某型飛機駕駛桿力測試系統設計
2019-08-31 13:05:26胡寶權許悅
科技與創新 2019年8期
關鍵詞:數據采集
胡寶權 許悅

摘要:傳統的飛機駕駛桿力測試主要通過模擬式儀表來實現,不僅嚴重依賴操作人員的經驗,而且還存在測量精度低、效率差、測量數據得不到有效管理等缺陷。基于此,設計并開發了一套多功能的飛機駕駛桿力測試系統。該系統基于虛擬儀器平臺進行開發,具有數據采集、數據分析、數據顯示和數據保存等能力,為該型飛機的飛行安全提供了有力保障。
關鍵詞:駕駛桿力;虛擬儀器;測試系統;數據采集
中圖分類號:TP277
文獻標識碼:A
DOI:10.1591 3/j .cnki.kj ycx.2019.08.007
飛機駕駛桿是飛控系統的重要組成部分之一,其橫向力和縱向力分別控制飛機的翻滾和俯仰姿態[1]。因此,飛機駕駛桿的穩定性和可靠性直接影響著飛機的飛行安全。飛行員在操縱駕駛桿時,拉桿過大或過猛都有可能導致飛機陷入危險駕駛狀態,飛機的桿力實時檢測對于駕駛員身體的載荷感應,正確操作駕駛桿控制飛機的飛行姿態,提高飛機的可靠性、安全性等起到了非常重要的作用[2]。
受研制條件限制,某型飛機前期在進行駕駛桿力測試時,使用的是第一代模擬式檢測儀表,主要存在以下不足[3]:①采用傳統的人工檢測方法,測量精度低,誤差大;②需要的人員多,對現場操作人員的經驗、技術依賴大,且測量結果易受操作人員影響;③無法得到實時的測試曲線,試驗數據得不到有效管理,更無法進行試驗數據的回放與分析。
針對上述情況,開發了一套先進的飛機駕駛桿力測試系統。該系統基于虛擬儀器平臺進行開發,具有數據采集、數據分析、數據顯示和數據保存等能力。目前,該系統已成功應用于某型飛機的駕駛桿力測試過程,運行穩定、可靠性良好,為該型飛機的飛行安全提供了有力保障。
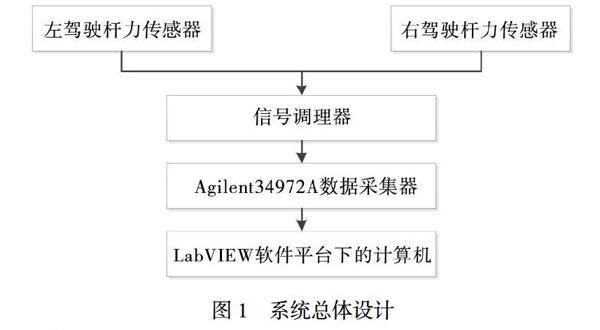
1 系統總體設計
系統總體設計如圖1所示。本系統硬件由左駕駛桿力傳感器、右駕駛桿力傳感器、信號調理器、Agilent34972A數據采集器和LabVIEW軟件平臺下的計算機等設備組成。首先通過設計的專用工裝將左駕駛桿力傳感器安裝于飛機主駕駛的駕駛桿上,將右駕駛桿力傳感器安裝于飛機副駕駛的駕駛桿上。駕駛桿力傳感器采用電阻應變式傳感器,當飛行員操縱飛機駕駛桿時,駕駛桿力傳感器將飛機駕駛桿的力值信號轉換成毫伏級的電壓信號。其次通過信號調理器將傳感器輸出的毫伏級信號放大到伏級,并進行濾波處理。然后通過Agilent34972A數據采集器將信號調理器輸出的模擬電壓信號轉換成數字信號。最后通過LabVIEW軟件平臺下的計算機控制采集卡進行數據的采集,并將采集的數據進行分析、處理、顯示與存儲等各種操作。
2 系統軟件設計
2.1 軟件流程設計
系統軟件流程如圖2所示。軟件啟動后,首先檢查配置文件和數據庫是否存在。如果不存在,退出軟件并彈出對話框提示用戶;如果都存在,軟件加載運行時相關資源加載完畢之后,進入登錄界面,等待用戶輸入用戶名和密碼。用戶點擊“登錄”按鈕以后,軟件自動在數據庫中搜索用戶輸入的用戶名及其對應的密碼,如果用戶名不存在或密碼不匹配,身份驗證失敗,用戶可點擊登錄界面的“取消”按鈕退出程序,也可重新輸入正確的用戶名和密碼再次登錄。
用戶輸入的用戶名和密碼與數據庫中存儲的信息一致則身份驗證通過,程序執行下一步——硬件自檢。硬件如果自檢失敗,則直接退出程序;如果自檢成功,則打開程序主界面。此時如果用戶沒有進行界面上的操作,系統將駕駛桿力傳感器獲取的數據解析后顯示在主界面相應的控件上。當用戶在主界面上進行操作時,響應用戶對應的操作,例如系統自檢、打開校準界面、數據分析、數據回放、查看幫助信息、退出程序等。
2.2 串口操作模塊設計
RS232串口操作子VI如圖3所示。本系統數據采集器與計算機之間通過RS232串口進行數據交互。LabVIEW串口操作是最基本的初始化、讀、寫、關閉操作,直接調用LabVIEW中提供的串口操作函數即可。為了后續操作的方便,將RS232串口操作封裝成一個子Ⅵ,后續根據數據讀、寫操作的不同,調用該子VI完成相應的操作即可。該子Ⅵ輸入輸出參數定義如表1所示。
2.3 主程序設計
主程序如圖4所示。主程序主要采用狀態機結構進行設計,首先設計一個枚舉常量,分別賦值初始化、測試操作和退出。程序運行之后,首先進入初始化,對界面的一些控件進行各種原始操作。例如界面上顯示的飛機駕駛桿力測試數據在每次試驗之前需要設置為0,類似這些操作都可以放在初始化中進行。初始化完成之后,軟件自動跳人測試操作幀,在測試操作中,使用了事件結構,當用戶沒有在界面進行操作時,事件結構進入到超時循環,此時通過調用2.2小節設計的RS232串口操作子Ⅵ,獲取Agilent34972A數據采集器采集的數據,解析后顯示在主界面相應的控件上。當用戶點擊主界面上的任意按鈕時,超時循環停止執行,程序自動跳入對應的事件結構幀,響應用戶的操作。
3 測試系統的應用狀況
系統主界面如圖5所示,主界面的左側為用戶可以操作的一些控件,共包括系統自檢、信號校準、數據分析、數據回放、幫助和退出系統六個按鍵。其中系統自檢可以對系統的硬件進行自檢;信號校準主要功能是通過軟件算法對輸入,輸出信號進行校準,解決由線壓降、分壓電路等原因造成的輸入/輸出源值與實際值不符的問題;數據分析可以對采集的信號進行時域、頻域等分析;數據回放方便客戶對試驗中保存的數據隨時進行數據的回放;幫助按鈕可以調用幫助文檔,幫助客戶正確使用和維護程序;退出系統讓整個系統停止工作并退出程序。在主界面的正中間為采集的左、右駕駛桿力實時波形圖,也可以通過上方的選項卡進行波形顯示和數值顯示的切換。
4 結論
本文基于LabVIEW軟件平臺,結合電阻應變式傳感器、信號調理器和Agilent34972A數據采集器、計算機等硬件設備,開發出了一套先進的飛機駕駛桿力測試系統。該系統解決了傳統的模擬式飛機駕駛桿力測量方法精度低、效率差、結果易受操作人員影響等不足,具有運行穩定、可靠性良好、測量精度高、功能易擴展等優點,為某型飛機的飛行安全提供了有力保障。
參考文獻:
[1]蔣紅娜,朱麗,馮銘瑜.飛機駕駛桿(盤)力系統現場測試校準技術研究[J].應用天地,2016,35(5):88-90.
[2]杜天軍,黃世超,劉書國,等.某型殲擊機駕駛桿力和位移測試校準系統[J].研究與開發,2016,35(12):70-74.
[3]鄒亮.飛機操縱系統機械特性測試軟件設計[D].南昌:南昌航空大學,2014.
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
