行星減速器動態(tài)特性的響應(yīng)面近似建模方法研究
2019-08-30 01:56:18楊正龍
制造業(yè)自動化 2019年8期
關(guān)鍵詞:模型
楊正龍,陳 娟,康 洪,楊 為
(1.中國北方車輛研究所車輛傳動重點(diǎn)實(shí)驗(yàn)室,北京 100072;2.重慶大學(xué) 機(jī)械傳動國家重點(diǎn)實(shí)驗(yàn)室,重慶 400044)
0 引言
多級行星傳動系統(tǒng)具有多自由度、多間隙等特點(diǎn),在嚙合過程時齒輪副的彈性變形、時變嚙合剛度和制造誤差等都會對齒輪動態(tài)系統(tǒng)產(chǎn)生很大影響,影響了行星減速器在運(yùn)轉(zhuǎn)過程中的平穩(wěn)性、安全性[1]。因此,行星減速器動態(tài)特性研究引起了國內(nèi)外學(xué)者的廣泛關(guān)注。李潤芳[2]等運(yùn)用有限元的方法建立了齒輪系的動力學(xué)仿真模型,通過對比實(shí)驗(yàn)和仿真結(jié)果來研究內(nèi)部激勵下的傳動系統(tǒng)動態(tài)特性;劉文吉[3]等采用有限元法建立了漸開線少齒差模型,分析了動態(tài)齒輪的接觸特性,得到了完整嚙合周期的齒面接觸應(yīng)力、齒面滑動位移等嚙合特性參數(shù)。
響應(yīng)面法以多項(xiàng)式超曲面近似描述個變量之間的關(guān)系[4,5],形式簡單、計(jì)算方便,因此本文提出了基于響應(yīng)面法建立行星減速器的動力學(xué)模型,以行星減速器的特征參數(shù)作為變量,以減速器表面的最大加速度為目標(biāo)函數(shù),建立了行星減速器動力學(xué)特性與特征參數(shù)之間的關(guān)系,有助于深入研究行星減速器的動力學(xué)特性。
1 試驗(yàn)水平和試驗(yàn)指標(biāo)
某多級行星減速器主要由太陽輪、行星輪、齒圈、行星架以及箱體組成,其有限元模型如圖1所示。在運(yùn)轉(zhuǎn)過程中,為了提高其承載力以及使用壽命,通常將太陽輪、行星輪、內(nèi)齒圈進(jìn)行正角度變位,這將避免跟切,減少齒面磨損,且能消除不變位的太陽輪與行星輪及內(nèi)齒輪之間嚙合的同心條件限制,綜合考慮目標(biāo)函數(shù)和約束條件的要求,選取太陽輪齒數(shù)zs,行星輪齒數(shù)zp,內(nèi)齒圈齒數(shù)zr,太陽輪變位系數(shù)xs,行星輪變位系數(shù)xp,內(nèi)齒圈變位系數(shù)xr,模數(shù)m和齒寬b。故此8個設(shè)計(jì)變量可表示為:

圖1 行星減速器有限元模型

行星輪系不等角變位的方法是在太陽輪和內(nèi)齒圈的齒數(shù)不變,而將行星輪的齒數(shù)減少1~2的情況下實(shí)現(xiàn)的。對于不變位或高變位行星輪系中各齒輪齒數(shù)的關(guān)系為:zp=(zr-zs)/2,而傳動比和裝配條件又只與太陽輪和內(nèi)齒圈的齒數(shù)有關(guān)。因此,可以在滿足傳動比和裝配條件的情況下,先確定zr和zs,然后按不變位的情況確定zp,再將減少1~2個齒數(shù),若傳動比保持不變,則齒數(shù)僅有一個是獨(dú)立的,變位系數(shù)中僅有兩個是獨(dú)立的,此時的設(shè)計(jì)變量為:

本文研究中試驗(yàn)設(shè)計(jì)工況為:輸入轉(zhuǎn)矩為4354.8N·m,輸入轉(zhuǎn)速為996.4rpm,功率為454Kw。結(jié)合研究對象和研究目的,分別將傳動系統(tǒng)的最大應(yīng)力和加速度作為試驗(yàn)的兩個指標(biāo);進(jìn)行試驗(yàn)時,需指定試驗(yàn)因素的取值范圍,即可行的試驗(yàn)空間。對于行星齒輪傳動,將傳動系統(tǒng)齒輪參數(shù)的變化范圍作為試驗(yàn)空間。表1為本次試驗(yàn)的試驗(yàn)空間。
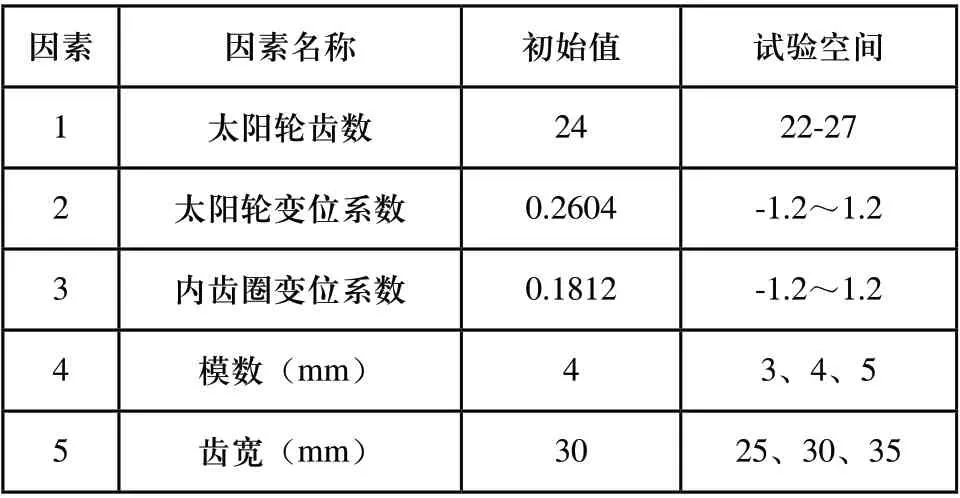
表1 試驗(yàn)因素及試驗(yàn)空間
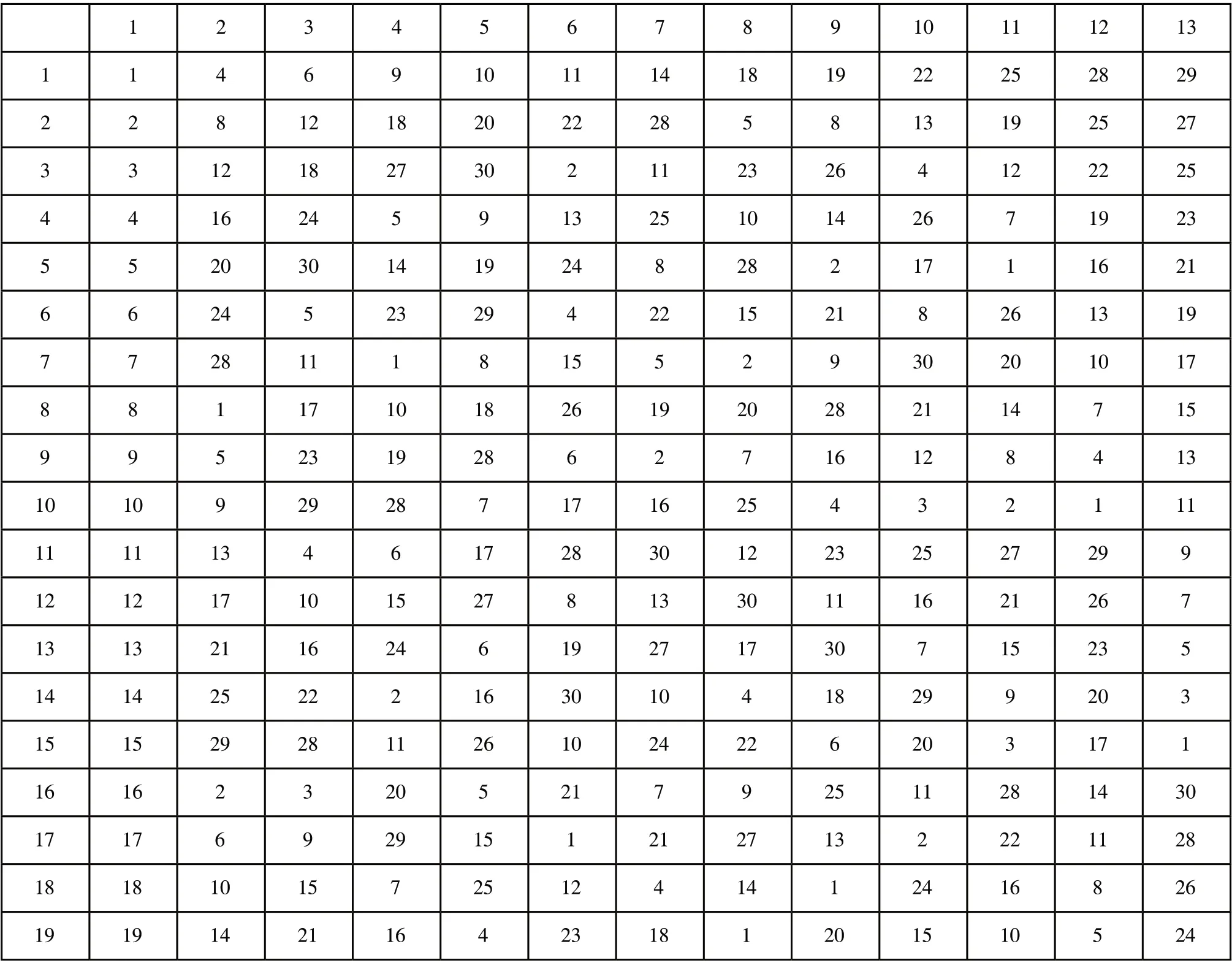
表2 U30×(3013)均勻表及使用表
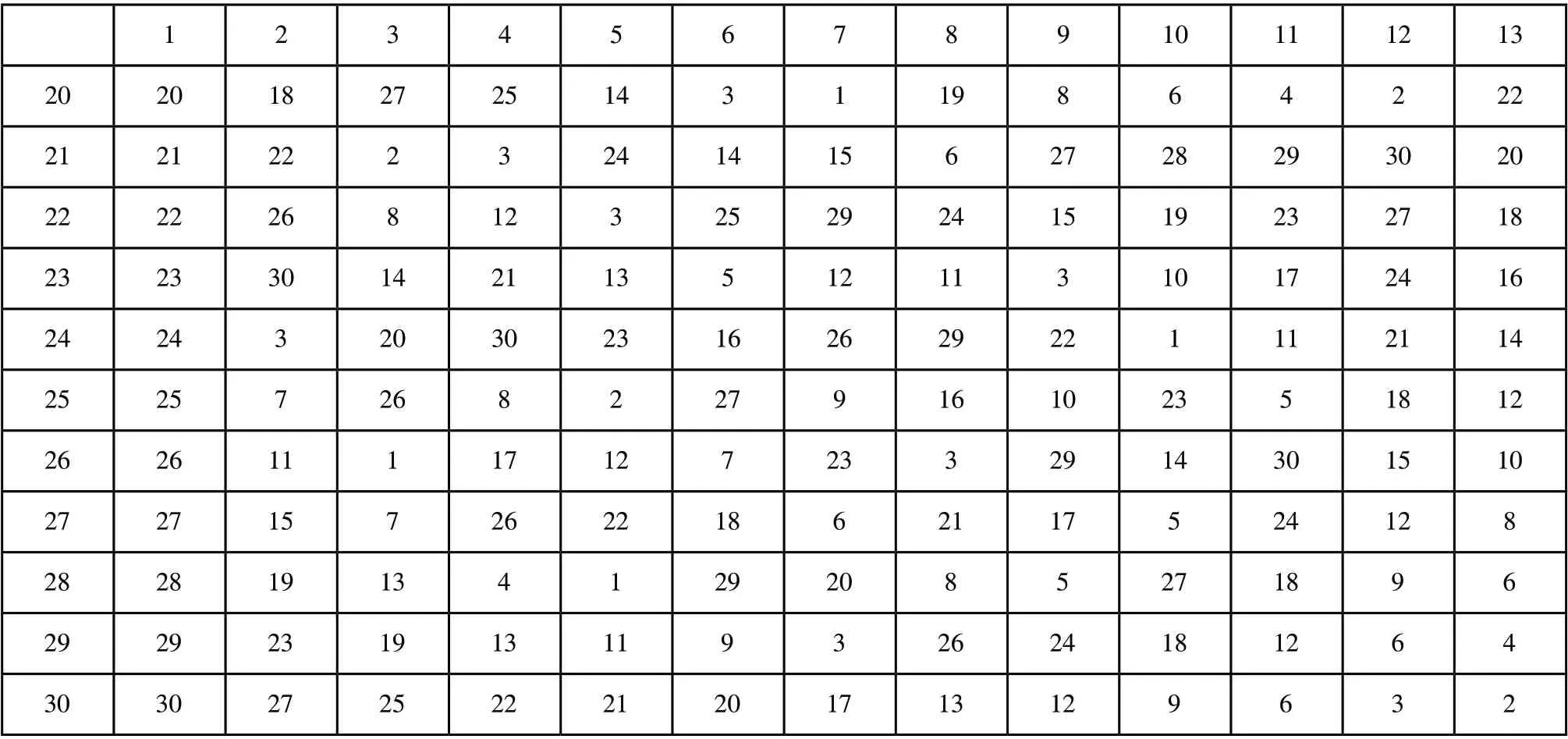
表2(續(xù))
研究中涉及的試驗(yàn)因素有5個,根據(jù)均勻設(shè)計(jì)表,能安排5因素的試驗(yàn)方案有很多種。在均勻試驗(yàn)中,試驗(yàn)次數(shù)可以等于最大水平數(shù),而試驗(yàn)次數(shù)與試驗(yàn)因數(shù)個數(shù)有關(guān),一般來說,試驗(yàn)次數(shù)選為試驗(yàn)因素個數(shù)的3倍左右為宜,有利于建模和優(yōu)化[6]。在本試驗(yàn)中,考慮到每個因素的取值范圍較大,適當(dāng)?shù)卦黾釉囼?yàn)次數(shù)有助于保證試驗(yàn)的精確性及提高響應(yīng)面精度。
根據(jù)表2中的試驗(yàn)空間可知,本次試驗(yàn)各試驗(yàn)因素水平不同,故需采用混合均勻?qū)嶒?yàn)設(shè)計(jì)表,項(xiàng)目研究中在30水平的均勻表的基礎(chǔ)上,將其變?yōu)槲逡蛩鼗旌显O(shè)計(jì)表。30水平的均勻設(shè)計(jì)表有U30×(3013)及其使用表如表2所示[7,8]。五因素試驗(yàn)的均勻度偏差為0.1465,試驗(yàn)時應(yīng)按照均勻設(shè)計(jì)表中的第1、2、5、7和8列進(jìn)行試驗(yàn)設(shè)計(jì)。
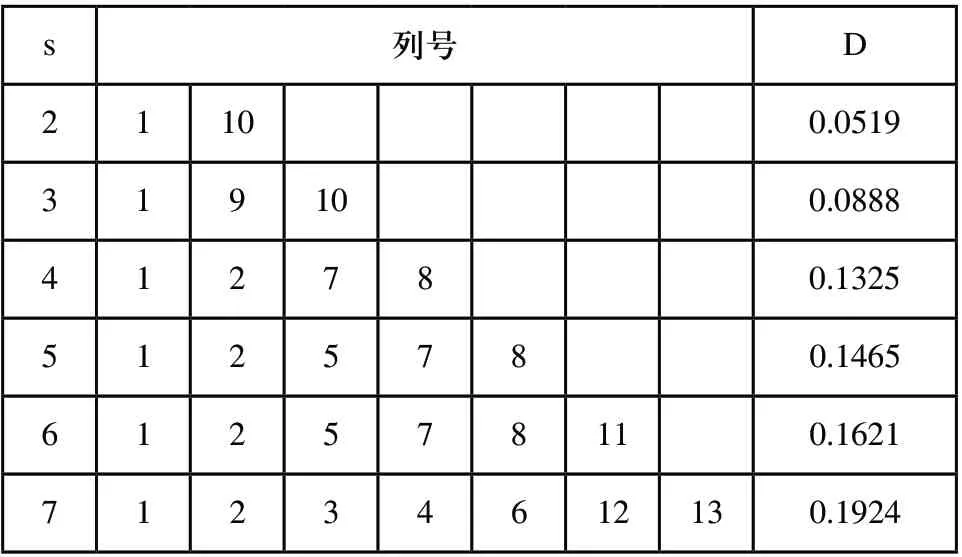
表3 U30×(3013)的使用表
建立的試驗(yàn)設(shè)計(jì)方案如表4所示。
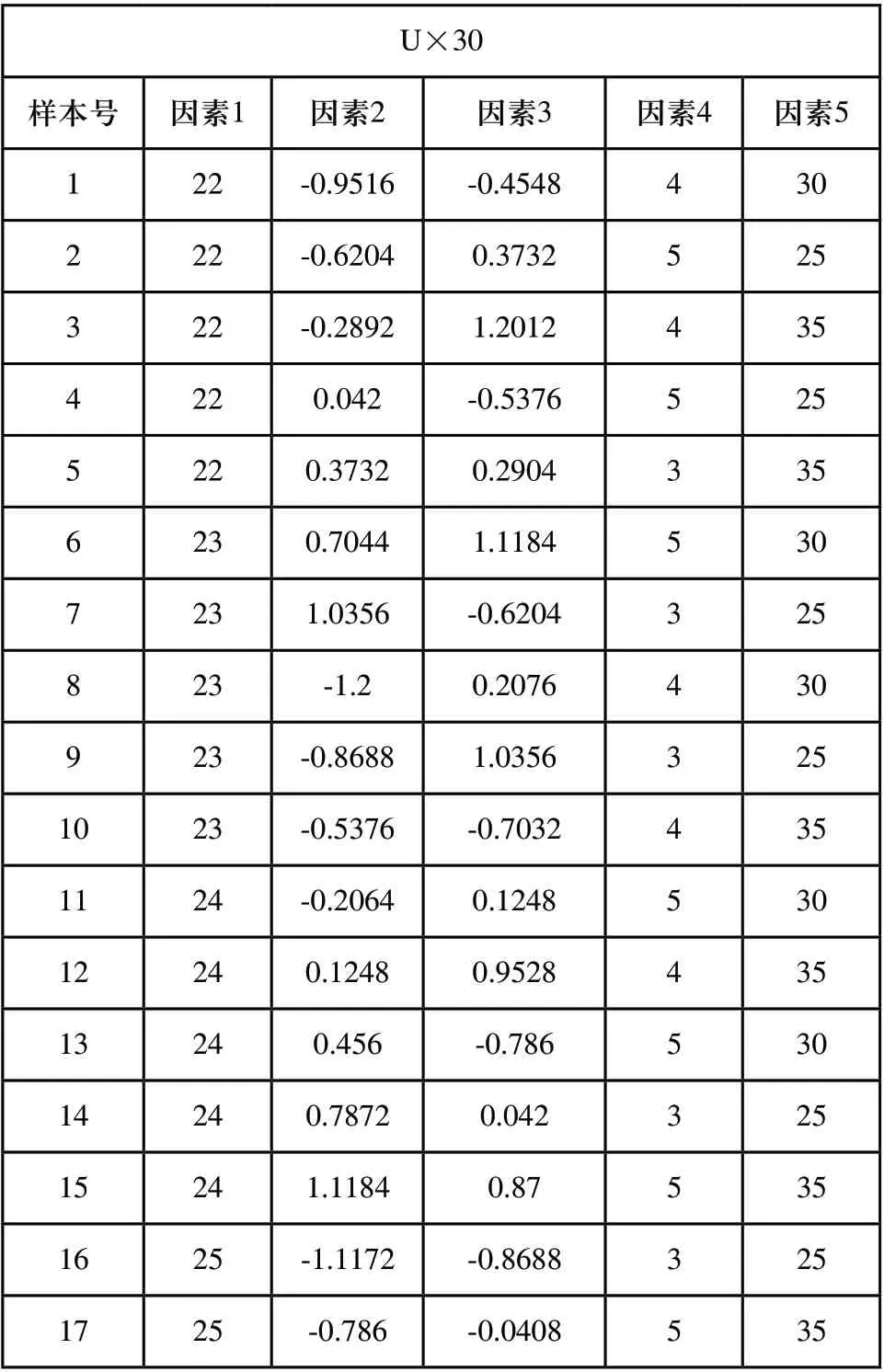
表4 試驗(yàn)設(shè)計(jì)方案
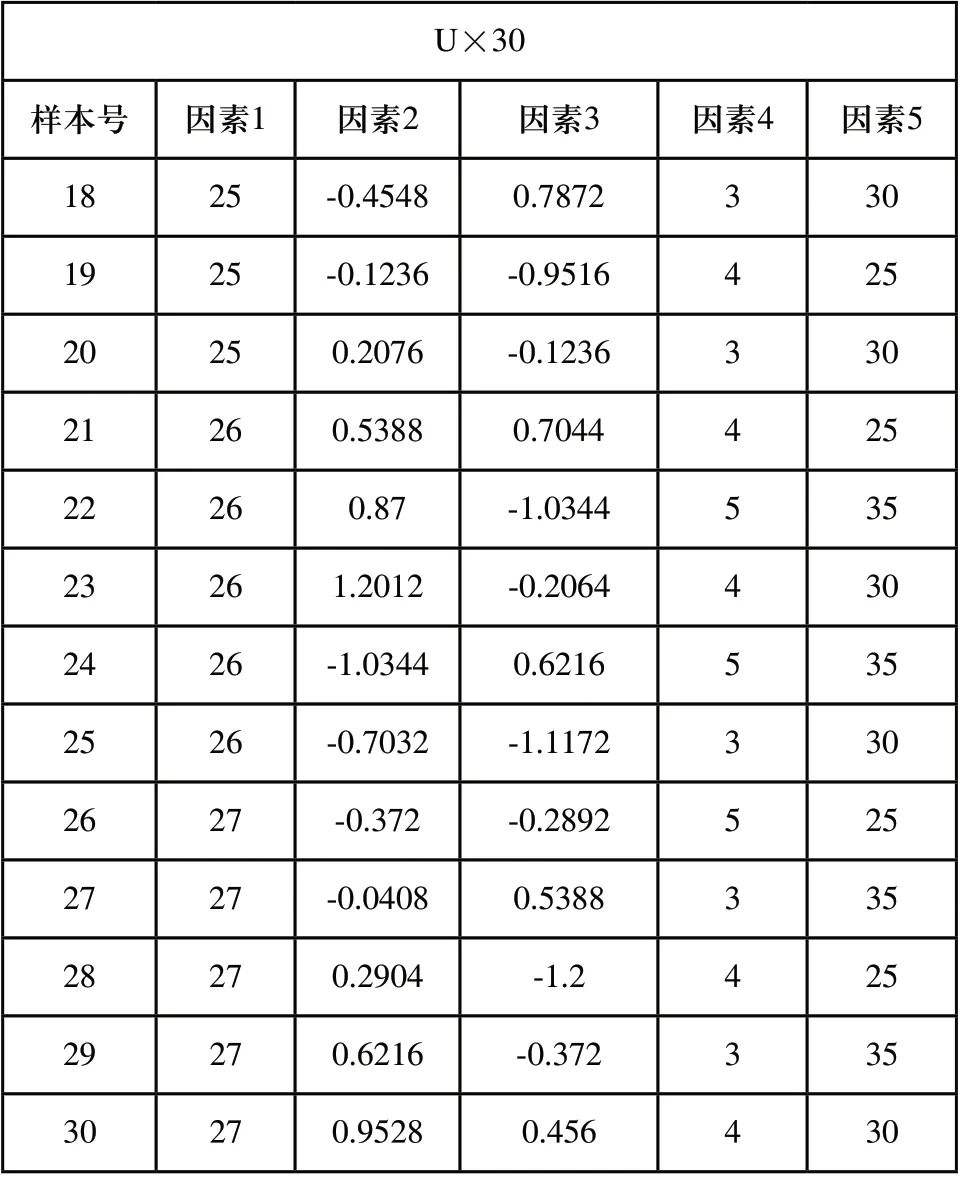
表4(續(xù))
2 響應(yīng)面模型
對設(shè)計(jì)變量和動態(tài)特性響應(yīng)采用最小二乘法擬合,得到傳動系統(tǒng)動態(tài)特性中表面最大應(yīng)力Ystr和加速度Ya的二次多項(xiàng)式響應(yīng)面近似模型,響應(yīng)面擬合系數(shù)如表5和表6所示。
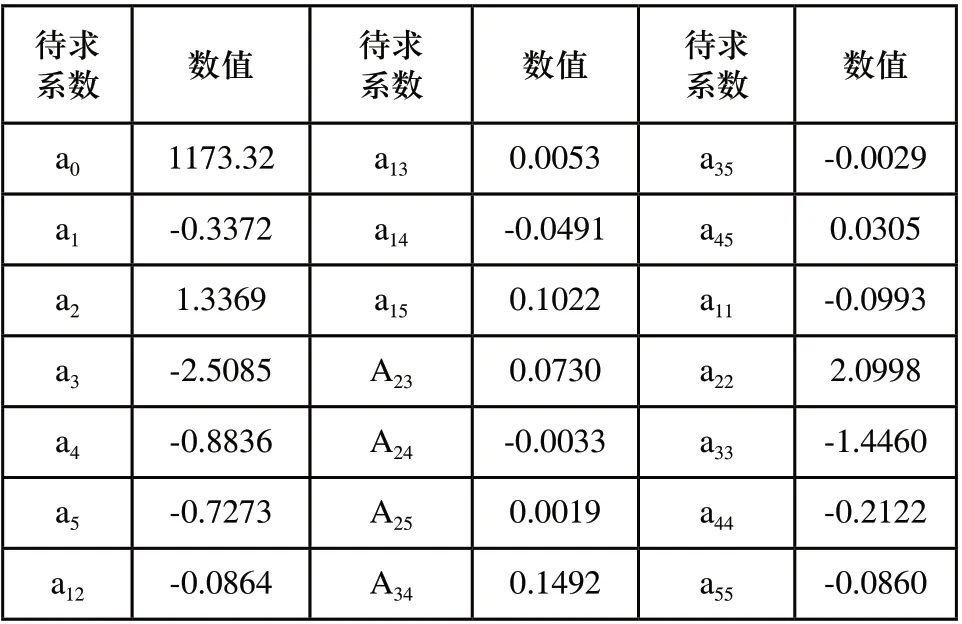
表5 傳動系統(tǒng)表面最大應(yīng)力響應(yīng)面擬合系數(shù)
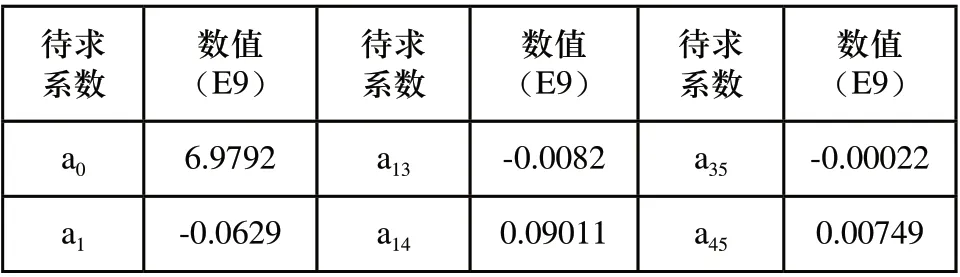
表6 傳動系統(tǒng)表面最大加速度響應(yīng)面擬合系數(shù)
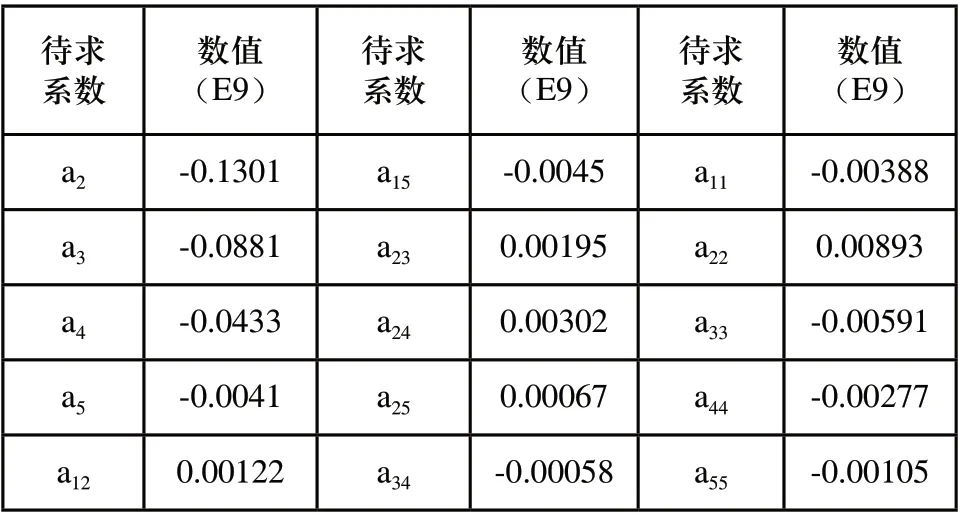
表6(續(xù))
3 近似響應(yīng)面模型結(jié)果分析
1)誤差分析
為了進(jìn)一步判斷響應(yīng)面近似模型對真實(shí)響應(yīng)面的逼近程度,需對擬合的二次響應(yīng)面近似模型進(jìn)行精確度檢驗(yàn)。復(fù)相關(guān)系數(shù)R2和修正復(fù)相關(guān)系數(shù)R2adj常作為響應(yīng)面模型精度的評價(jià)指標(biāo)[9~11],它們的計(jì)算結(jié)果如表7所示。兩個響應(yīng)面近似模型的復(fù)相關(guān)系數(shù)和修正復(fù)相關(guān)系數(shù)都大于0.9,滿足工程精度要求,擬合得到的近似響應(yīng)面模型精確可靠。

表7 響應(yīng)面近似模型的復(fù)相關(guān)系數(shù)和修正復(fù)相關(guān)系數(shù)
2)結(jié)果分析及討論

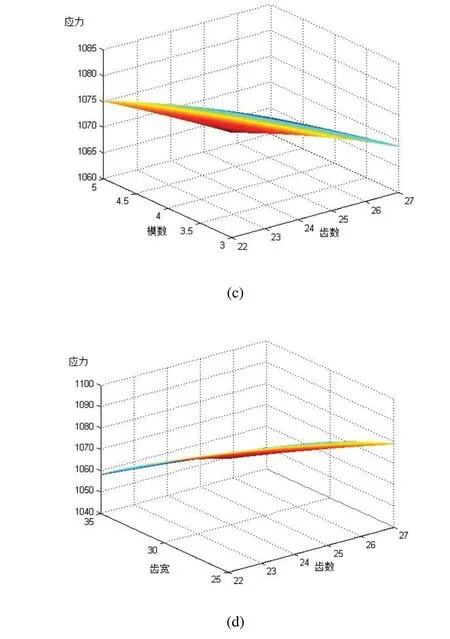
圖2 基于系統(tǒng)應(yīng)力的二次響應(yīng)面交互項(xiàng)曲面
如圖2所示,太陽輪齒數(shù)和太陽輪變位系數(shù)的交互項(xiàng)曲面為一個凸曲面,在一定范圍內(nèi),當(dāng)太陽輪齒數(shù)不變時,極限應(yīng)力隨著內(nèi)齒圈變位系數(shù)的增大先增大后減小;太陽輪齒數(shù)和內(nèi)齒圈變位系數(shù)的交互項(xiàng)曲面為一個凹曲面,極限應(yīng)力隨著太陽輪變位系數(shù)的增大先減小后增大;極限應(yīng)力隨著齒輪模數(shù)和齒寬的增大而減小,且模數(shù)和齒寬與太陽輪齒數(shù)的交互作用對系統(tǒng)應(yīng)力影響較大。
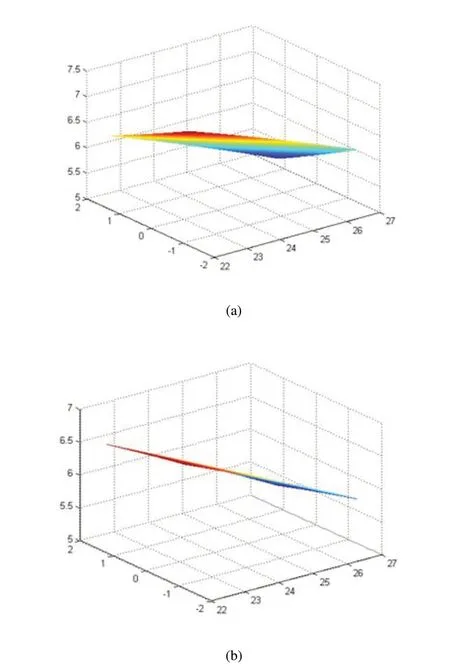

圖3 基于系統(tǒng)加速度的二次響應(yīng)面交互項(xiàng)曲面
如圖3所示,太陽輪變位系數(shù)和內(nèi)齒圈變位系數(shù)不變時,太陽輪齒數(shù)在較大值處系統(tǒng)加速度響應(yīng)較小。模數(shù)和太陽輪齒數(shù)的交互作用以及齒寬和太陽輪齒數(shù)的交互作用對系統(tǒng)加速度響應(yīng)影響較大,且在二者較大值附近,系統(tǒng)加速度響應(yīng)最優(yōu)。
4 結(jié)論
建立了減速器傳動系統(tǒng)和箱體表面最大應(yīng)力和最大加速度的二次多項(xiàng)式響應(yīng)面近似模型,得到了行星傳動系統(tǒng)特征參數(shù)與系統(tǒng)動態(tài)特性間的映射關(guān)系,得到的主要結(jié)論有:
1)當(dāng)太陽輪齒數(shù)不變時,極限應(yīng)力隨著內(nèi)齒圈變位系數(shù)的增大先增大后減小;太陽輪齒數(shù)和內(nèi)齒圈變位系數(shù)的交互項(xiàng)曲面為一個凹曲面,極限應(yīng)力隨著太陽輪變位系數(shù)的增大先減小后增大;極限應(yīng)力隨著齒輪模數(shù)和齒寬的增大而減小,且模數(shù)和齒寬與太陽輪齒數(shù)的交互作用對系統(tǒng)應(yīng)力影響較大。
2)太陽輪變位系數(shù)和內(nèi)齒圈變位系數(shù)不變時,太陽輪齒數(shù)在較大值處系統(tǒng)加速度響應(yīng)較小。模數(shù)和太陽輪齒數(shù)的交互作用以及齒寬和太陽輪齒數(shù)的交互作用對系統(tǒng)加速度響應(yīng)影響較大,且在二者較大值附近,系統(tǒng)加速度響應(yīng)最優(yōu)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
