基于智能手機運動傳感器的步態特征身份識別方法
2019-08-27 02:26:02孔菁郭淵博劉春輝王一豐
計算機應用 2019年6期
孔菁 郭淵博 劉春輝 王一豐
摘 要:利用行為特征進行身份驗證是生物識別的前沿技術。為優化基于步態特征的身份識別研究中對數據的處理并改進識別的方式,提出利用智能手機運動傳感器數據提取步態特征用于身份識別的方法。首先,應用空間轉換算法解決傳感器坐標系漂移問題,使數據可以完整準確地刻畫行為特征;然后,利用支持向量機(SVM)算法對用戶切換所導致的步態特征變化進行分類識別。實驗結果表明,經過歐拉角法處理后,所提方法識別準確率達到95.5%,在有效識別用戶變換的同時降低了空間開銷和實現難度。
關鍵詞:空間坐標轉換;步態特征;加速度傳感器;歐拉角法;支持向量機
中圖分類號: TP393.08
文獻標志碼:A
Abstract: The identification based on behavior features is a leading technology of biometric recognition. In order to optimize the process of data processing and the way of recognition in the existing studies of identification based on gait feature, a method of extracting gait features from the data of smart phone motion sensors for identification was proposed. Firstly, a spatial transformation algorithm was used to solve the problem of sensor coordinate system drift, making the data to describe the behavior features completely and accurately. Then, Support Vector Machine (SVM) algorithm was used to classify and identify gait features change caused by user transformation. The experimental results show that, the identification accuracy of the proposed method is 95.5%. It can be used to effectively identify user transformation with reduction of space cost and implementation difficulty.
Key words: spatial coordinate transformation; gait feature; acceleration sensor; Euler angle method; Support Vector Machine (SVM)
0 引言
生物識別是通過計算機視覺、人體生物學、生物統計學等高科技理論與手段結合,利用人體固有的生理特性或表現出的行為特征進行身份識別與認證的過程。生物識別技術主要利用的是人類生物特征,生物特征通常具有普遍性和唯一性。普遍性即所有用戶都擁有此特征;唯一性即不同用戶擁有不同但同類的特征。由于其具有與生俱來的遺傳性和終身不變等特點,目前生物識別技術較傳統識別技術而言存在較大優勢。
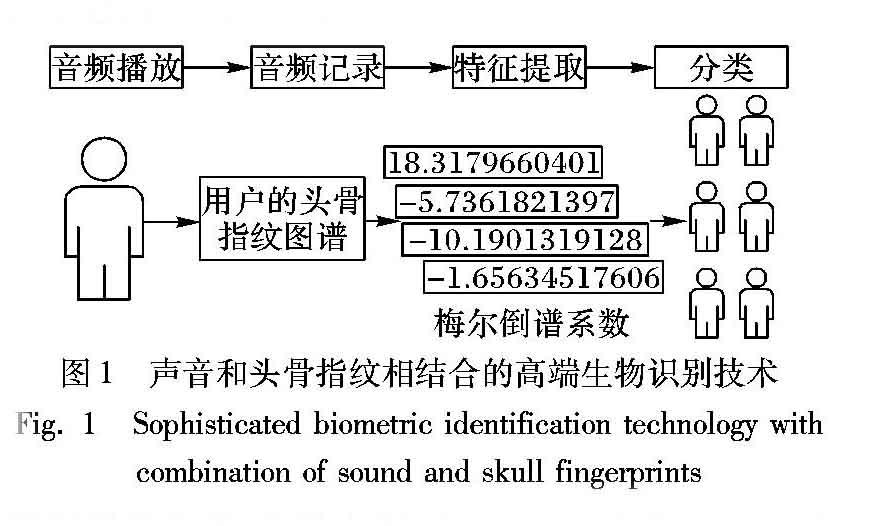
如今全球信息化迅速發展,網絡化所引發的身份數字化與模糊化導致了普遍的個人隱私信息泄露問題,這對身份識別與安全驗證提出了更高的標準和要求。常見的傳統安全認證方法包括用戶名密碼組合驗證、特有物件驗證(如通行證、二維碼、口令等)、PIN(Personal Identification Number)碼驗證等,這些驗證方式過程中人為參與因素過多而易被盜取或模仿,無法實現高級別和高精度的安全防控。客觀因素帶來的危險難以避免,但利用生物特征的認證方式即可將其解除,因為用戶的生物特征難以更改,不容易被模仿,被盜用可能性小,在政府軍隊、銀行、福利保障、電子商務等領域均有廣泛應用[1]。現有成果中較高端的生物識別技術中將兩種特征結合,利用聲音和人體頭骨建立圖譜進行高精度身份識別認證的流程示意圖如圖1所示。
根據國際生物識別小組(International Biometric Group, IBG)目前的統計結果,已有生物識別技術主要分為針對生理特征和行為特征的兩種應用,利用人體生理特性的身份識別應用較多,如指紋識別、掌紋識別、人臉識別、虹膜識別等[2];基于用戶行為特征的生物識別技術種類也有部分應用,如筆跡識別、聲音識別、步態識別等,這些技術指標對比如表1所示。可見基于行為特征的生物識別在相同設備成本等級中擁有最高的安全等級和準確性,同時擁有較高的便利性和穩定性,是該研究領域的新潮流。
目前利用生物特征進行身份識別的工作原理如圖2所示,主要利用細節匹配的方法來識別用戶身份。其中指紋識別是利用手指的皮膚紋理進行認證,目前結合深度學習的相關知識廣泛應用[3],缺點在于日常生活中手指動作頻繁易造成皮膚紋理改變,且已出現大量針對指紋竊取和更改的成熟技術出現;人臉識別利用計算機分析圖像并從中提取有效個人識別信息,最終判別出對象的身份[4]。人臉識別雖目前已有較為成熟的應用但其運行的穩定性較差,如拍攝角度、背景光線等均會對識別結果造成影響,導致誤報率極高,應用性較差;虹膜識別[5]目前在全世界范圍內被公認為是已有身份識別技術中最為精確的一種,虹膜即人體眼睛內鞏膜和瞳孔之間的環狀區域包含了豐富的紋理特征,其結構由遺傳基因決定后天不能更改,且不易竊取或偽造。但虹膜識別需要配備高端的儀器進行虹膜圖像采集和專業人員提供科學技術支撐,不適合日常工作中推廣與使用。
根據生物學常識可知,用戶除受傷等意外發生的正常情況下步行時的步幅、步速、擺臂幅度與頻率等表現出很明顯且較為固定的生物特性,為基于行為特征的身份識別技術研究提供了新思路。2005年,Ailisto等[6]首次提出利用獨立加速度傳感器采集用戶行走時的數據進行步態特征提取用于身份識別,驗證了基于加速度傳感器進行基于步態特征的身份識別的可行性。隨著智能手機的發展與使用的推廣,其內置加速度傳感器被用于步態識別更加普遍[7],用戶在正常行走時可同時實現對身份的實時識別,從而達到了對貴重便攜式電子產品的保護[8]。Nicel等[9]利用動態時間歸整(Dynamic Time Warping, DTW)算法,比較訓練集和測試集的最小規整路徑,以步態周期為單一特征值,得到的能量效率比達到20%。Hoang等[10]將兩個手機分別放置在14個不同實驗參與者的大腿上,在相同地板上進行往返走12次,利用支持向量機來測試數據來源的準確性,該方法展現了支持向量機分類器在處理該類數據方面的優勢。
近些年來基于步態特征的身份識別技術主要有3個數據來源:計算機視覺、壓力傳感器和加速度傳感器。計算機視覺的方法首先利用視頻錄制或圖片拍攝等手段采集用戶行走時的圖像信息建立個人數據信息庫,再通過圖像識別技術進行比對從而辨別不同的用戶[11],但存在視覺范圍、障礙物遮擋、拍攝角度、光線不足等問題,繼續發展和推廣應用的局限性較大;基于壓力傳感器的方法通常將特制的壓力傳感器事先在水平的地面上設置好,然后采集用戶步行通過時足底壓力的分布情況[12],但該過程需要在特定設備上行走才能進行有效的身份驗證,實際中應用較少;加速度傳感器具有可隨時置于人體特定部位進行步行數據采集的優勢,不受視覺影響和場地限制,因此基于步態特征的身份識別依賴更多是傳感器采集數據。智能手機使用的普及和加速度傳感器硬件的更新換代使得數據采集過程更加方便快捷,且可更有效地保護用戶的隱私信息。
與獨立可傳感器相比,手機內置加速度傳感器與設備自身固定[13],使用自定義坐標系,在數據采集時手機姿態的改變會導致坐標系不斷發生漂移,此情況下即使同一用戶進行相同運動過程時加速度傳感器的數據也難以表現出固定的數據特征。為解決該問題,實驗在對步態特征進行識別前增加了坐標系方向轉換的數據處理步驟,使得采集的數據對用戶個人特征的描述更加準確。
綜上所述,本文提出基于智能手機運動傳感器數據步態特征身份識別的方法主要由兩大部分組成:空間坐標系的轉換和行為特征的識別分類,基本思路如圖3所示。首先,利用空間轉換算法對加速度傳感器所在坐標軸進行轉換,提高數據對運動情況描述的準確性;再利用支持向量機分類算法對步態特征進行識別。該算法在人類行為識別領域公認效果較好,本文將其推廣至步態特征身份識別領域,并通過實驗驗證了所提方法的有效性。
1 數據處理
在采集和收集數據的過程中手機的位置和姿態會引起傳感器所在坐標系在慣性空間中發生旋轉,從而產生嚴重的位置漂移,導致數據之間映射關系發生變化,無法準確反映運動的實際狀態。為解決該問題,在進行特征識別之前首先利用空間坐標轉換算法對加速度傳感器數據進行處理,將其從手機坐標系映射至常用慣性坐標系,不破壞原始數據特征的情況下確保訓練和測試數據可以反映出用戶實際的運動特征和運動狀態。
1.1 空間坐標系統
物理空間常用坐標系有三種:自基準坐標系(即自定義坐標系)、慣性坐標系和世界坐標系。智能手機加速度傳感器所在的坐標系是自基準的相對坐標系[14],該坐標系以手機屏幕的中心點為坐標原點,平行于屏幕短邊向右為該X軸正方向,平行于屏幕長邊向前為Y軸正方向,垂直于屏幕向上為Z軸正方向。世界坐標系是絕對坐標系,通過地球表面經緯度和海拔高度對世界每個點進行詳細準確的方位信息描述。常用慣性坐標系原點與手機自基準坐標系原點重合,坐標軸與世界坐標系的坐標軸平行。因此,從加速度傳感器自基準坐標系到慣性坐標系的轉換需旋轉操作,從慣性坐標系到世界坐標系的轉換較為簡單只需平移操作即可。手機坐標系與世界坐標系之間的關系如圖4所示。
從智能手機內置加速度傳感器采集到的原始數據反映的是加速度傳感器在自基準坐標系空間中的數據信息,而不是在慣性坐標系中感知的用戶真實運動信息;加速度傳感器所在的自基準坐標系與慣性空間正南正北方向的夾角可由手機中其他傳感器測量給出,因此采集到的加速度傳感器原始數據在進行高精度的身份識別前要利用已知角度和空間坐標轉換算法將數據從手機自基準的坐標系轉換到慣性坐標系上。
1.2 歐拉角法
歐拉角法常用于處理在數學定義的三維空間中坐標系旋轉問題,是由L.歐拉提出的一種常用的描述方位的方法,廣泛應用于經典力學與量子力學等研究中,其基本思想是將兩個坐標系的變換分解為繞不同坐標軸的三次連續轉動組成的序列,從而使兩坐標系重合。
歐拉角旋轉順序規定連續兩次旋轉必須繞著不同的轉動軸。對于加速度傳感器而言,在空間中共有12種不同旋轉順序。本實驗選用最常見的Z-Y-X旋轉順序來描述加速度傳感器所在坐標系與慣性坐標系之間的關系,坐標分解旋轉如圖5所示,三種不同的虛線分別代表不同次數加速度傳感器自基準坐標系旋轉后得到的結果。
加速度傳感器原始數據在空間中的角度數據處理的過程具體如下。
2 基于支持向量機的身份識別
支持向量機是機器學習領域有監督學習模型的常見分類算法,常用來進行模式識別、數據分類以及回歸分析,通過一個非線性映射把樣本空間映射到一個高維乃至無窮維的特征空間中,使得在原來的樣本空間中線性不可分的問題轉化為在特征空間中的線性可分的問題。該算法可用于解決的現實問題有很多:
1)對文本和超文本的分類效果較好,支持向量機分類器在其中可以為應用程序顯著減少對標準感應和轉換設置中標記的訓練實例的需求;
2)視頻中的圖像分類使用支持向量機分類器搜索精度要比傳統的查詢優化方案高得多,包括使用特權方法的修改版的支持向量機系統;
3)支持向量機分類器可對手寫的字符進行高精度的識別,目前在國內的研究中在自然語言處理與語義消歧等領域已有廣泛應用;
4)在生物科學領域中支持向量機分類器的引入有效提高了高分子蛋白等復雜模型的分類結果。
該分類器的主要思想可概括為以下兩點:
1) 針對線性可分情況進行分析,對于線性不可分的情況常通過使用非線性映射算法將低維輸入空間線性不可分的樣本轉化為高維特征空間使其線性可分,從而使得高維特征空間采用線性算法對樣本的非線性特征進行線性分析成為可能。
2) 在基于結構風險最小化理論之上在特征空間中構建最優超平面,對空間中的數據點進行分類,保證在數據訓練階段學習器可以得到全局最優化的分類結果,且在整個樣本空間的期望以某個概率滿足預測的一定上界。
傳統可穿戴式的傳感器產生數據后需要特殊媒介或可靠無線網絡數據傳輸后離線進行分析和預測,無法做到實時性的身份識別;使用智能手機內置加速度傳感器進行身份認證時該識別程序可直接在手機內存空間上運行,降低了數據傳輸的資源開銷同時節省了識別過程總用時,還可以有效實現對身份的實時識別。而在利用加速度傳感器數據進行身份識別的傳統方法中為提高結果的準確率多采用復雜度和實現難度高的算法(如隨機森林、神經網絡等)對數據進行分類處理,由于忽略了分析數據特征的重要性導致實現難度高造成不必要的資源浪費。身份識別研究的本質可歸結為二分類問題,目前支持向量機算法在處理該類問題的算法中性能最為突出,適合用于識別由用戶切換導致的步態特征變化。
由于加速度傳感器數據是線性不可分的,首先利用核函數將其映射到高維空間,在高維空間非線性的問題轉化為線性可分的問題。本實驗選用的是線性核函數K(x,y)=xTy。設x為輸入向量,即樣本集合中的向量;w為可調權值向量,是每個向量可調權值;b為偏置,即超平面相對原點的偏移。使用U+1、U-1分別表示兩個類+1和-1,則有需求的決策曲面方程如下:
3 實驗與結果分析
3.1 實驗數據采集
在實驗數據采集階段利用Android系統研發工具Android Studio集成一個小型應用程序進行數據的采集,根據數據特征對采樣頻率、記錄數據對象和寫入存儲卡方式等進行調整。目前Android、IOS或黑莓等常見系統上均沒有對無需許可的傳感器進行特殊管理或保護其數據信息流的管理控制機制,即任意應用程序都可通過訪問傳感器應用程序接口從而訪問所有無需許可的傳感器并獲取其數據,這亦是本實驗數據采集框架的理論基礎。
傳感器應用程序接口是一組定義程序及協議的集合,通過該接口實現應用程序之間、應用程序與傳感器硬件、傳感器硬件之間的相互通信;其主要功能是提供通用功能集,為應用程序開發人員提供可以訪問的一組例程,而又無需訪問源碼或理解其內部工作機制的細節,這樣程序開發人員在開發應用程序時可通過調用應用程序接口提供的函數直接對應用程序進行開發,減輕了研發過程中的人工編程任務。應用程序接口同時也可視為一種中間件,為不同平臺的工作提供各種數據來源,即達到資源高度利用與共享的功能。
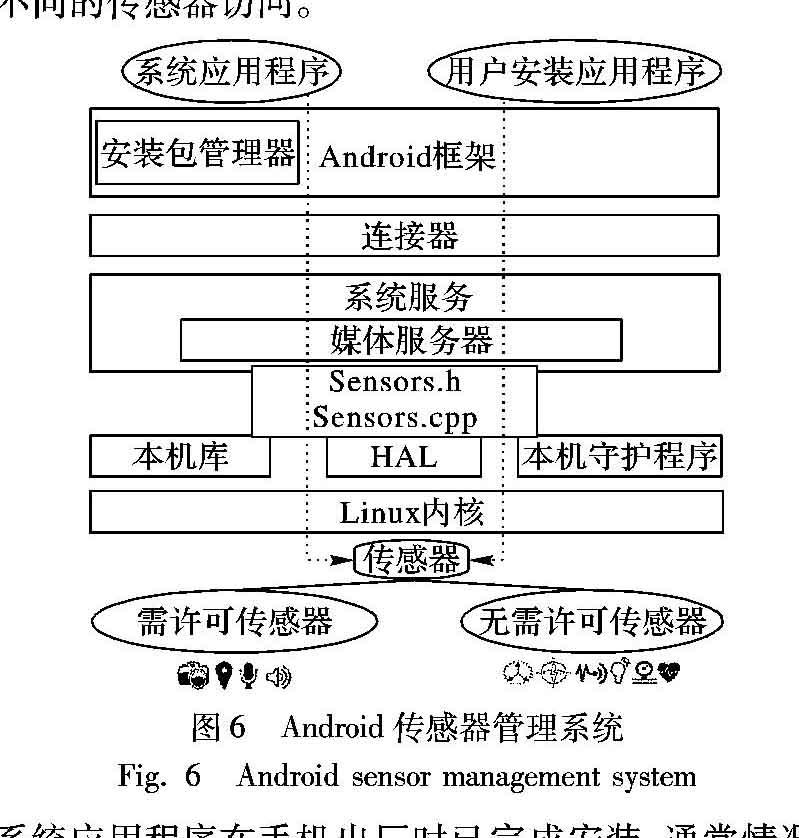
本文實驗在Android系統智能手機上完成,數據采集和處理方法經適當調整可推廣到其他系統的智能手機上。在數據采集階段首先利用Android智能手機內部傳感器組織框架集成了一個小型應用程序用于獲取實驗所需的無許可傳感器數據。為方便數據導出,首先將存儲卡的數據讀寫權限授予該應用程序,然后導入可處理監聽事件的硬件監聽,同時對實驗用到的傳感器逐一注冊監聽器,最后利用Android調試工具生成Android應用程序安裝包(Android PacKage, APK),導入手機安裝成功后在開啟狀態下即可監聽傳感器產生的數據并寫入指定列表。圖6展示了Android系統如何通過由用戶安裝的應用程序和由生產商自動安裝的系統應用程序來處理來自不同的傳感器訪問。
系統應用程序在手機出廠時已完成安裝,通常情況下用戶購買后使用時無法卸載或修改權限。而非系統應用程序在安裝時首先通過開發工具包向應用程序接口平臺發送訪問傳感器請求,然后將應用程序注冊到相應的傳感器;如果多個應用程序同時嘗試注冊相同的傳感器,應用程序接口平臺會運行多路復用程序,使不同的應用程序可在同一個傳感器中同時注冊。硬件抽象層(Hardware Abstract Layer, HAL)是系統內的一個接口,將傳感器硬件與系統的設備驅動程序相互綁定。硬件抽象層具體由Sensors.h和Sensors.cpp兩部分組成,Sensors.h是硬件抽象層的接口,Sensors.cpp為硬件抽象層實現具體指令的工作。
通過硬件抽象層的本機庫,不同的應用程序可以與底層的Linux內核通信,讀取和寫入與制定的傳感器相關的文件。目前對于大多數無需許可的傳感器而言訪問這些文件是不需要任何權限的。而對于需許可的傳感器則首先需要用戶一個明確的授權指令,以確保應用程序可以正確地訪問一個特定文件。用戶授權信息會在系統清單中具體聲明,一旦用戶在安裝程序之初選擇接受,后期即使在沒有其他明確許可的情況下該應用程序也可以直接訪問其他無許可傳感器。同時Android系統傳感器框架可用來訪問設備的內置傳感器,并提供了有助于完成數據采集工作的大量接口,這些接口可用于在采集中確定內置傳感器種類,并在注冊和注銷傳感器權限時執行監聽。
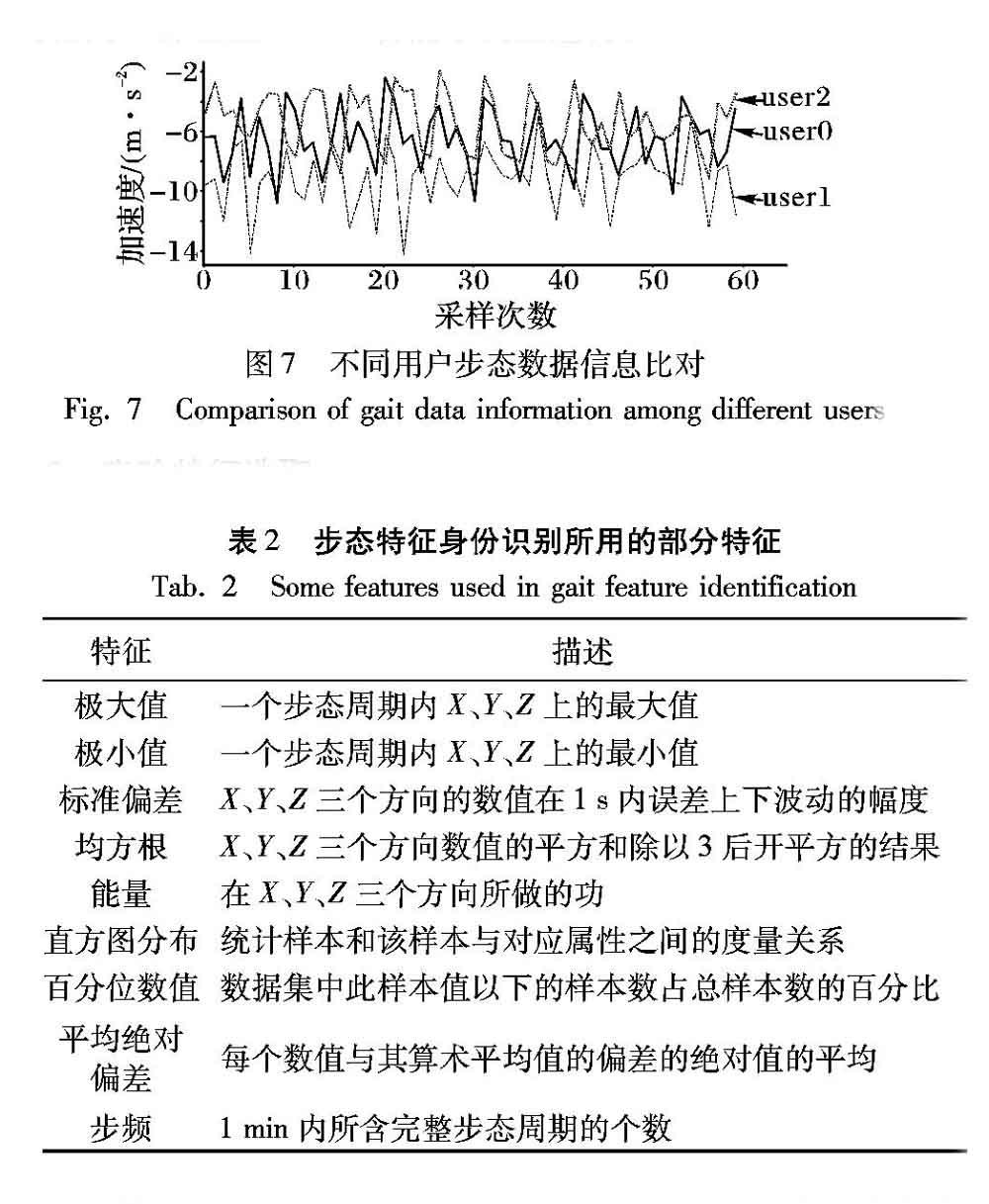
圖7為采集的三個用戶手持手機步行時Y軸的數據信息,可見存在極強的個體差異性,身份表示性明顯。由于該應用程序未通過專業評估系統的應用安全認證與重點病毒排查等檢測,不適合于廣泛的安裝與使用,故實驗數據采集的過程均在同一部三星Note 3智能手機上進行。
3.2 實驗特征選取
正常成年人的步行過程是按照規律性動作進行的,左腳和右腳各向前一步稱為一個完整的步態周期。在本文中,通過加速度傳感器Y軸極小值將數據劃分成多個小周期,即可方便定位出數據所對應的每個步態周期。根據統計顯示,一個步態周期的平均時間約為1s,為實驗計算方便起見將加速度傳感器的采樣設置頻率為50Hz,即1s取數值50次。對步態特征的選取包括時域特征、頻域特征和數據統計特征,這些特征都是以一個完整的步態周期為單位的。
其中,均方根(Root Mean Square, RMS)在電力學中較常見,是交流電波的有效電壓或電流的一種普遍的數學表示方法;標準偏差即標準差,在概率統計論中常作統計分布程度(statistical dispersion)上的測量,定義為方差的算術平方根,反映組內個體間的離散程度,該概念是由卡爾·皮爾遜(Karl Pearson)引入到統計學中的。標準差和方差都可反映出一個數據集的離散程度,當樣本的平均數相同時標準差卻未必相同。
根據研究本文引入了一個在身份識別領域不常用的特征:梅爾頻率倒譜系數(Mel-Frequency Cepstral Coefficients,MFCCs)。梅爾頻率倒譜系數(MFCCs)即組成梅爾頻率倒譜的系數。梅爾頻率是基于人耳聽覺特性提出的,與赫茲頻率成非線性對應關系,主要用于語音數據特征的提取和降低運算維度。在本文中梅爾頻率倒譜系數用于表示離散的余弦變換相關參數組,通過對計算輸出能量的變換后再次進行計算而得到的,這些能量是計算機系統經過自動的特殊處理通過集合的形式導出的。與時域特征相同的是,梅爾頻率倒譜系數需要對每個方向上的梅爾頻率分別進行計算。
為得到理想的識別效果,本文利用不同特征組合進行多次實驗,利用平均準確率來測評不同特征組合通過支持向量機訓練后對用戶步態特征變化的識別情況,測試的實驗過程及具體結果將在下面具體描述。
3.3 實驗過程與分析
數據采集階段共有20名不同年齡、不同身高、不同性別、不同職業的志愿者參與,每名志愿者手持手機步行的時間大約為15min(去除步行起始與結束導致的不平穩段數據),統一在光線、摩擦系數等客觀因素均相同的光滑大理石走廊進行手持手機步行的行為。每個志愿者的步行數據前70%用于訓練,形成個人獨有的步態特征數據畫像,后30%用于后續的實驗測試部分。
為保護這些志愿者的個人隱私,將他們的個人信息隱去,在實驗中進行1~20的編號,故在數據訓練階段結束后將得到20個獨立的用戶步行數據特征畫像。在實驗測試的準備階段,將1號畫像數據取2s分別與2~20號畫像的2s數據進行拼接作為輸入(以此類推至最后一組19號與20號),完成一次測試后將兩組拼接的數據進行位置互換然后再重復實驗,用于檢測支持向量機是否能準確檢測出用戶的切換。故實驗的測試階段共有(19+18+…+2+1)×2=380小組的實驗。
根據對特征的分析,將7個特征首先由少至多組合,然后分別對支持向量機分類器進行訓練和測試,所選用的特征數量與識別準確率關系如表3所示。可見測試實驗從“Y軸極小值+Z軸極大值+Z軸能量”3個特征組合逐個增加,至“Y軸極小值+Z軸極大值+Z軸能量+Z軸均方根+步頻+Z軸梅爾頻率倒譜系數+X軸梅爾頻率倒譜系數”7個特征的組合。根據表3所示,實驗結果顯示增加步頻后識別準確率大幅度提升,表明步頻對用戶步態特征具有很強的代表性。
從測試結果看,本文利用數據特征對個人步態進行的描述越具體,最后的識別準確率越高,7個特征的組合可達到95.53%的識別準確率,驗證了該方法的有效性。由于數據集規模的限制,增加特征后識別時間隨之遞增但空間占用增加不大,后續可適當增加特征的數量,擴展訓練樣本數據集,尋找對用戶步態特征描述更加準確的數據特征。
對比國內外相似的研究,文獻[15]沒有對手機自定義坐標軸的數據進行處理,得到92%左右的識別準確率,過程中數據處理難度高且空間開銷大;文獻[16]集成的客戶端加入了計步功能,其中識別部分利用了四元數的空間轉換方法,其實現復雜程度大于歐拉角法,但效果上無明顯改善。
4 結語
本文提出了基于智能手機加速度傳感器數據的步態身份識別方法,并通過實驗驗證了其有效性,在用戶發生變換時可準確識別出特征值的變化,達到了身份識別的自動預警功能,可在改進優化后在其他型號的智能手機上推廣使用。在資源條件允許的情況下應適當增加訓練數據集的數據量,可更準確地對用戶進行行為特征畫像,進一步提高了識別的準確率。目前個人手機內存儲了大量隱私相關的信息與數據,一旦遺失不僅會對生活與工作造成麻煩,還有可能泄露個人隱私甚至是商業機密。基于步態特征識別技術的發展與推廣使用還可促進智能手機防盜功能的發展,如為用戶建立個人傳感器行為數據畫像,當識別出當前時間段的運動或使用行為與正常模式下的特性發生變化時,系統可自動預告與預警(如通知緊急聯系人),或開啟數據保護功能(如長久鎖屏、禁用USB接口等)。
目前指紋識別、人臉識別等基于生物特征的生物識別技術在日常生活的多領域已有廣泛應用,虹膜識別、DNA識別等需要高端科技配合的手段仍處于實驗階段;隨著研究成果的出現和數據來源的豐富,基于行為特征的身份識別技術正蓬勃發展,將成為該領域的新熱點。
參考文獻 (References)
[1] 李鵬飛,淡美俊,姚宇顫.生物識別技術綜述[J].電子制作,2018(10):89-90.(LI P F, DAN M J, YAO Y Z. Overview of biometric identification technology [J]. Practical Electronics, 2018(10): 89-90.)
[2] 王俊山,張文明.生物識別技術的類別及其在身份識別中的應用[J].河南科技,2017(15):34-35.(WANG J S, ZHANG W M. The category of biometric chip and its application in identity [J]. Journal of Henan Science and Technology, 2017(15): 34-35.)
[3] 陳虹旭,李曉坤,鄭永亮,等.基于深度學習的指紋識別方法研究[J].智能計算機與應用,2018,8(3):64-69.(CHEN H X, LI X K, ZHENG Y L, et al. Research on fingerprint recognition method based on deep learning [J]. Intelligent Computer and Applications, 2008, 8(3): 64-69.)
[4] 張笛.人臉識別現狀與發展趨勢研究[J].廣東通信技術,2018,38(6):43-48.(ZHANG D. Research on the status quo and development trend of face recognition [J]. Guangdong Communication Technology, 2008, 38(06): 43-48.)
[5] 馬璐璐,朱雪珍.虹膜識別專利技術綜述[J].河南科技,2017(16):55-57.(MA L L, ZHU X Z. Review on the patent technology of iris recognition [J]. Journal of Henan Science and Technology, 2017(16): 55-57.)
[6] AILISTO H J , LINDHOLM M, MANTYJARVI J, et al. Identifying people from gait pattern with accelerometers [C]// Proceedings of SPIE 5779 — the International Society for Optical Engineering, Biometric Technology for Human Identification II. Bellingham: SPIE, 2005: 7-14.
[7] DERAWI M O, NICKEL C, BOURS P, et al. Unobtrusive user-authentication on mobile phones using biometric gait recognition [C]// Proceedings of the 2010 Sixth International Conference on Intelligent Information Hiding and Multimedia Signal Processing. Washington, DC: IEEE Computer Society, 2010: 474-479.
[8] THANG H M, VIET V Q, THUC N D, et al. Gait identification using accelerometer on mobile phone [C]// Proceedings of the 2012 International Conference on Control, Automation and Information Sciences. Piscataway, NJ: IEEE, 2012: 344 -348.
[9] NICKEL C, DERAWI M O, BOURS P, et al. Scenario test of accelerometer-based biometric gait recognition [C]// Proceedings of the 2014 Third International Workshop on Security & Communication Networks. Piscataway, NJ: IEEE, 2014: 167-174.
[10] HOANG T, NGUYEN T, LUONG C, et al. Adaptive cross-device gait recognition using a mobile accelerometer [J]. Journal of Information Processing Systems, 2013, 9(2): 333-348.
[11] 劉冠群,羅桂瓊,譚平.基于類Haar特征模板匹配的多鏡頭步態識別算法[J].計算機工程,2017,43(12):231-236.(LIU G Q, LUO G Q, TAN P. Multiple Lens gait recognition algorithm based on category Haar feature template matching [J]. Computer Engineering, 2017, 43(12): 231-236.)
[12] 佟蘇洋,和煥胤,湯澄清.基于足底壓力分析系統對青年人行走步態特征穩定性的研究[J].四川警察學院學報,2017,29(6):77-83.(TONG S Y, HE H Y, TANG C Q. Stability of the youths gait characteristics in walking based on the plantar pressure analysis system [J]. Journal of Sichuan Police College, 2017, 29(6): 77-83.)
[13] KOMARINENI S,MACLEAN D,HASHIMI S.精通Android 3[M].楊越,譯.北京:人民郵電出版社,2011:728-733.(KOMARINENI S, MACLEAN D. Pro Android 3 [M]. YANG Y, translated. Beijing: Post & Telecom Press, 2011: 728-733.)
[14] 張勇,夏家莉,陳濱,等.Google Android開發技術[M].西安:西安電子科技大學出版社,2011:124-127.(ZHANG Y, XIA J L, CHEN B, et al.Google Android Development Technology [M]. Xian: Xidian University Press, 2011: 124-127.)
[15] PHAN D-T, DAM N N-T, NGUYEN M-P, et al. Smart kiosk with gait-based continuous authentication [C]//Proceedings of the 2015 International Conference on Distributed, Ambient, and Pervasive Interactions, LNCS 9189. Cham: Springer, 2015:110-115.
[16] 侯東谷.基于智能手機的人體步態識別及其應用[D].成都:電子科技大學,2018:58-71.(HOU D G. Human gait recognition and its application based on smart phones [D]. Chengdu: University of Electronic Science and Technology of China,2018: 58-71.)
