基于磁矩分解的運動艦船磁場模型研究
2019-08-28 01:16:12羅靜博崔桉愷
數字海洋與水下攻防 2019年3期
陳 浩,羅靜博,崔桉愷
(海軍工程大學 兵器工程學院,湖北 武漢 430000)
0 引言
到目前為止,在水中兵器應用領域,對艦船磁場建模的基本假設是艦船靜止停泊在固定方向上,由此導出的艦船磁場是靜態磁場,滿足拉普拉斯方程[1-2]。采用等效源方法或有限元等方法[3-5],能夠精確求解出艦船磁場的數學模型,據此評估艦船的磁性狀態,所建模型也能較好地用于測量點附近保持同一航向運動的艦船。艦船的固定磁場在十幾天內是不變的,但是其感應磁場卻隨著航向和航行地點的變化而變化[6],因此,根據單一方向測量數據解出的磁場模型不能用于評估不同緯度、不同航向的艦船磁場。需要掌握艦船的實時磁場狀態,便迫切需要建立艦船磁場在實際航行中的數學模型。本文將通過等效源的方法,求出固定磁矩參數和感應磁矩參數。其中固定磁矩是不變的,適應于不同緯度和不同航向,而感應磁矩可以根據不同航向和不同緯度的磁場投影的大小進行調整后精確描述運動艦船磁場的磁性。由此建立艦船磁場能適用于不同航向和不同緯度的數學模型。
1 旋轉橢球體與磁偶極子混合陣列模型
艦船磁場建模等效源中最常見的就是偶極子和旋轉橢球體[7-8],其中包括:均勻磁化的旋轉橢球體模型、旋轉橢球體陣列模型、磁偶極子陣列模型、旋轉橢球體與磁偶極子混合陣列模型。需根據艦船磁場的產生機理和磁源分布特征來建立數學模型[9]。建模中,采用合理的模型參數描述艦船磁場的分布規律;采用高魯棒性模型求解方法求解模型參數;同時采用統計檢驗方法確保所建模型的置信度和模型精度。
如圖1所示,艦船磁場可用1個均勻磁化的旋轉橢球體和 1列磁偶極子所組成的混合模型所產生的磁場來擬合。旋轉橢球體位于艦船吃水面的中心x=0處,長軸2a為艦船長度LS,短軸2b為艦寬WS;1列N-1個磁偶極子均勻布放于艦船吃水面中線上,布放間隔d取為船寬。
布放間隔d為

磁偶極子個數為

2 考慮航向變換時的模型
2.1 考慮航向變換時艦船磁場建模
在一定的時間內,固定磁性可視為不變,感應磁性,其大小和方向隨當地磁場的數值而成比例地變化。所以可以把旋轉橢球體或磁偶極子模型的磁矩分解為固定磁矩和感應磁矩進行研究。
根據式(3),利用艦船磁場的測量數據,采用回歸方法求解模型參數,得到艦船磁場的單航向模型。
其中每一個旋轉橢球體或磁偶極子的解法為
利用式(4)建立關于磁矩的線性方程組如下:

方程(5)有3個變量,3×n×m個方程,屬超定方程,一般用最小二乘法求解。為了用最小二乘法求解方程(4),將下標重排,下標重排規則為(11,12,…,1m,21,22,…,2m,…,n1,n2,…,nm,)=(1,2,…,K)其中K=n×m為測量點數目。

方程(5)的最小二乘問題可用以下方程表示:

由式(7)得到式(8):
式(8)就是方程(4)的最小二乘解,由此計算出磁矩后便可利用式(3)計算出邊界面下方任意點的艦船磁場。
如果要求得運動艦船模型,需要把艦船磁場分解成固定分量和感應分量,艦船磁場的模型磁矩也可分解成固定磁矩和感應磁矩,即:

已知,艦船在航行過程中,由于受地磁場感應磁化而形成的感應磁性,其大小和方向隨當地磁場的數值而成比例地變化,所以縱軸方向感應磁矩可表示為地磁場縱向方向與比例系數之積。

式中:Kxi為縱軸方向感應磁化系數;BH為地磁場的水平分量;ψ為磁航向角。
將式(10)代入式(9)得到:

同理可以得到方程:
式中:Kyi、Kzi分別為橫向方向和垂直方向的感應磁化系數;分別為橫向方向和垂直方向的固定磁矩。這里很顯然,BH、ψ均為已知量,只要有2組數據就可以解算出Kxi、Kyi和。由于艦船在橫向方向與垂直方向的體積相似,故磁化系數可以近似代替,即:Kzi=Kyi。
于是式(12)可以改寫成:

利用 2組模型磁矩參數就可以解算出以上方程的所有參數,利用多組模型磁矩參數平均計算可提高精度。
計算出磁矩后便可利用式(3)計算出邊界面下方任意點的艦船磁場。從而得到不同航向上運動艦船的磁場的數學模型。
2.2 運動艦船數學模型計算分析
采用模型艦船的實際磁場數據進行運動艦船數學模型計算分析。艦船磁場分析軟件應用線性回歸的方法進行旋轉橢球體與磁偶極子混合建模,采用14個磁偶極子與1個旋轉橢球體來模擬艦船磁場。分別得到4組相互正交的航向上磁矩數據。分別為北(N)、東(E);北(N)、西(W);東(E)、南(S);西(W)、南(S)4組數據。求解,得到4×15 組模型參數Mx、My、Mz。
模型驅逐艦的數據為船長Ls=132 m,船寬Ws=10.8 m,測量深度分別為Z=13 m和Z=22.3 m,其數據點分布見圖2。
利用2.1節中描述的方法,求解得到的磁矩方程參數如圖3所示。圖中僅列出Z=13 m時的情況,Z=22.3 m時結果類似。

圖2 艦船磁場測量數據點分布Fig.2 Distribution of measurement data points of ship magnetic field
從4組數據計算出來的參數由15個點組成,從圖3-4可以看出其變化趨勢相同。要注意的是:圖3-4中,參數值最后一組值的參數是旋轉橢球體模型參數數據,其x、y軸方向感應磁化系數,x軸方向固定磁矩都明顯大于前面14組偶極子模型參數數據。14個磁偶極子數據得到的x軸方向固定和感應磁矩、y軸方向感應磁化系數參數組變化趨勢基本相同,有一定的誤差,這是由于磁場測量是有一定的誤差所引起的。由于初始計算的4組數據是不相關的4個方向數據的正交組合,所以計算結果表明了算法的穩定性。利用多組模型磁矩參數平均計算得到更精確的參數。

圖3 X軸與Y軸的固定磁矩與磁化系數(15個模型點;Z=13 m)Fig.3 Fixed magnetic moments and susceptibilitys of X-axis and Y-axis(15 model points;Z=13 m)
將計算得到參數組期望值代入式(13),可得磁矩參數值Mx、My、Mz的解算方程,可計算固定緯度任意航向的艦船磁場,使用模型得到北航向艦船磁場反演數據與測量演算數據進行對比,得到的對比圖如圖4所示。
從圖中可以看出,反演數據與測量演算數據有較好的一致性,可進一步計算相對標準偏差來分析數據精度,采用下式進行計算:
在水深為13 m處測量時計算結果為5.74%,當水深為22.3 m時,相對標準偏差為10.6%,總體精度較高,證明了所建模型的有效性。
3 考慮緯度變換時的模型
在上一節的分析中,得到了考慮航向變化時的艦船磁場數學建模的關鍵方程為式(13),在方程中引入了磁航向ψ,可以利用方程估算任意航向的艦船磁矩參數,然后利用式(3)解算出艦船的磁場。觀察式(12),不難發現BH、BZ已經引入了緯度信息,設θ為艦船航行地區的緯度,可以將式(12)改寫成為
式中θ為艦船航行的緯度。如果知道相同艦船不同緯度磁場測量值是可以計算出Kzi的,故式(13)可以回歸到:

表1 4組數據得到的磁化系數期望值(Z=13 m)Table 1 Expected values of magnetization coefficient from 4 sets of data(Z=13 m)
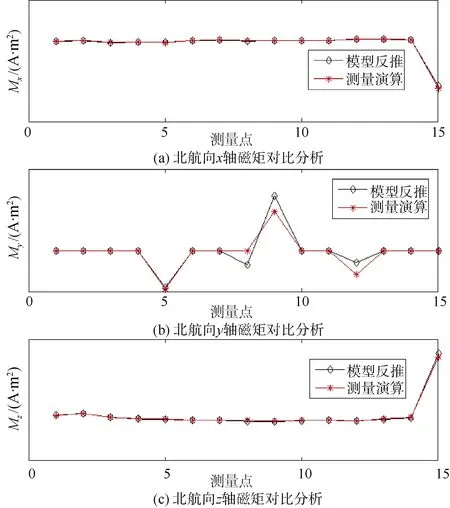
圖4 北航向模型反演數據與測量數據對比(15個模型點;Z=13 m)Fig.4 Comparison of northward direction model's inversion data and measurement data(15 model points;Z=13 m)
4 結束語
本文圍繞運動艦船磁場數學建模問題展開研究,分析了艦船磁場的產生來源,將艦船磁場模型參數分為固定磁矩與感磁磁矩,運動艦船磁場數學建模問題主要是針對感磁磁矩進行建模。研究了考慮航向變化和緯度變化時艦船磁場的數學建模問題,采用4個航向的實船數據對建立的數學模型進行了驗證,證明了算法的穩定性。分析了現有感應磁場測量方法,并根據磁場測量值得到艦船磁場的計算值,在4個主要磁航向上把艦船磁場感應測量值與艦船磁場計算值進行比較,得出在 4個主要磁航向上進行測量時誤差達到最小值的結論,并進一步證明本文提出的運動磁場數學建模的合理性。
與單一航向的艦船磁場建模方法相比,同時建立 4個不同航向的主要困難在于要保證用不同航向測量數據獨立解出的4組數據必須相容,由此才能解出感應磁矩和固定磁矩。由于采用等效源方法,最后用最小二乘法來進行計算,所得到的解一般是局部最優解。難以保證獨立解出的4組參數相容。為了克服這一困難,在各航向進行艦船磁場建模時采用0.96高置信度水平F統計檢驗方法對模型參數進行了檢驗。并對測量數據選取和等效源陣列布設進行了優化,有效保證了不同磁化狀態下模型參數求解結果的相容性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
華人時刊(2020年13期)2020-09-25 08:21:42
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年1期)2016-01-11 16:53:24
