一種四自由度串聯(lián)采摘機械臂系統(tǒng)設計
2019-09-10 07:22:44王勇劉群銘史穎剛
河南科技 2019年19期
王勇 劉群銘 史穎剛
摘 要:為提高番茄采摘效率,降低番茄生產(chǎn)成本,本文設計了一種四自由度串聯(lián)采摘機械臂系統(tǒng)。在設計過程中,筆者首先確定關節(jié)型機械臂構型,分析機械臂各桿長和工作負載,完后各關節(jié)電機選型;然后設計控制系統(tǒng)以及無刷電機控制流程;最后搭建實物樣機,控制各關節(jié)的電機將末端執(zhí)行器送到成熟番茄的位置完成采摘任務。
關鍵詞:番茄采摘;四自由度;串聯(lián)機械臂;無刷電機
中圖分類號:TP241 文獻標識碼:A 文章編號:1003-5168(2019)19-0027-03
Abstract: In order to improve the efficiency of tomato harvesting and reduce the production cost of tomatoes, a Four-Degree-of-Freedom series harvesting manipulator system was designed in this paper. In the design process, the author first determined the configuration of the articulated manipulator, analysed the length and workload of the manipulator, and then choosed the type of the articulated motor; then designed the control system and the control flow of the brushless motor; finally, a prototype was built to control the motor of each joint to send the end-effector to the position of mature tomato to complete the picking task.
Keywords: tomato picking;four degrees of freedom;series manipulator;brushless motor
番茄可用于鮮食和深加工,在中國鮮食番茄產(chǎn)量占比高達90%[1]。其中,用于深加工的番茄采摘已經(jīng)實現(xiàn)了機械化,而用于鮮食的番茄由于采摘難度大仍未實現(xiàn)機械化。目前,在中國參加鮮食番茄生產(chǎn)的勞動力主要是老人和婦女,工作效率較低。由于番茄采摘期較短,采摘作業(yè)效率不高,會導致部分番茄腐爛,影響番茄產(chǎn)量和質量。鮮食番茄采摘費時費力,其投入的勞動力占整個番茄生產(chǎn)環(huán)節(jié)勞動力投入的50%~70%[2]。隨著社會的進步,人工采摘成本不斷提高,而采摘成本則會在更大程度上影響鮮食番茄的市場價值。本文主要基于農(nóng)業(yè)機器人技術,針對標準化溫室番茄采摘自動化問題,設計一種四自由度串聯(lián)采摘機械臂系統(tǒng)。
1 機械系統(tǒng)設計
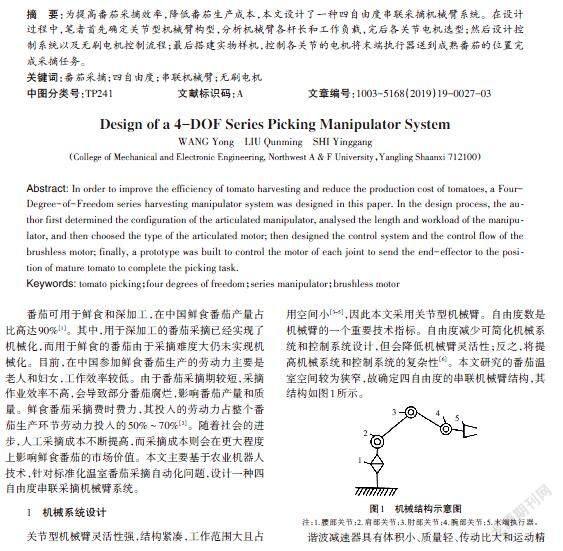
關節(jié)型機械臂靈活性強,結構緊湊,工作范圍大且占用空間小[3-5],因此本文采用關節(jié)型機械臂。自由度數(shù)是機械臂的一個重要技術指標。自由度減少可簡化機械系統(tǒng)和控制系統(tǒng)設計,但會降低機械臂靈活性;反之,將提高機械系統(tǒng)和控制系統(tǒng)的復雜性[6]。本文研究的番茄溫室空間較為狹窄,故確定四自由度的串聯(lián)機械臂結構,其結構如圖1所示。
諧波減速器具有體積小、質量輕、傳動比大和運動精度高等特點。同時,交流電機、步進電機和無刷電機目前被廣泛應用于機器人設計制造。其中,交流電機扭矩大但需要交流電源,不適用于農(nóng)業(yè)機器人;步進電機精度高,但不能對其進行力矩控制;無刷電機壽命長、噪聲低、調速性能好。因此,本文設計的四自由度的串聯(lián)機械臂的腰部關節(jié)電機、肩部關節(jié)電機、肘部關節(jié)電機均使用無刷電機加諧波減速器驅動。舵機具有體積小、扭矩大、易于控制的特點,廣泛應用于機器人控制。因此,本文設計的四自由度的串聯(lián)機械臂的腕部關節(jié)和末端執(zhí)行器電機使用舵機驅動。
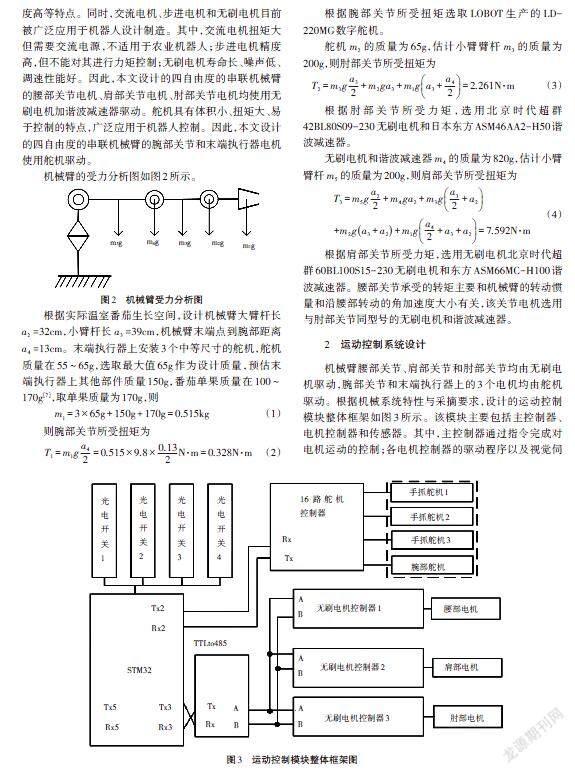
機械臂的受力分析圖如圖2所示。
根據(jù)實際溫室番茄生長空間,設計機械臂大臂桿長[a2]=32cm,小臂桿長[a3]=39cm,機械臂末端點到腕部距離[a4]=13cm。末端執(zhí)行器上安裝3個中等尺寸的舵機,舵機質量在55~65g,選取最大值65g作為設計質量,預估末端執(zhí)行器上其他部件質量150g,番茄單果質量在100~170g[7],取單果質量為170g,則
(1)
則腕部關節(jié)所受扭矩為
(2)
根據(jù)腕部關節(jié)所受扭矩選取LOBOT生產(chǎn)的LD-220MG數(shù)字舵機。
舵機[m2]的質量為65g,估計小臂臂桿[m3]的質量為200g,則肘部關節(jié)所受扭矩為
(3)
根據(jù)肘部關節(jié)所受力矩,選用北京時代超群42BL80S09-230無刷電機和日本東方ASM46AA2-H50諧波減速器。
無刷電機和諧波減速器[m4]的質量為820g,估計小臂臂桿[m5]的質量為200g,則肩部關節(jié)所受扭矩為
(4)
根據(jù)肩部關節(jié)所受力矩,選用無刷電機北京時代超群60BL100S15-230無刷電機和東方ASM66MC-H100諧波減速器。腰部關節(jié)承受的轉矩主要和機械臂的轉動慣量和沿腰部轉動的角加速度大小有關,該關節(jié)電機選用與肘部關節(jié)同型號的無刷電機和諧波減速器。
2 運動控制系統(tǒng)設計
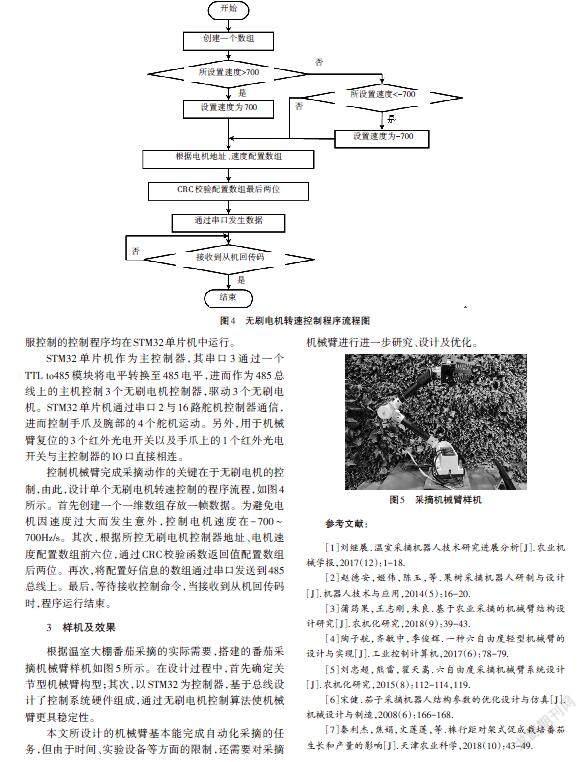
機械臂腰部關節(jié)、肩部關節(jié)和肘部關節(jié)均由無刷電機驅動,腕部關節(jié)和末端執(zhí)行器上的3個電機均由舵機驅動。根據(jù)機械系統(tǒng)特性與采摘要求,設計的運動控制模塊整體框架如圖3所示。該模塊主要包括主控制器、電機控制器和傳感器。其中,主控制器通過指令完成對電機運動的控制;各電機控制器的驅動程序以及視覺伺服控制的控制程序均在STM32單片機中運行。
STM32單片機作為主控制器,其串口3通過一個TTL to485模塊將電平轉換至485電平,進而作為485總線上的主機控制3個無刷電機控制器,驅動3個無刷電機。STM32單片機通過串口2與16路舵機控制器通信,進而控制手爪及腕部的4個舵機運動。另外,用于機械臂復位的3個紅外光電開關以及手爪上的1個紅外光電開關與主控制器的IO口直接相連。
控制機械臂完成采摘動作的關鍵在于無刷電機的控制,由此,設計單個無刷電機轉速控制的程序流程,如圖4所示。首先創(chuàng)建一個一維數(shù)組存放一幀數(shù)據(jù)。為避免電機因速度過大而發(fā)生意外,控制電機速度在-700~700Hz/s。其次,根據(jù)所控無刷電機控制器地址、電機速度配置數(shù)組前六位,通過CRC校驗函數(shù)返回值配置數(shù)組后兩位。再次,將配置好信息的數(shù)組通過串口發(fā)送到485總線上。最后,等待接收控制命令,當接收到從機回傳碼時,程序運行結束。
3 樣機及效果
根據(jù)溫室大棚番茄采摘的實際需要,搭建的番茄采摘機械臂樣機如圖5所示。在設計過程中,首先確定關節(jié)型機械臂構型;其次,以STM32為控制器,基于總線設計了控制系統(tǒng)硬件組成,通過無刷電機控制算法使機械臂更具穩(wěn)定性。
本文所設計的機械臂基本能完成自動化采摘的任務,但由于時間、實驗設備等方面的限制,還需要對采摘機械臂進行進一步研究、設計及優(yōu)化。
參考文獻:
[1]劉繼展.溫室采摘機器人技術研究進展分析[J].農(nóng)業(yè)機械學報,2017(12):1-18.
[2]趙德安,姬偉,陳玉,等.果樹采摘機器人研制與設計[J].機器人技術與應用,2014(5):16-20.
[3]蒲筠果,王志剛,朱良.基于農(nóng)業(yè)采摘的機械臂結構設計研究[J].農(nóng)機化研究,2018(9):39-43.
[4]陶子航,齊敏中,季俊輝.一種六自由度輕型機械臂的設計與實現(xiàn)[J].工業(yè)控制計算機,2017(6):78-79.
[5]劉忠超,熊雷,翟天嵩.六自由度采摘機械臂系統(tǒng)設計[J].農(nóng)機化研究,2015(8):112-114,119.
[6]宋健.茄子采摘機器人結構參數(shù)的優(yōu)化設計與仿真[J].機械設計與制造,2008(6):166-168.
[7]秦利杰,焦娟,文蓮蓮,等.株行距對架式促成栽培番茄生長和產(chǎn)量的影響[J].天津農(nóng)業(yè)科學,2018(10):43-49.
