空中交通管制智能化指揮的探索與研究
2019-09-04 10:00:46曹燁琇
軟件工程 2019年8期
曹燁琇

摘? 要:本文介紹了空中交通管制智能化指揮中沖突探測及解脫方案的研究,提出了沖突預判、建立沖突解脫程序經驗庫和方法的設計,基于建立分布式并行計算架構,搭建了研究仿真平臺。通過引入計算機智能輔助決策,能有效降低管制指揮人員的工作壓力、人力資源成本及空管運行的人為風險。同時可以充分利用空域與機場資源,為航空器節約能耗等運營成本。
關鍵詞:飛行沖突;沖突解脫;規則庫
中圖分類號:TP399? ? ?文獻標識碼:A
1? ?引言(Introduction)
現階段,空管指揮系統只是達到了“半自動化”水平。例如,管制自動化系統,并非真正實現了“自動化”,而僅僅是完成了監視數據、飛行計劃等數據的自動化處理,實際的管理指揮還得依賴管理員的操作[1]。因此,空管系統自動化的水平還有待進一步發展提升。
未來空管系統的方向是協同化、精細化、智慧化。協同化是指空管運行將更強調空管內部、軍地空管之間,以及與航空公司、機場等之間的協同運行;精細化是指實現對空中交通未來運行狀態(包括氣象)的精準預測和航班運行的準確控制與定時到達;智慧化是指將互聯網、大數據、人工智能與空管傳統技術和設施設備實現深度融合,促進智慧空管的發展。
2? ?研究的必要性(Research necessity)
近年來,面對現代航空業的持續迅猛發展,以及空中流量的飛速增長,以人腦計算為主制定管制指揮方案的運行方式早已暴露出運行上的短板與弊端:
(1)由于管制員無意識的“錯忘漏”導致班機小于規定安全間隔的管制不安全事件,已成為制約空管安全運行非常重要的原因之一。由于管制員的情緒和技術內在特有的不穩定性與不確定性,加之與各類外部因素的交織疊加,進一步放大誘因,增加了不安全事件發生的概率。
(2)當面臨某一個扇區內航班密度不斷增加的情況,管制員會更多地將精力集中在管制運行的個別關鍵環節,而不可避免的減弱或是忽略了對于其他運行環節的關注度。導致了基于管制員自身判斷與調配能力所提供的管制服務質量逐步呈現下行趨勢。這恰與流量的增長形成反比。
(3)在目前的人員結構中,管制員與管制員之間確實也存在著技能與素質的個體差異,同時伴隨著各類人的生理因素的周期波動,使得管制服務無法長時間內維持在相對固定的尺度與標準之內,所提供的管制服務水準的波動也會進一步加大空地協同配合的難度,造成整體管制運行效率降低。
放眼當今世界,隨著計算機技術的快速發展,大數據與云計算以其優越性和先進性在多個工業領域得到廣泛的應用,取得了巨大的成效。這為計算機智能化及其相關技術在空中交通管制領域應用的可行性創造了條件。
3? ?關鍵技術研究(Key technology research)
目前國內空中交通管制系統主要基于二次雷達數據處理,著重于短期沖突探測與沖突自動告警。由于并未實現由系統自動給出飛行矛盾調配方案和飛行指揮指令以及飛行沖突解脫程序,系統智能化程度有待進一步提升。無論是國外民航強國還是我國國內,在基于多源、異構、跨界數據的管制智能化系統研發,以及直接應用于一線管制運行的成型產品方面,尚無典型案例,這也是亟待突破的技術空白地帶。具體需要實現以下幾個關鍵技術的研究:
(1)實現提前預判航空器飛行沖突。
(2)建立沖突解脫程序經驗庫和方法,給出合理解脫方案。
(3)建立分布式并行計算架構的系統結構,保證系統時效性。
3.1? ?提前預判航空器飛行沖突
建立航路、航線模型,考慮扇區內的所有航空器,提前預測某一扇區內航空器之間和將要進入某一扇區的航空器之間的飛行沖突,合理安排起飛時刻和進入某一扇區的時間,預先給出所有航空器進入某一扇區的預計上升和下降的高度和時間,實現提前避免航空器之間飛行沖突的目的,對某一扇區內所有航空器之間的飛行沖突進行探測,自動預先給出每個管制扇區內每架航空器的飛行高度,供管制人員參考。
根據實際存在的航路、航線、飛行高度、航班航跡、飛行速度、機場、扇區、管制區等信息,并按照業務需求,建立GIS模型。利用該GIS模型兩機進行沖突檢測。
首先引入一個關于飛機標準保護區的概念。根據標準間隔要求,在終端區范圍內,為保證安全,兩架航空器的水平間隔應大于3Nm,同時豎直間隔應大于1000ft。在遠離終端區的航路上,兩架航空器的水平間隔應擴大至5Nm。因此可以想象一個高1000ft,半徑為3Nm或5Nm的圓柱體作為飛機的保護區域,如圖1所示,在這個飛機保護區內禁止其他飛機進入。如果一架航空器進去另一架航空器的保護區域,則認為存在潛在沖突。
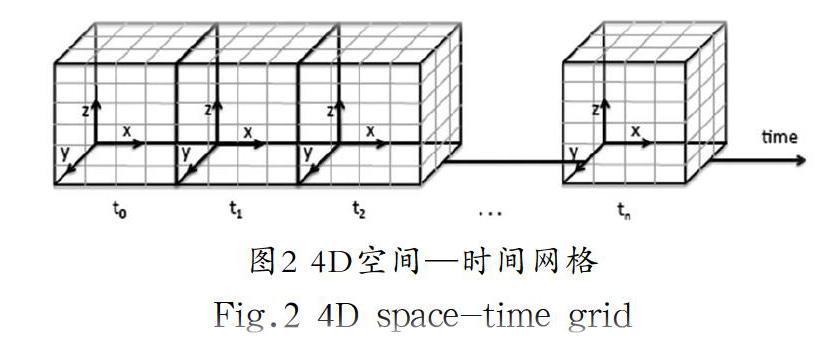
將亟待進行沖突探測解脫的區域分割為若干個如下圖2所示的4D空間-時間的網格。而同時,每個網格單元的大小按照標準尺寸進行設定,即終端區內水平方向3Nm,豎直方向1000ft,遠離終端區的航路上,水平方向5Nm。之后每條航跡都對應到設定好的相應的4D網格中,之后對航跡進行兩兩比較。如果一個網格單元同時被不同的航空器航跡所占用,或者一個網格單元的相鄰網格被其他航空器的航跡所占用,則判定存在潛在沖突[2]。
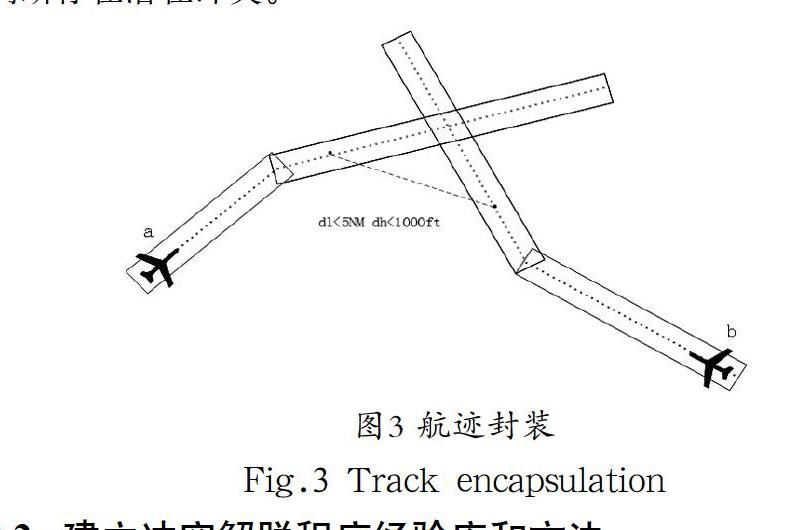
已知上述的航空器間的間隔標準,但是如果逐一對所有航跡進行點對點的沖突探測會是一項非常浩大的工程。為了減小探測階段的復雜性,會采取封裝航空器航跡的方法以加快系統沖突探測的速度。第一步是將航空器航跡按照其航向劃分為若干個航段,將每個航段封裝進入一個邊界框內。之后對所有封裝好的航跡進行探測,探測不同的航跡間是否存在交匯。最后,如果對于不同航空器的航跡間的邊界框存在交匯,則再對交匯的方格內的航空器的航跡進行點對點的沖突探測。以圖3為例,航空器a和航空器b的兩個邊界框存在交匯,則對交匯的兩個邊界框內的航路點進行沖突探測。若交匯邊界框內的航路點同時滿足空間和時間上的沖突條件,則判斷存在潛在沖突。
