基于DELMIA的機器人工作站仿真研究
2019-09-10 07:22:44賀金鑫
河南科技 2019年1期
賀金鑫


摘 要:本文利用DELMIA軟件模擬機器人工作站,觀察機器人工作站的整體情況,查看機器人運動軌跡和零部件的運動動作,檢查工作站運行時的干涉情況,并針對出現(xiàn)的問題提出解決方案,及時改進機械結(jié)構和整體布局,以提高工作站的生產(chǎn)效率。
關鍵詞:DELMIA;機器人仿真;路徑優(yōu)化;干涉檢測
中圖分類號:TP242 文獻標識碼:A 文章編號:1003-5168(2019)01-0008-03
Simulation Application of Robot Workstation Based on DELMIA
HE Jinxin
(Harbin University of Technology Robot Group (Harbin) Huacui Intelligent Equipment Co., Ltd.,Harbin Heilongjiang 150036)
Abstract: In this paper, DELMIA software was used to simulate the robot workstation, observed the overall situation of the robot workstation, viewed the robot's trajectory and the movement of parts, checked the interference during the operation of the workstation, and solved the problems, improved the mechanical structure and overall layout in time, so as to improve the productivity of the workstation.
Keywords: DELMIA;robot simulation;path optimization;interference detection
隨著企業(yè)用工成本不斷增加和機器人應用技術不斷成熟,機器人工作站逐漸接替了一些勞動強度大、動作單一的工作,如碼垛、搬運、噴漆、焊接、打磨拋光和自動化裝配等。但是,由于不同的生產(chǎn)企業(yè)往往采用不同的生產(chǎn)工藝,因此,對機器人的動作要求也就不同。在設計機器人工作站時,為了保證不同企業(yè)生產(chǎn)工藝和驗證設計的合理性,需要模擬仿真機器人工作時的路徑軌跡和其他零部件的運動狀態(tài),優(yōu)化機器人運動軌跡和工作站整體布局,從而提高設計質(zhì)量,降低設計和制造成本。
1 DELMIA的仿真功能
達索公司的DELMIA是一款互動制造應用軟件,應用于數(shù)字化企業(yè),其通過PPR hub把工藝任務、產(chǎn)品、資源聯(lián)系起來,通過DELMIA/Robotics模塊規(guī)劃機器人工作時的運動軌跡和零部件的機械運動。弧焊時,機器人與變位機相對配合運動。DELMIA在Workcell Sequencing模塊中編輯、分配、排列工藝任務,模擬工作站工作時真實的工作流程,檢查機器人運動時與零部件之間的干涉情況。
2 機器人工作站仿真步驟
仿真前,用三維軟件設計完成工作站的零部件模型。CATIA模型可以直接導入DELMIA。三維軟件可以通過中間格式stp或igs導入,用相應的模塊給零部件添加運動機構,擺放零部件在工作站中的位置,規(guī)劃機器人的運動軌跡,分配排列工藝任務,檢查零部件的干涉情況,完成工作站的虛擬仿真。
2.1 零部件運動機構的建立
仿真前,把零部件導入DELMIA,并添加零部件的運動機構,如旋轉(zhuǎn)、平移等。在“Device building”模塊中,給導入的模型添加運動機構(如圖1所示),如焊鉗的閉合與打開、夾具或抓手的夾緊和張開、滑臺滑塊的滑動、氣缸的伸縮和變位機的旋轉(zhuǎn)等,并使用“Home Position”命令為模型添加機構的初始位置,如零點和極限位置等。如果模型是機器人的末端執(zhí)行器,則需要添加基礎坐標和工具坐標。必要時,還要在夾具或其他模型上添加引導抓手的設計坐標,最后以“.CATproduct”的格式保存。
<F:\歡歡文件夾\201904\河南科技201901\河南科技(創(chuàng)新驅(qū)動)2019年第01期_103595\Image\image1.png>
圖1 建立運動機構
2.2 機器人工作站的整體布局
該步驟是將零部件模型和機器人模型添加到productlist或resourcelist的設計樹中。DELMIA的資源庫包含了大量機器人廠商的模型。通常來說,機器人模型可以從資源庫中直接導入,具體實施步驟如下:首先使用set tool命令把機器人的末端執(zhí)行器安裝到機器人上,調(diào)整模型的坐標值或拖拽指南針的6個自由度修改模型所在的位置。然后使用“Layout Tools”工具欄添加模型之間的相對位置關系和模型之間的父子關系,使用“Robot Controller”為機器人添加其他屬性,如增加機器人的工具坐標、設定機器人的外部軸、運動屬性等[1]。
調(diào)整好機器人的工作站后,檢查模型之間是否有干涉,并留出人工操作的空間和行走通道,以方便日后維護。此外,還要注意機器人到機器人控制柜的距離不得大于機器人的線纜長度。
2.3 工作站機器人的運動軌跡仿真
在define task definition模塊中規(guī)劃機器人的運動軌跡和末端執(zhí)行器的動作,如焊槍或抓手的開閉,搬運工件時的運動軌跡,滑臺帶動機器人平行移動動作的模擬,使用“Robot Management”工具欄規(guī)劃機器人的行走路徑。“Teach a device”命令的作用是示教機器人路徑和動作,通過拖拽機器人的工具坐標或調(diào)整機器人各個軸的角度,使機器人到達指定的位置后,在“Teach”對話框添加路徑點[2]。添加的路徑點有兩種:Via經(jīng)過點和process工藝點(見圖2)。
<F:\歡歡文件夾\201904\河南科技201901\河南科技(創(chuàng)新驅(qū)動)2019年第01期_103595\Image\image2.png>
圖2 配置processg工藝點
當機器人抵達經(jīng)過點時,機器人的末端執(zhí)行器不產(chǎn)生動作。在工藝點中,可以添加機器人末端執(zhí)行器的動作,如點焊、抓取、更換末端執(zhí)行器等動作。根據(jù)實際情況,還可以把機器人行走的路徑設置成關節(jié)運動、直線運動、弧線運動等。按機器人軌跡的先后順序添加路徑點。然后點擊“Sim Frame”中的運動按鈕,觀察機器人行走的運動軌跡。若發(fā)現(xiàn)有機器人的運動軌跡和工作姿態(tài)不合理,可通過插入中間點或調(diào)整末端執(zhí)行器角度的方法來解決。此外,DELMIA還提供用于弧焊的“Arc Welding”模塊,可以生成用于弧焊的連續(xù)焊縫和機器人與變位機協(xié)同工作的運動模擬。規(guī)劃運動軌跡時,要特別注意管線包與周邊設備的空間,以免出現(xiàn)干涉和剮蹭[3]。
觀察機器人運動軌跡的同時,還應觀察機器人各個軸運動的角度。如果機器人在某一運動位置非常接近極限行程,應調(diào)整機器人的運動姿態(tài)或與零部件的擺放位置,甚至修改模型的結(jié)構尺寸。
2.4 工作站工藝流程的建立
為了使機器人工作站按實際生產(chǎn)過程執(zhí)行多個連續(xù)的運動程序,應使用Workcell Sequencing(工作單元排列模塊)在ProcessList下添加工藝任務、分配資源程序、排列工藝流程。操作步驟如下。
①使用“insert activity”命令在ProcessList下插入工藝任務(見圖3)。
<F:\歡歡文件夾\201904\河南科技201901\河南科技(創(chuàng)新驅(qū)動)2019年第01期_103595\Image\image3.png>
圖3 插入工藝任務
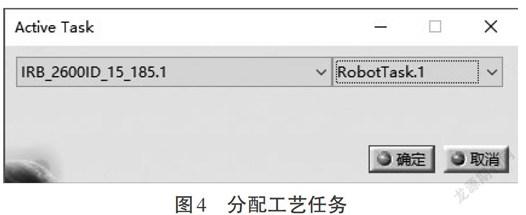
②使用“Assign a resource”把帶有程序的資源分配到工藝任務中,然后用“set an active task”命令把資源的程序分配給工藝任務(見圖4)。
<F:\歡歡文件夾\201904\河南科技201901\河南科技(創(chuàng)新驅(qū)動)2019年第01期_103595\Image\image4.png>
圖4 分配工藝任務
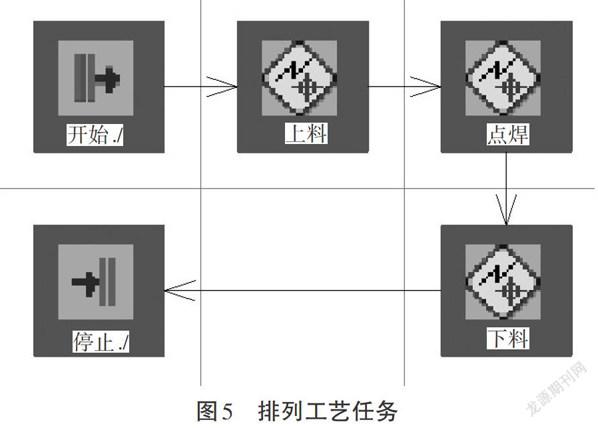
③點擊“Open PERT Chart”命令進入排列工藝順序的界面,按實際的工藝流程將各個工藝任務依次連接起來。排列工藝任務見圖5。
<F:\歡歡文件夾\201904\河南科技201901\河南科技(創(chuàng)新驅(qū)動)2019年第01期_103595\Image\image5.png>[開始./][停止./][下料][點焊][上料]
圖5 排列工藝任務
排列好工藝流程后,結(jié)合“Data View”工具欄的甘特圖命令,可以直觀顯示每個工藝流程所用的時間。適當優(yōu)化機器人工作路徑和減少輔助動作,可以提高機器人工作站的工作效率。
查看設計好的工藝流程應使用“Simulation”工具欄的Process Simulation命令。直觀地模擬機器人執(zhí)行焊接、搬運、滑移、更換末端執(zhí)行器時的連續(xù)動作,打開“Automatic Real-time Simulation On/Off”開關,機器人工作站會按設定好的運動速度運行,這樣呈現(xiàn)在屏幕上的虛擬仿真會更加真實。
3 碰撞干涉檢查
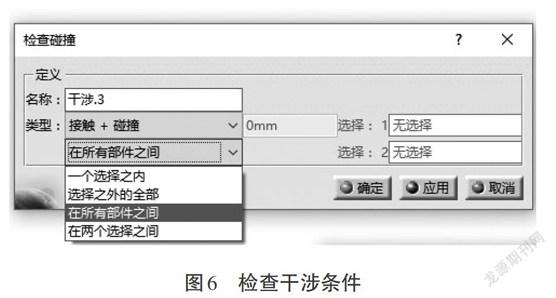
由于機器人工作站的空間狹小,極有可能出現(xiàn)機器人與其他零部件(工件、底座 夾具等)發(fā)生運動干涉或機器人與機器人之間的碰撞[4]。DELMIA的Simulation analysis tools工具欄提供檢測碰撞干涉的功能。在使用碰撞干涉檢查時,首先在“Clash”命令設定干涉檢測的方式(如圖6所示)。其次,在“Analysis Configuration”選擇配置好的干涉類型和干涉發(fā)生時的顯示狀態(tài),然后打開“mode analysis on/off”干涉檢查開關,如果運行仿真時發(fā)生了干涉,那么DLEMIA會根據(jù)預先的設定做出相應的反應,如停止仿真運動或突出顯示干涉的零件。在發(fā)生碰撞干涉的地方,可以調(diào)整工作站的布局,優(yōu)化機器人運動路徑和工作姿勢,或修改模型尺寸。經(jīng)過多次仿真運行和修改調(diào)整直至沒有碰撞干涉提示,就可以將運動仿真以動畫的形式輸出保存。這樣就完成了工作站的碰撞干涉檢查工作。
<F:\歡歡文件夾\201904\河南科技201901\河南科技(創(chuàng)新驅(qū)動)2019年第01期_103595\Image\image6.png>
圖6 檢查干涉條件
4 結(jié)語
本文利用DELMIA對機器人工作站的布局和機器人路徑規(guī)劃進行仿真,直觀模擬機器人工作站中機器人運動軌跡和設備之間的擺放位置,避免機器人與設備之間的干涉[5]。
參考文獻:
[1]林巨廣,樊曉光,李體振.基于DELMIA焊裝線工藝規(guī)劃與仿真驗證[J].組合機床與自動化加工技術,2013(4):106-109.
[2]王茜,徐志剛,白鑫林,等.基于DELMIA的彈藥填充機器人工藝仿真及優(yōu)化[J].控制工程,2016(S1):73-78.
[3]陳世鐘,宋健,黃卓,等.DELMIA在機器人生產(chǎn)線仿真中的應用[J].機械制造與自動化,2016(4):157-160.
[4]嚴雋琪,范秀敏,馬登哲.虛擬制造的理論、技術基礎與實踐[M].上海:上海交通大學出版圖,2003.
[5]王家海,龐旭旻.基于DELMIA/Robotics的白車身焊接機器人路徑仿真研究[J].機電產(chǎn)品開發(fā)與創(chuàng)新,2009(1):6-7.
