搜救抓取一體化無人機的方案設計
2019-08-27 03:27:32章東莞張揚田文強熊欣胡楊
科技創新與應用 2019年22期
章東莞 張揚 田文強 熊欣 胡楊
摘 ?要:無人機由于其小型化、快速起降和無機載人員等特點,特別適用于搜索和災害救援,該功能要求無人機通過機載設備在目標區域尋找,選定并抓取“目標物品”;然后攜帶“目標物品”放到指定區域。本設計所要完成的目標定位系統搭建是通過圖傳將獲取的圖像信息回傳到地面站,然后電腦通過視頻采集卡讀取圖像信息并結合操作者通過紅外裝置確定的預抓取平面,在處理后獲得圖像中“目標物品”的圖像坐標,之后通過坐標轉換,將圖像坐標轉換成“目標物品”在真實世界中的坐標;最后將坐標發送給抓取平臺實現抓取。
關鍵詞:搜救;圖像;坐標轉換;一字線紅外激光器
中圖分類號:V279 文獻標志碼:A 文章編號:2095-2945(2019)22-0105-03
Abstract: Due to its miniaturization, rapid take-off and landing, and inorganic personnel, the UAV is especially suitable for search and disaster rescue. This function requires the drone to search for the target area through airborne equipment, select and capture "target item"; then carry the "target item" to the designated area. The target positioning system to be completed by the design is to transmit the acquired image information to the ground station through the image transmission, and then the computer reads the image information through the video capture card and combines the pre-crawling plane determined by the operator through the infrared device to process.The image coordinates of the "target item" in the image are obtained; then the coordinate of the image is converted into the coordinates of the "target item" in the real world by coordinate conversion; finally, the coordinates are sent to the crawling platform to implement the grab.
Keywords: search and rescue; image; coordinate transformation; one-line infrared laser
引言
無人機在近些年已經從軍事領域進軍到民用行業中,在搜救、自然災害監測、以及農業等領域已經有廣泛應用。在無人機偵察搜救方面的應用比如火場救援,地震災區搜救,以及航模搜救,基于無人機的高機動性都有著廣闊的應用前景。然而當下國內對于無人機搜救抓取方面的研究尚不成熟,在哈爾濱工業大學NRSL實驗室的研究成果中,無人機無需第三方設備的輔助,僅依靠自身的傳感器和相機,實現對目標的識別,軌跡規劃和抓取控制。目標識別和定位的還存在一些問題,其PID控制軌跡的效果并不是很好,在現實中單件應用起來成本高,還未具有成熟的使用價值。山西大同大學橋棟碩士的研究成果中談及的鐵絲網抓取方案雖然抓取面積大,但固定性不好,容易掉落。
1 基本原理
搜救抓取一體化無人機主要由數字定位系統,機械定位系統,紅外輔助定位系統,主控系統和四旋翼系統五部分組成,為了實現搜救與抓取一體化,直接思路是在無人機上復合具有抓取功能的系統,而要完成抓取功能需要先實現定位的功能,為實現定位,可采用在四旋翼無人機的機架上搭載一個拍攝無人機下方的高清攝像頭,通過該攝像頭將包含目標的圖像回傳到操控者的圖像顯示系統,利用MATLAB進行圖像處理,獲得目標抓取點的二維平面坐標,再將其傳入arduino 控制板上,通過設計機械定位機構使機械爪接收控制板發出的信號移動到對應目標正上方,至此就實現了定位的功能。通過設計可以伸縮并在不同高度閉合抓取的機械手從而實現目標物的抓取。特別的,對于圖像中不同高度的目標點的拾取問題,可采用能在機架上上下移動的一字線激光源來輔助操作者確定目標物品的待抓取點在圖像中的位置并同時把高度對應匹配上。這里采用的是半人工定位的方式,以實現經濟性和靈活性。該系統的模型如圖1所示。
2 數字定位系統?
2.1 概述
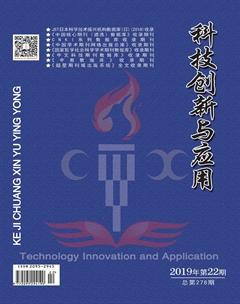
搜救與抓取一體化無人機在人工控制下進行抓取動作時,因為抓取目標地點是未知的,所以需要將圖像傳入到人工控制平臺處,由操作人員根據實時圖像確定抓取目標位置。MATLAB有對圖像進行數字化處理的功能,可以得到在MATLAB上某個像素點的位置,因此可以利用這個特點提前將無人機機架下方的若干個指定平面上每個點的位置與MATLAB上對應面上的對應點對應起來。當要抓取圖像中的某個目標時,只需要人在MATLAB上拾取合適的像素點,就可以得到目標在機架下方某平面內的較為精確的位置。坐標數據傳輸的硬件連接示意圖如圖2所示。
2.2 不同高度坐標轉換
由于需要建立攝像頭捕捉的目標位置與實際坐標的關系并且要實現對不同高度目標物的抓取,所以需要在MATLAB上建立不同高度坐標轉換關系式。
為了獲得更大的視野,需將攝像頭偏離軸線斜置約20度,然后對傳輸回來的圖像進行桶型畸變矯正,這里采用空間坐標的前向映射法和雙線性插值法相結合的方法。為了獲取正確的目標坐標以及簡化后續抓取運算步驟,需要進行一個透視變形以此建立一個虛擬救援平臺。
在獲取紅外輔助定位系統所得到的高度值之后,即待抓取目標高度值,將以像素坐標系、圖像物理坐標系、世界坐標系的坐標轉換順序從上位機發送正確的待抓取物的三維坐標值。坐標轉換示意圖如圖3。
經過上述變換以后,所得到的(x2,y2)都是相對于圖像中X1軸和Y1軸投影到地面中的X2軸Y2軸的距離。我們在實際中所使用的坐標系是以救援平臺的角度轉軸與地面的交點為坐標原點,角度轉軸方向為Zw軸,XwYw平面在地面上的三維XwYwZw坐標系,因此還要進行一個坐標的平移。為了方便坐標的平移我們使用十字線紅外激光作為輔助。十字線紅外激光固定在救援平臺的一腳上上下移動,這樣就可以確定Xw軸和Yw軸的位置。由此就可以算出需要進行平移的量,再給不同象限的值加上相應的正負號,就可以得到真實的坐標值。
3 機械定位系統
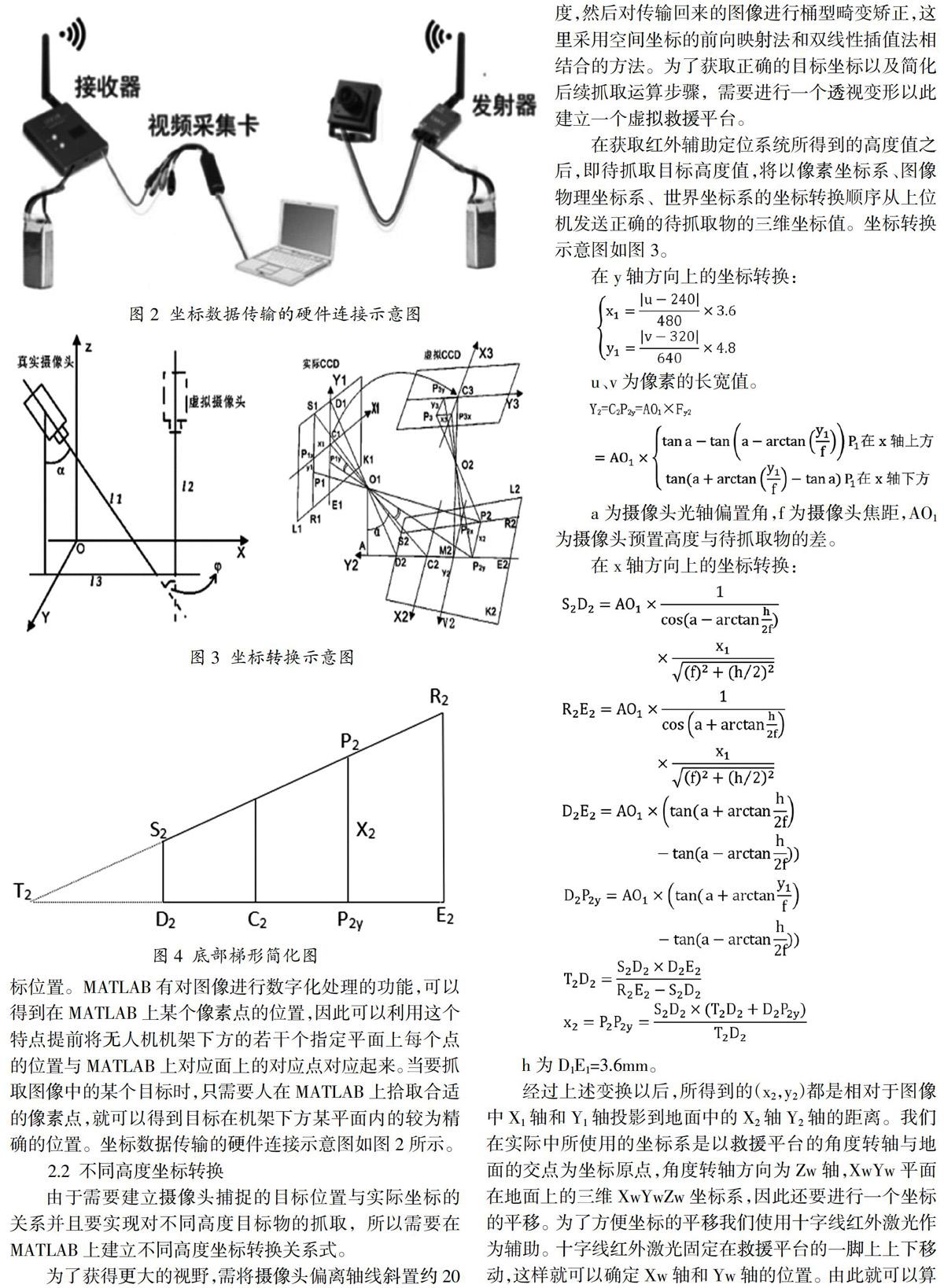
搜救與抓取一體化無人機在人工控制下進行搜救與抓取動作時,因為需要抓取物的精確位置并不是已知的,所以不能進行點對點抓取,只能在人工控制下到達目標正上方一定范圍內。所以,有必要設計出能夠將機械爪移動到目標正上方的機械結構。而這個結構要能夠受主板控制系統控制,到達主板指定位置。可以采用極坐標系定位,用一個360度舵機控制機械爪的頂部移動,使用角位移傳感器實現對舵機輸出量的控制,另用一個360度舵機,用同步帶及帶輪連接的方式實現轉動量轉化為直線位移量。機械定位模型圖如圖5所示。
4 紅外輔助定位系統
在機架的一個腳上裝上一個可以上下滑動的同步皮帶,在皮帶上裝上一字線激光器,轉動皮帶的同步帶輪的轉動由360度小舵機來實現并且用電位器來實現對高度的反饋,該360度舵機由操控者來直接操控,一字線激光輔助操控者判斷想要抓取物體部分的高度,實現對目標物的不同高度部位的抓取。結構設計如圖6所示。
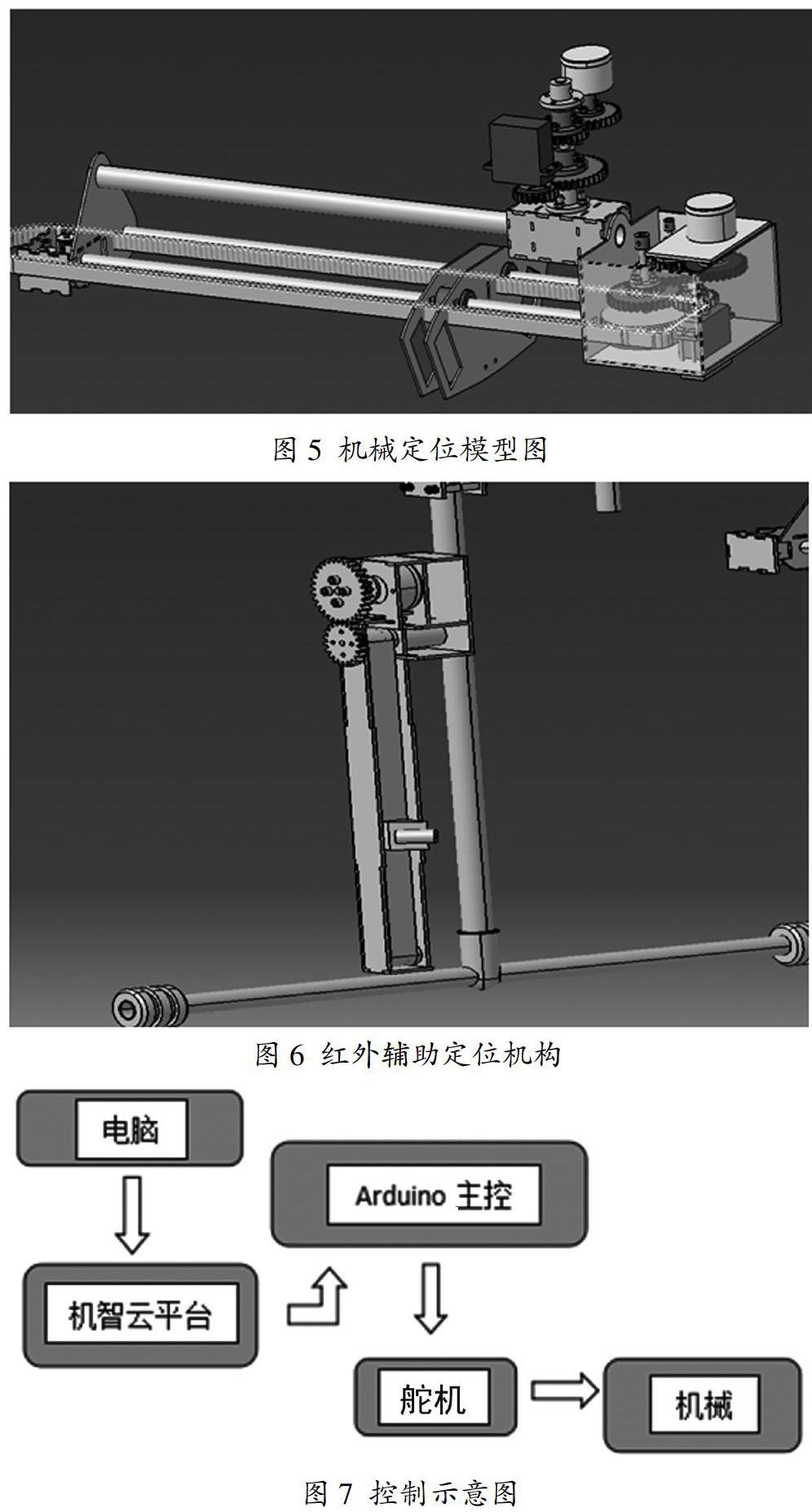
5 主控系統
通過獲得目標在圖像中的像素坐標以后,還需進行坐標轉換以獲得目標的世界坐標。然后將目標在笛卡爾坐標系中的坐標轉化為極坐標系中的坐標,一系列轉換以后MATLAB會將坐標通過串口發送給地面站的arduino控制板,然后再通過無線模塊發送給救援平臺上的控制板從而實現抓取。控制示意圖如圖 7所示。
6 結論
(1)本文基于MATLAB軟件以及無限終端設備建立了一套可行的搜救抓取一體化無人機方案:通過高清攝像頭將包含目標的圖像回傳到操控者的圖像顯示系統,利用MATLAB進行數字圖像處理獲得目標抓取點的二維平面坐標,再將其傳入控制芯片上,通過設計機械定位機構使機械爪移動到對應目標正上方實現抓取。
(2)為了實現可以抓取不同高度,不同形狀的立體的目標物,本文設計采用一字線激光源來輔助操作者確定目標物品的待抓取點在圖像中的位置能夠與相應高度的平面對應起來,采用可以在不同高度閉合抓取的機械手從而實現目標物的抓取。
(3)該方案仍有些許不足,對操作者有一定要求,并且無人機需要降落在平坦的地面上,抓取精度也不是很高。
參考文獻:
[1]喬棟,薛彩梁.某空中飛行器抓取裝置結構優化設計[D].山西大同大學,2016.
[2]都業貴.基于視覺伺服的飛行機械臂抓取控制[D].哈爾濱工業大學,2016.
[3]張蕾.國外無人機發展趨勢及關鍵技術[J].電訊技術,2009,49(07):88-92.
[4]曹志偉.無人機技術研究現狀和發展趨勢[J].民營科技,2017(04):57.
[5]潘煉.傳感器原理及應用[M].電子工業出版社,2012.
[6]王祁.傳感器信息處理及應用[M].科學出版社,2012.
[7]高宏.基于Pro/E的三自由度機械臂末端執行曲線軌跡勻速運動的仿真與實現[J].現代制造工藝設備,2014(4).
[8]沈洪星.單/多四旋翼無人機系統平臺的設計及若干應用的研究[D].浙江大學,2016.
[9]高珍,鄧甲昊,孫驥,等.微型無人機圖像無線傳輸系統的發展現狀及其關鍵技術[J].科技導報,2007,25(16):68-72.
[10]劉亞強,陳文藝.桶形畸變圖像的一種校正方法[J].西安郵電大學學報,2012,17(2):27-30.