多鏈路融合控制警報系統設計與實現
2019-09-10 19:20:47劉曉江羅琦郝志剛
計算機與網絡 2019年18期
劉曉江 羅琦 郝志剛
摘要:針對警報告警信息化控制手段落后、人工發放效率低下的現狀,基于PDT數字集群、北斗衛星和有線PSTN,設計實現了一種基于多鏈路融合控制的警報系統,這3種通信方式互相獨立、互為備份,并采用沖突檢測機制,保障警報發放的可靠性、正確性和有效性。在警報控制管理方面,采用地理信息系統(GIS)技術實現對警報器的空間分布管理,采用多級統一用戶管理和數據同步技術,形成省、市和區縣多級警報控制管理機制,通過實驗驗證了多鏈路融合控制警報系統設計的合理性和有效性。
關鍵詞:數據同步;警報;多級統一用戶管理;GIS
中圖分類號:TN876文獻標志碼:A文章編號:1008-1739(2019)18-66-4
0引言
目前,大多數城市仍以電動警報器為主,基本采用無線遙控方式,技術手段比較落后,警報控制大多采用單一頻點發送方式,當干擾發生時不能發放警報[1]。在著重打擊“生命線”目標的現代戰爭中,電力設施多為強敵的首輪空襲對象;以電聲、電動固定警報器組成的傳統警報網絡已經明顯無法滿足實戰需要[2],而且隨著城市化的建設進程,市區面積不斷擴大、高層建筑大幅增加,帶來了通信距離遠、電磁干擾強等新問題,市、區縣與街道在信息化系統支持下相互響應的警報發放體系和全天候、全時段及無盲區發放警報的目標無法實現。為解決以上問題,需要設計研制基于多種通信手段、互相獨立和互為備份的基于信息化技術的高可靠性的多鏈路融合控制的警報系統。
1關鍵技術
1.1數據同步
采用數據抽取、轉換和裝載(ETL技術),結合多中心統一用戶管理的授權和組織機構同步機制,實現基于多中心權限分級的數據授權訪問、雙向同步。
1.2 GIS
GIS有時又稱為“地學信息系統”,是一種特定的、重要的空間信息系統,在計算機硬、軟件系統支持下,對整個或部分地球表層(包括大氣層)空間中的有關地理分布數據進行采集、儲存、管理、運算、分析、顯示和描述的技術系統。
2設計方案
2.1體系結構
多鏈路融合控制警報系統體系結構分為省級控制中心、市級控制中心和各區縣分控中心,市級控制中心具有最高控制權限,在市級控制中心的授權下各分控中心可以分別對各自所在區縣進行警報發放控制[3]。
省級控制中心在滿足本地區警報管理需要的基礎上,實現與本轄區內各地市級警報平臺的互聯互通,重點完成省級多級統一用戶管理、匯總全省警報器資源數據及數據同步、警報覆蓋范圍分析等主要功能。
市級控制中心在滿足本地區警報管理需要的基礎上,實現與省級和區縣級警報智能發送平臺的互聯互通,重點完成本市多級統一用戶管理、警報器資源管理與數據同步、警報發放控制、警報日常巡檢維護和警報覆蓋分析等主要功能。
區縣級分控中心在滿足本地區警報管理需要的基礎上,實現與市級警報平臺的互聯互通,重點完成本區縣多級統一用戶管理、警報器資源管理與數據同步、警報市級授權發放控制、警報日常巡檢維護和警報覆蓋分析等主要功能。
2.2系統架構
多鏈路融合控制警報系統基于數據同步技術、GIS技術、PDT數字集群技術、北斗衛星技術和有線PSTN技術,實現警報控制與發放,可應用于平時演練、突發事件和戰時的警報鳴放與大功率的緊急語音廣播通知。
系統采用分層模塊化設計思想,分為終端層、接入層、控制層和應用層。終端層以警報器為主.接入層設計涵蓋PDT數字集群接入模塊、北斗接入模塊和有線接入模塊,負責接收來自中心控制器的警報指令,并控制警報器進行相應的警報操作。控制層提供PDT數字集群中央控制器、北斗衛星中央控制器和有線中央控制器,負責向應用層提供多種鏈路融合通信的警報控制服務。應用層基于GIS引擎,采用J2EE技術,提供警報發放控制和管理的交互式操作軟件平臺,系統結構如圖1所示。

2.3多級統一用戶管理
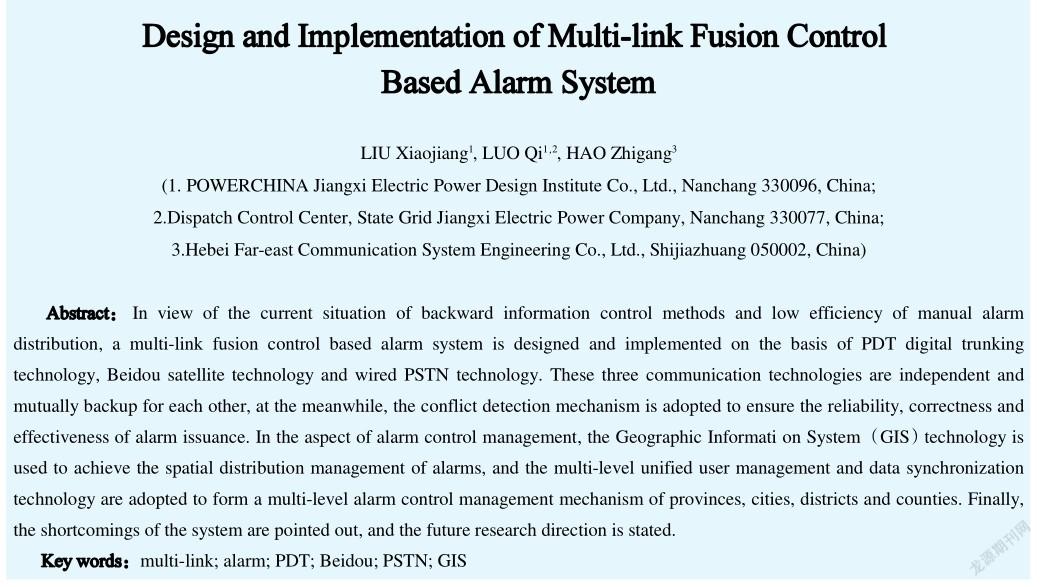
多級統一用戶管理(MUUM)支持多級部署、授權和組織機構同步。通過Web Service接口將賬戶權限相關的服務發布出去,為各級用戶提供統一鑒權服務。對每個Web Service接口采用身份認證,以防止非法用戶操作,提高訪問的安全性。多級統一用戶管理結構如圖2所示。
2.4警報資源數據同步
警報資源數據同步(Alarm Data Sync,ADS)采用數據同步技術,各級中心和下級經過MUUM授權可進行數據雙向同步。數據同步可接受MUUM授權和認證,靈活自定義數據格式,進行不同警報資源異構數據源之間的交換同步。警報資源數據同步結構如圖3所示。

2.5系統組成
多鏈路融合控制警報系統由警報平臺軟件、警報中央控制器和警報終端組成。
2.6系統工作流程
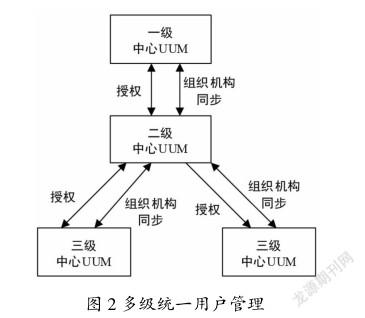
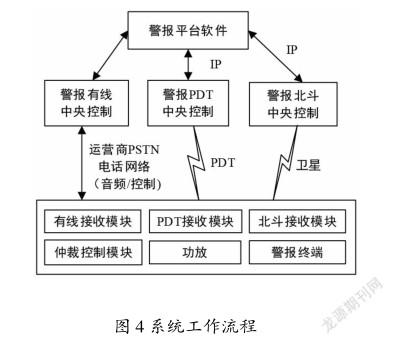
系統通過警報平臺軟件的警報統控模塊,選擇目標警報終端,選擇通信方式,通過功能按鈕,將警報發放、解除、授時和巡檢等功能指令通過相應的警報中央控制器發送到警報終端,由警報終端上的仲裁模塊判決哪種方式的命令先到達,進行仲裁判決,通過其他方式后到的指令,直接返回先前執行的結果。系統工作流程如圖4所示。
2.7警報平臺軟件
警報平臺軟件基于J2EE技術的3層架構進行設計,采用基于B/S模式、GIS及組件化技術進行構建。在要素圖上顯示警報點的狀態,查看全市警報網點分布。控制中心應具有信息備份、編輯、存放、查詢、狀態回示和打印等功能,具有智能化系統巡檢與維護能力[4]。主要功能包括警報發放控制、警報發放記錄查詢、警報發放統計、警報巡檢、警報巡檢記錄查詢、警報巡檢統計、警報資源管理、多級統一用戶管理、GIS基礎功能、警報范圍覆蓋分析、警報設備狀態查詢和警報資源數據同步。警報平臺軟件界面如圖5所示。

2.8警報中央控制器
警報中央控制器分為警報PDT中央控制器、警報有線中央控制器和警報北斗中央控制器。
警報PDT中央控制器采用成熟PDT技術,由中心控制器、警報基站和網絡傳輸設備等組成。支持警報發送平臺軟件發起的數據短消息。數據短消息定義包括各種警報警報指令:警報鳴放、停止、授時、巡檢和廣播和復位等。
警報有線中央控制器采用PSTN技術,設計多個模擬的專有通道,模塊采用調制解調器(Modem)為警報控制提供有線警報控制通道,同時提供語音廣播音頻鏈路。警報有線通信中央控制器設計普通電話線接口接入有線通信網絡。
警報北斗中央控制器采用北斗指揮機硬件,通過北斗短報文數據通道為警報控制提供通信鏈路通道,傳輸警報發放、停止、授時、巡檢和回示結果等指令數據。
2.9警報終端
警報終端是警報系統中的終端設備,可配備多種通信方式的接收模塊(PDT數字集群接收模塊、PSTN有線接收模塊和北斗衛星接收模塊),各通信模塊可自由搭配組合應用,支持接收、解密并執行來自警報中央控制器的警報控制指令。支持仲裁判別機制,采用任務編號和數據緩沖區的操作策略避免多種通信鏈路對同一個警報器的重復控制[5],當接收到多種傳輸鏈路的同一警報控制指令時,按照“誰先到,誰先執行”的方式進行仲裁判定執行,并回送指令結果。
警報終端硬件由警報終端整機結構、仲裁控制模塊、PDT接收模塊、北斗接收模塊、有線接收模塊及功放電路組成。
①警報終端整機結構設計為壁掛式警報終端,使用膨脹螺絲固定于空曠的墻壁,并設計風扇用于高功率PDT接收模塊以及整機散熱。
②仲裁控制模塊用于處理3種通信鏈路的串口指令,并完成對警報器功放的控制。
③PDT接收模塊主要功能是警報語音和數據信號的發射接收與信號處理,采用半雙工方式,基于多級放大器級聯逐步放大和功率控制的方法,設計為輸出功率可調。發射鏈路設計由功率放大電路和功率控制電路組成,前者通過四級放大器對發射VCO產生的信號進行逐級放大,后者通過輸出功率等級要求和采集功放溫度、駐波比,對功率放大器進行控制,實現輸出功率滿足要求的同時保護功放不因溫度過高、天線失配和電壓過高而燒壞[2]。接收電路設計主要包括射頻濾波器、低噪聲放大器、下混頻器、中頻濾波器、中頻放大器和接收本振處理。音頻電路設計采用CODEC芯片進行設計。
④北斗接收模塊采用體積小、重量輕的北斗一體機,由北斗模塊和天線組成,具備北斗衛星短報文通信功能,可實現警報遠程指令控制。
⑤有線接收模塊主要通過Modem與網絡相連接,經有線網絡接收主控中心發來的各種控制信號和警報信號,通過解碼獲取控制信息并控制警報器發送報警信號[6]。
⑥功放電路采用基于CMOS的D類音頻功率放大器設計,既能提供高效率大功率又能實現高保真的音頻性能。
3實驗結果與分析
多鏈路融合控制警報系統通過60部終端進行警報控制實驗,通過無PDT數字集群方式控制警報終端發放時延不大于7 s,通過北斗方式控制警報終端警報發放時延不大于5 s,通過有線方式控制警報終端警報發放時延不大于5 s;這3種警報控制方式通過警報平臺軟件在警報發放過程中互相獨立、互為備份,保障了警報發放的可靠性;警報終端采用沖突檢測技術,保障了多種控制方式的警報發放的正確性和有效性。
4結束語
多鏈路融合控制警報系統填補了原有警報發放管理手段單一,控制能力弱,檢測能力不足的問題,增強了警報控制發放管理手段,為實現警報發放的準確化、精確化打下基礎。
參考文獻
[1]靳大路.防空警報控制系統的研究與開發[D].青島:青島理工大學,2009.
[2]王琦.基于230MHz PDT數字集群的人防警報統控系統設計與實現[D].西安:西安電子科技大學,2018.
[3]鄧建民.人防警報系統專用無線通信網絡技術研究[D].哈爾濱:哈爾濱理工大學, 2007.
[4]劉國平.人民防空警報控制系統設計與實現[D].上海:同濟大學,2006.
[5]孫安宅,韓志永,李永波.一種具有多種通信鏈路接口的警報控制器及控制方法:ZL201510908449.2[P]. 2016-4-20.
[6]孫恒.防空警報有線控制及遠程狀態監測系統[D].大連:大連理工大學,2009.
