基于MATLAB的HP20D機(jī)器人運(yùn)動(dòng)學(xué)分析與仿真
2019-08-30 01:55:36馬國(guó)慶于正林曹?chē)?guó)華范師杰
制造業(yè)自動(dòng)化 2019年8期
關(guān)鍵詞:模型
馬國(guó)慶,劉 麗,于正林,曹?chē)?guó)華,范師杰
(長(zhǎng)春理工大學(xué) 機(jī)電學(xué)院,長(zhǎng)春 130022)
0 引言
機(jī)器人的運(yùn)動(dòng)學(xué)分析是機(jī)器人學(xué)的一個(gè)重要組成部分,為機(jī)器人的動(dòng)力學(xué)分析、軌跡規(guī)劃和運(yùn)動(dòng)控制提供重要依據(jù)[1]。本文使用經(jīng)典D-H法對(duì)HP20D型六自由度工業(yè)機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)分析,并用MATLAB進(jìn)行運(yùn)動(dòng)學(xué)的仿真與方程計(jì)算,通過(guò)數(shù)據(jù)對(duì)比驗(yàn)證了其運(yùn)動(dòng)學(xué)模型與運(yùn)動(dòng)學(xué)正逆運(yùn)算的正確性。為機(jī)器人進(jìn)行軌跡規(guī)劃研究與仿真提供了必要的理論基礎(chǔ)和正確的運(yùn)動(dòng)學(xué)模型。
1 機(jī)器人結(jié)構(gòu)分析及數(shù)學(xué)模型建立
1.1 結(jié)構(gòu)分析
工業(yè)機(jī)器人主要由機(jī)身主體、驅(qū)動(dòng)系統(tǒng)和控制系統(tǒng)三部分組成[2]。機(jī)身主體即機(jī)座與執(zhí)行機(jī)構(gòu),包括臂部、腕部和手部;驅(qū)動(dòng)系統(tǒng)涵蓋動(dòng)力裝置與傳動(dòng)機(jī)構(gòu),負(fù)責(zé)為機(jī)身主體提供動(dòng)力輸出與傳輸;控制系統(tǒng)負(fù)責(zé)按照輸入的命令及程序?qū)︱?qū)動(dòng)系統(tǒng)與執(zhí)行機(jī)構(gòu)發(fā)出信號(hào),并進(jìn)行控制[3]。工業(yè)機(jī)器人的有效工作范圍、重復(fù)定位精度、荷載以及允許扭矩是評(píng)判機(jī)器人工作能力的重要參數(shù)。HP20D型工業(yè)機(jī)器人為六自由度垂直多關(guān)節(jié)型機(jī)器人,末端最大負(fù)載為20kg,重復(fù)定位精度為±0.06mm,但由于機(jī)器人制造導(dǎo)致的模型誤差和日常工作產(chǎn)生的磨損,其定位精度在幾毫米左右,可以通過(guò)標(biāo)定技術(shù)來(lái)提高精度[4]。
1.2 機(jī)器人數(shù)學(xué)基礎(chǔ)
機(jī)器人可簡(jiǎn)化成由一系列桿件串聯(lián)而成,將坐標(biāo)系置于每一連桿的關(guān)節(jié)中心處,則可用齊次坐標(biāo)變換對(duì)這些坐標(biāo)系之間的位姿進(jìn)行數(shù)學(xué)表述[5]。
1.2.1 工業(yè)機(jī)器人的位姿描述
1)位置描述
在空間直角坐標(biāo)系{A}中的任意一點(diǎn)P的位置可用一個(gè)(3×1)的位置矢量AP來(lái)表示:
其中,px、py、pz為點(diǎn)P的三個(gè)位置坐標(biāo)分向量,AP稱為位置矢量。
2)姿態(tài)描述
可通過(guò)在物體質(zhì)心或者中心上固定一個(gè)坐標(biāo)系,并給出此坐標(biāo)系相對(duì)于參考坐標(biāo)系的數(shù)學(xué)表達(dá)來(lái)描述物體的姿態(tài)[6]。定義直角坐標(biāo)系{B},將剛體B的質(zhì)心或者中心定義為坐標(biāo)系{B}的原點(diǎn),則可以用一個(gè)(3×3)的旋轉(zhuǎn)矩陣ARB來(lái)表示剛體B相對(duì)于坐標(biāo)系{A}的姿態(tài):
ARB是一個(gè)正交矩陣,稱為旋轉(zhuǎn)矩陣,上標(biāo)A表示參考坐標(biāo)系{A},下標(biāo)B表示被描述坐標(biāo)系{B}。
3)位姿描述
點(diǎn)的位置信息可用位置矢量來(lái)表述,物體的姿態(tài)可用旋轉(zhuǎn)矩陣來(lái)表述,那么物體的位姿可由坐標(biāo)系{B}來(lái)描述:

其中APB0為坐標(biāo)系{B}的原點(diǎn)位置相對(duì)參考坐標(biāo)系{A}的位置矢量。
1.2.2 坐標(biāo)系映射
在機(jī)器人學(xué)中同一點(diǎn)的位置信息常常需要在不同的參考坐標(biāo)下進(jìn)行描述,因此需要運(yùn)用一種數(shù)學(xué)方法來(lái)表示坐標(biāo)系之間的變換,這就是映射[7]。
設(shè)坐標(biāo)系{B}與坐標(biāo)系{A}的坐標(biāo)原點(diǎn)不重合且姿態(tài)也不相同,用APB0表示坐標(biāo)系{B}的原點(diǎn)OB相對(duì)于坐標(biāo)系{A}的位置矢量,用旋轉(zhuǎn)矩陣ABR表示坐標(biāo)系{B}相對(duì)于坐標(biāo)系{A}的姿態(tài),若點(diǎn)p在坐標(biāo)系{B}中可用BP描述,則它相對(duì)于另一個(gè)坐標(biāo)系{A}的描述AP可按式(4) 求出:

式(4)為坐標(biāo)系平移與旋轉(zhuǎn)的復(fù)合變換,引入一個(gè)過(guò)渡坐標(biāo)系{C},令{C}的坐標(biāo)原點(diǎn)OC與坐標(biāo)系{B}的坐標(biāo)原點(diǎn)OB重合,而{C}的姿態(tài)與{A}相同,如圖1所示,則可得復(fù)合變換:

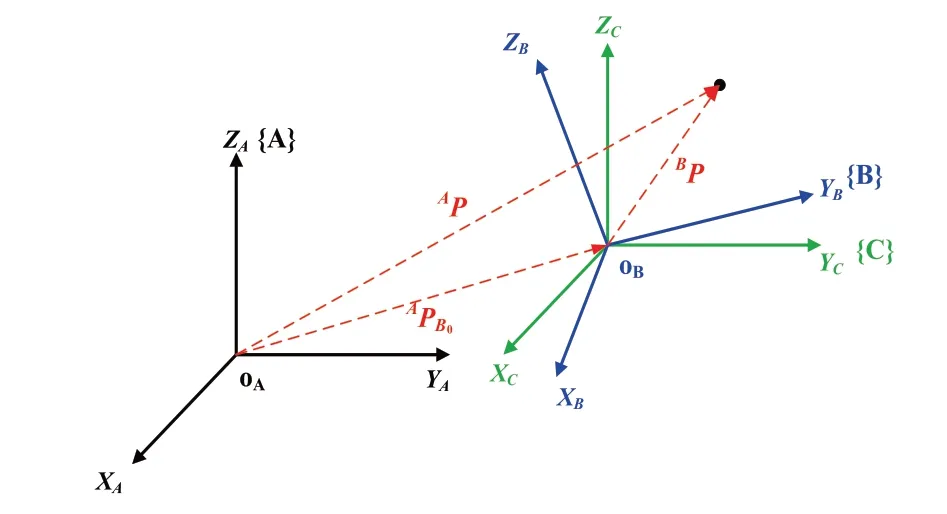
圖1 一般情況下的映射
1.2.3 齊次坐標(biāo)變換
不同的坐標(biāo)系對(duì)空間中任意點(diǎn)p的描述是不同的,利用齊次坐標(biāo)變換可完成點(diǎn)在不同矩陣之間位置關(guān)系的轉(zhuǎn)換,若已知某點(diǎn)在坐標(biāo)系{B}中坐標(biāo)為BP,則該點(diǎn)在坐標(biāo)系{A}中坐標(biāo)AP可表示為:

2 HP20D的運(yùn)動(dòng)學(xué)分析
在機(jī)器人運(yùn)動(dòng)學(xué)求解過(guò)程中,僅研究各桿件之間的運(yùn)動(dòng)關(guān)系并不考慮相互作用力的影響。正運(yùn)動(dòng)學(xué)問(wèn)題是根據(jù)桿件尺寸與各關(guān)節(jié)角,對(duì)機(jī)器人末端執(zhí)行器相對(duì)于基坐標(biāo)系下的位姿進(jìn)行求解,其本質(zhì)是運(yùn)動(dòng)學(xué)方程的建立與求解。而逆運(yùn)動(dòng)學(xué)問(wèn)題正好相反,是根據(jù)末端執(zhí)行器在基坐標(biāo)系下的期望位姿與已知的桿件幾何參數(shù),來(lái)對(duì)機(jī)器人末端執(zhí)行器運(yùn)行到此位姿時(shí)的各個(gè)關(guān)節(jié)角度值進(jìn)行求解[8]。
2.1 連桿坐標(biāo)系建立
根據(jù)D-H坐標(biāo)變換法對(duì)機(jī)器人進(jìn)行建模,可清晰的展示各連桿間的位姿關(guān)系,建模原則如下:
1)繞Zi-1軸旋轉(zhuǎn)θi角,令Xi-1軸同Xi處于同一平面;
2)沿Zi-1軸平移di,令Xi-1軸同Xi處于同一直線;
3)沿Xi軸平移距離ai,將連桿i-1的坐標(biāo)系移動(dòng),令其原點(diǎn)同連桿i的坐標(biāo)系原點(diǎn)重合;
4)繞Xi-1軸旋轉(zhuǎn)ai角,令Zi-1軸旋轉(zhuǎn)到同Zi軸處于一條直線上。
HP20D機(jī)器人D-H坐標(biāo)系如圖2所示。
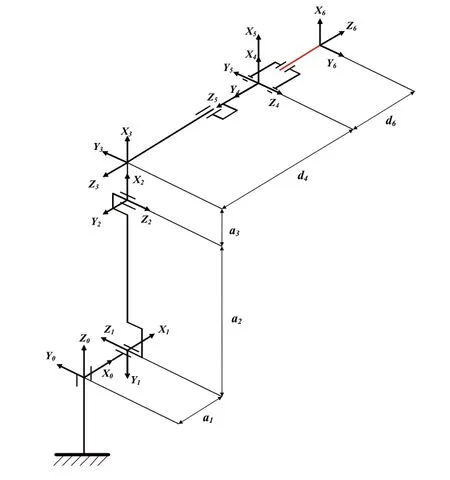
圖2 Motoman-HP20D機(jī)器人D-H坐標(biāo)系
2.2 運(yùn)動(dòng)學(xué)正解
根據(jù)1.2.1中的建模原則即可確定HP20D型機(jī)器人的D-H參數(shù),如表1所示。HP20D為6R型機(jī)器人,因此只有關(guān)節(jié)角θ是變量,連桿長(zhǎng)度α、關(guān)節(jié)扭轉(zhuǎn)α和連桿距離d均是固定值。
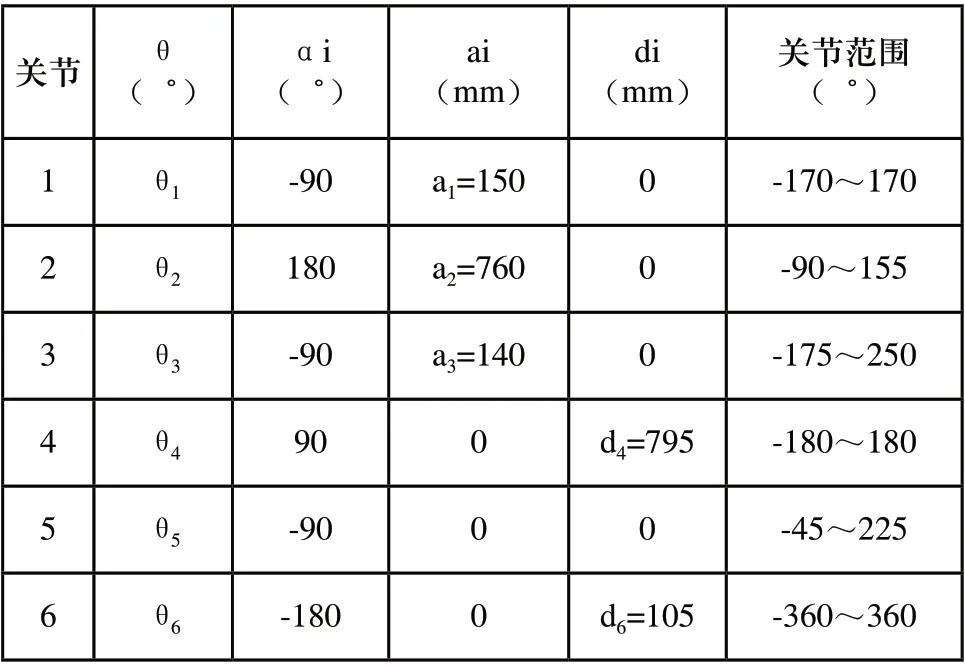
表1 HP20D機(jī)器人的連桿參數(shù)

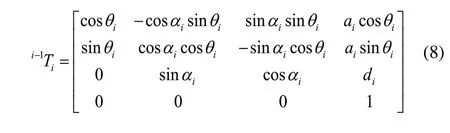
式(7)中Rot 表示旋轉(zhuǎn)變換矩陣,Trans 表示平移變換矩陣。式(7)的矩陣表示形式如下:
根據(jù)相鄰連桿間的坐標(biāo)變換矩陣,可以得到末端坐標(biāo)系相對(duì)于機(jī)器人基坐標(biāo)系的變換矩陣如下:
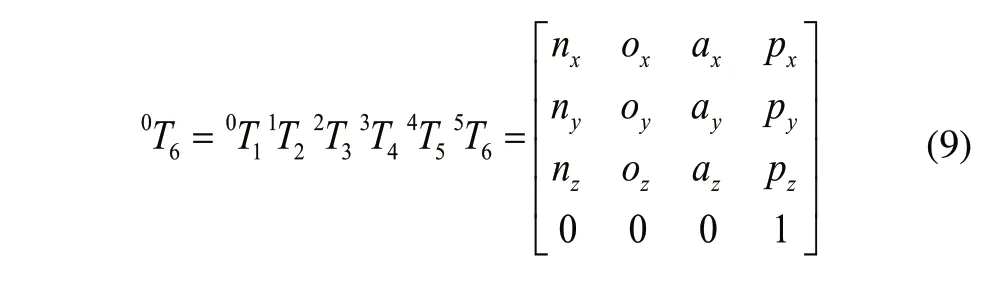
將機(jī)器人的每個(gè)坐標(biāo)轉(zhuǎn)換矩陣代入式(9)即可求出HP20D機(jī)器人的正運(yùn)動(dòng)學(xué)方程。
2.3 運(yùn)動(dòng)學(xué)逆解
采用雙變量正切函數(shù)表示關(guān)節(jié)變量,避免出現(xiàn)解丟失的可能性,得到各個(gè)關(guān)節(jié)角如下:
求解θ1:

求解θ2:

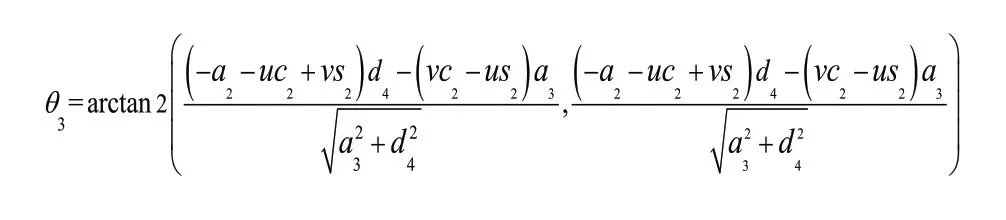
求解θ3:
求解θ5:

求解θ4:
求解θ6:
結(jié)合逆運(yùn)動(dòng)學(xué)求解過(guò)程,再考慮到θ5等于0,或者不等于0兩種情況,同一種末端位姿可以求出8組逆解。但由于機(jī)械參數(shù)的約束,部分逆解處于機(jī)器人的不可達(dá)空間,因此應(yīng)根據(jù)機(jī)器人的運(yùn)動(dòng)情況與可達(dá)空間范圍,確定運(yùn)動(dòng)學(xué)逆解。
3 HP20D機(jī)器人運(yùn)動(dòng)學(xué)模型仿真
3.1 建立運(yùn)動(dòng)學(xué)模型
Robotics Toolbox是MATLAB軟件中的一個(gè)專門(mén)針對(duì)工業(yè)機(jī)器人開(kāi)發(fā)的工具箱,它可以為機(jī)器人提供多種運(yùn)動(dòng)學(xué)函數(shù)。根據(jù)表1提供的數(shù)據(jù),對(duì)HP20D型機(jī)器人進(jìn)行仿真如圖3所示。
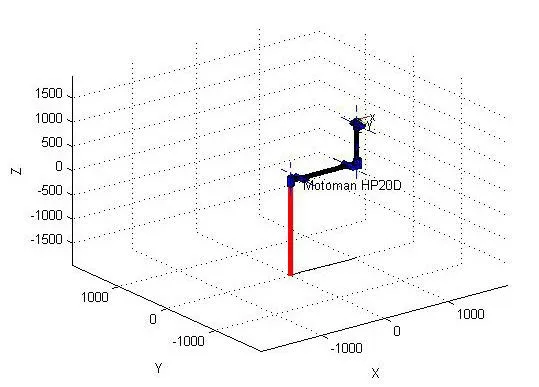
圖3 HP20D機(jī)器人仿真三維圖
3.2 正運(yùn)動(dòng)學(xué)驗(yàn)證
為了驗(yàn)證正運(yùn)動(dòng)學(xué)方程求解的正確性,隨機(jī)選取1組關(guān)節(jié)變量值,將從控制器中讀取機(jī)器人末端執(zhí)行器位姿作為真值;將按照2.2節(jié)中的正運(yùn)動(dòng)學(xué)方程計(jì)算所得的位姿作為計(jì)算值。隨機(jī)選取關(guān)節(jié)變量q1=[-0.3744, 2.7564,-1.2282,-0.6109,-1.5281,-0.3743],將真值與計(jì)算值進(jìn)行數(shù)據(jù)對(duì)比。計(jì)算結(jié)果如表2所示。
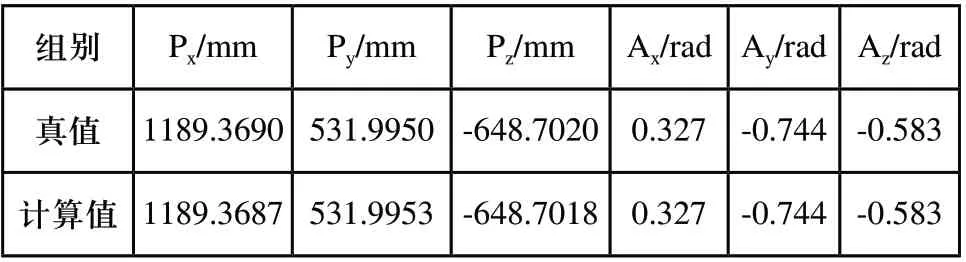
表2 真值與MATLAB計(jì)算值比較
表2中數(shù)據(jù)表明真值和計(jì)算值的誤差很小,證明了機(jī)器人正運(yùn)動(dòng)學(xué)方程與運(yùn)動(dòng)學(xué)模型的正確性。
3.3 逆運(yùn)動(dòng)學(xué)驗(yàn)證
定義機(jī)器人末端位姿W=[PxPyPzaxayaz],將其代入2.3節(jié)機(jī)器人逆運(yùn)動(dòng)學(xué)求解方法可求得機(jī)器人的多組運(yùn)動(dòng)學(xué)逆解Qi=[θ1θ2θ3θ4θ5θ6]。將兩個(gè)末端位姿W1=[-1189.369,531.995,-648.702,0.327, -0.744,-0.583]與W2=[1159.549,-730.090,-745.683, -0.362,0.787,-0.500]代入計(jì)算程序,求得逆解如表3和表4所示。
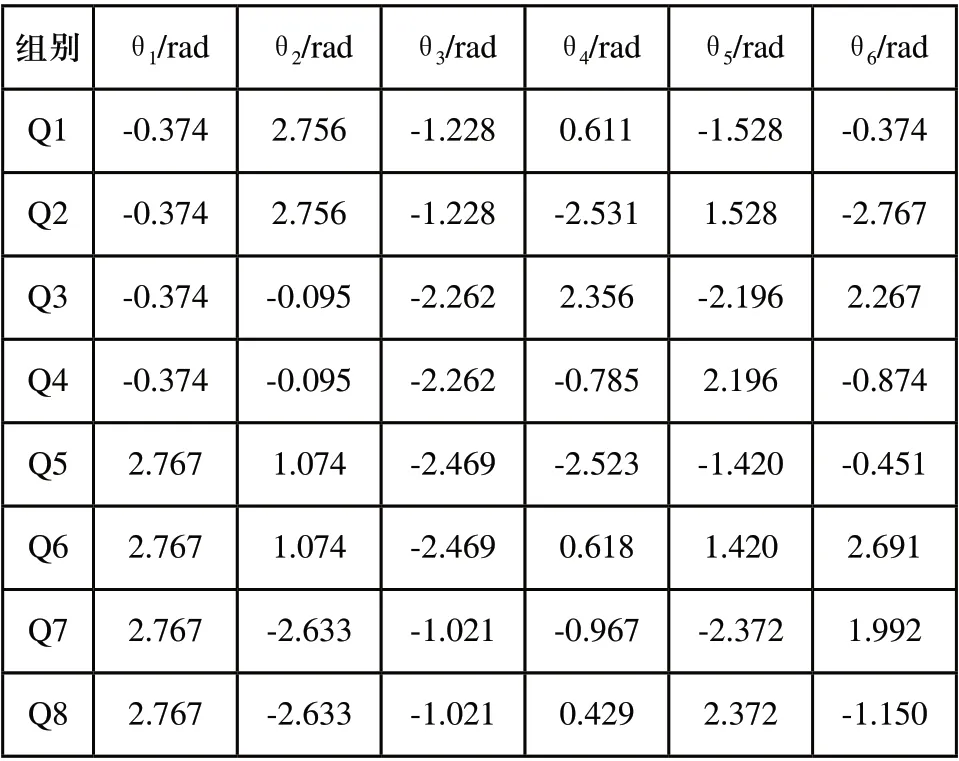
表3 位姿W1的運(yùn)動(dòng)學(xué)逆解
每個(gè)位姿可以獲取8組解,但由于機(jī)械結(jié)構(gòu)約束與各桿件運(yùn)動(dòng)時(shí)的干涉,僅有部分解為機(jī)器人可以真實(shí)達(dá)到的關(guān)節(jié)角度值,位姿W1的有效解為Q1、Q2,位姿W2的有效解為Q1、Q2、Q5、Q6,通過(guò)數(shù)據(jù)對(duì)比可知,表3中的Q1與3.2節(jié)的q1相等,驗(yàn)證了逆運(yùn)動(dòng)學(xué)的正確性。
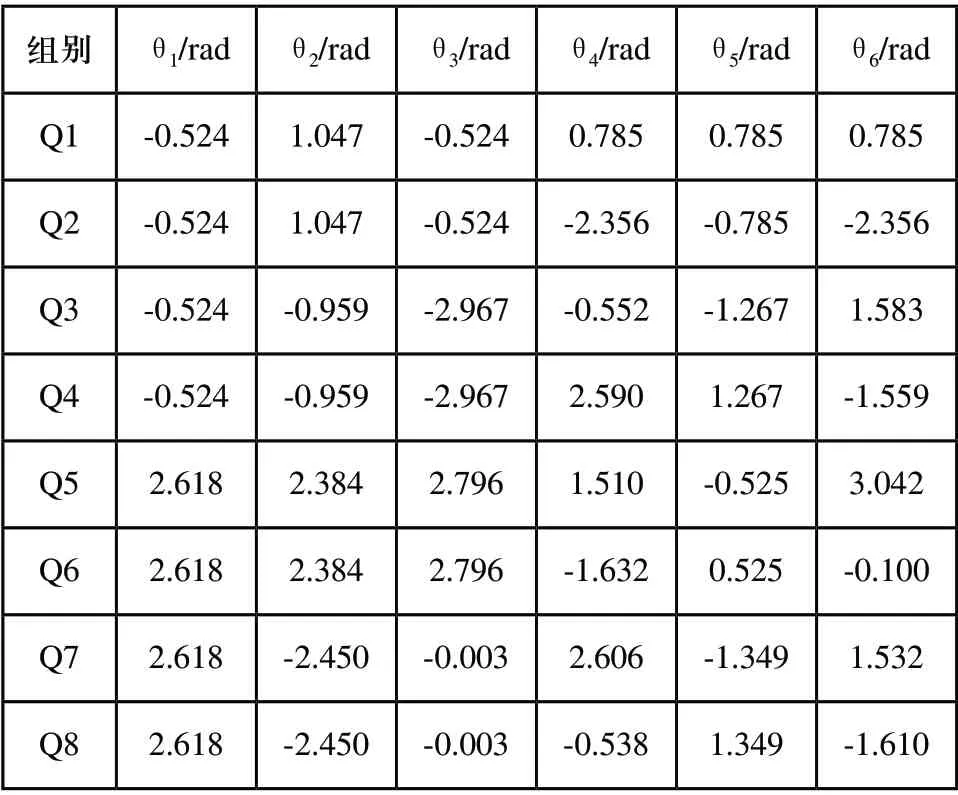
表4 位姿W2的運(yùn)動(dòng)學(xué)逆解
4 結(jié)語(yǔ)
本文在機(jī)器人的數(shù)學(xué)基礎(chǔ)和運(yùn)動(dòng)學(xué)基本知識(shí)的基礎(chǔ)上,以HP20D為研究對(duì)象求取其正解和逆解,并在Robotics Toolbox中進(jìn)行了運(yùn)行學(xué)模型仿真,并通過(guò)數(shù)據(jù)對(duì)比驗(yàn)證了其正運(yùn)動(dòng)學(xué)與逆運(yùn)動(dòng)學(xué)的正確性,為后續(xù)進(jìn)行軌跡規(guī)劃研究與仿真提供了必要的理論基礎(chǔ)和正確的運(yùn)動(dòng)學(xué)模型。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19

- 制造業(yè)自動(dòng)化的其它文章
- RS10系統(tǒng)中的關(guān)于ExtJS框架在開(kāi)發(fā)工具研究與應(yīng)用
- 基于AutoMod的滌綸長(zhǎng)絲自動(dòng)包裝系統(tǒng)仿真及優(yōu)化
- 嵌入式網(wǎng)絡(luò)的遠(yuǎn)程訪問(wèn)控制系統(tǒng)設(shè)計(jì)
- 增程式電動(dòng)汽車(chē)動(dòng)力傳動(dòng)系統(tǒng)設(shè)計(jì)與仿真
- 遺傳算法與模擬退火算法在FMS中的混合應(yīng)用
- 基于BP神經(jīng)網(wǎng)絡(luò)的高鐵彈條熱處理工藝優(yōu)化