基于DSP的交流伺服電機(jī)控制系統(tǒng)的研究
2019-09-10 22:34:41胡慶杰張建偉徐艷趙曉陽
E動時尚·科學(xué)工程技術(shù) 2019年14期
關(guān)鍵詞:研究
胡慶杰 張建偉 徐艷 趙曉陽
摘 要:在早期的時候,伺服電機(jī)一般采用直流電機(jī)。而直流電機(jī)本身具有電刷及換向器,在電機(jī)運(yùn)行時由于摩擦容易產(chǎn)生火花,因此使得直流電機(jī)的使用場合受到了一定的限制。同時,長期的摩擦?xí)?dǎo)致電刷及換向器損壞,增加了維修的成本。隨著社會的不斷發(fā)展,伺服系統(tǒng)的應(yīng)用也越來越廣泛。本文提出了一種基于DSP的交流伺服電機(jī)控制系統(tǒng),給出了控制系統(tǒng)的硬件和軟件設(shè)計。
關(guān)鍵詞:基于DSP;交流伺服電機(jī);控制系統(tǒng);研究
1 前言
數(shù)字控制系統(tǒng)是自動控制理論和計算機(jī)技術(shù)相結(jié)合的產(chǎn)物,一般是指微處理機(jī)參與控制的開環(huán)或閉環(huán)系統(tǒng),通常具有精度高、速度快、存儲量大和有邏輯判斷功能等特點(diǎn),因此可以實(shí)現(xiàn)高級復(fù)雜的控制方法,獲得快速精密的控制效果。目前大多數(shù)運(yùn)動控制系統(tǒng)仍采用單片機(jī)來進(jìn)行設(shè)計,雖然成本相對較低,但運(yùn)算能力較弱難以完成大運(yùn)算量算法。針對伺服驅(qū)動系統(tǒng)高速度、高精度的要求,出現(xiàn)了許多適應(yīng)不同工作狀況的高性能的控制算法。但是這些控制算法都是基于傳統(tǒng)的硬件結(jié)構(gòu),伺服驅(qū)動器只能采用某種固定的控制算法,系統(tǒng)不能根據(jù)工作環(huán)境、負(fù)載狀態(tài)的變化實(shí)時地調(diào)整控制算法和控制參數(shù),不能充分發(fā)揮不同控制算法的性能特點(diǎn),從而影響了伺服驅(qū)動器在不同工作環(huán)境下性能的發(fā)揮。
DSP具有極強(qiáng)的數(shù)字計算能力,利用DSP可將很多新型的控制算法應(yīng)用于伺服控制。本文提出了以最新的數(shù)字處理芯片(DSP)TM$320F28335為核心控制芯片的交流伺服電機(jī)控制系統(tǒng),它具有功耗小、性能高、運(yùn)算速度快、數(shù)據(jù)和程序存儲器容量大、AD采樣和處理精度高等特點(diǎn),能滿足伺服系統(tǒng)復(fù)雜控制算法的要求。
2 交流伺服技術(shù)的發(fā)展趨勢
采用新型的高速微處理器和數(shù)字信號處理器(DSP)的現(xiàn)代交流伺服技術(shù)已經(jīng)全面取代模擬器件的伺服控制技術(shù)成為市場主流,現(xiàn)在數(shù)字信號閉環(huán)控制已經(jīng)非常普遍,如電流環(huán)、速度環(huán)、位置環(huán)等。高性能的DSP、ARM等新型電力電子半導(dǎo)體器件越來越多用于伺服控制系統(tǒng)。這些先進(jìn)元件的應(yīng)用降低了系統(tǒng)損耗,提高了控制效率。結(jié)合市場需求的變化,可以看到以下最新的一些發(fā)展趨勢。
2.1 高效率化
隨著開關(guān)頻率較高的現(xiàn)代電力電子半導(dǎo)體器件的顯著應(yīng)用,交流伺服系統(tǒng)的效率得到顯著提高,但仍需要我們繼續(xù)加強(qiáng)交流伺服電機(jī)的效率優(yōu)化。特別是在一些驅(qū)動電路、能量反饋、傳感器的控制精度以及先進(jìn)的理論控制算法等方面還需我們進(jìn)一步開發(fā)利用。
2.2 一體化和集成化
現(xiàn)在的很多交流伺服系統(tǒng)發(fā)展方形趨向于將被控對象電動機(jī)、前向驅(qū)動模塊,負(fù)向反饋模塊以及串口通信模塊等實(shí)現(xiàn)縱向一體化。交流伺服系統(tǒng)現(xiàn)在也實(shí)行高度集成化,從被控對象,功率驅(qū)動等模塊的集成使系統(tǒng)從設(shè)計制造到運(yùn)行維護(hù)都緊密的集成在一塊。這樣既縮小整個控制系統(tǒng)的體積,又使得系統(tǒng)的安裝和調(diào)試得到簡化。
2.3 通用化
通用型的伺服驅(qū)動模塊配置有豐富的菜單功能和大量的參數(shù)。在硬件配置一定的條件下,它可以工作在不同的控制方式,如變壓變頻控制、永磁同步交流伺服電機(jī)控制。矢量控制等。根據(jù)不同類型的傳感器可以工作在不同場合,可以使用電機(jī)本身配置的傳感器構(gòu)成半閉環(huán)控制系統(tǒng),也可以通過接口與外部的位置或力矩或速度傳感器構(gòu)成高精度全閉環(huán)控制系統(tǒng)。
2.4 智能化
智能化是現(xiàn)代工業(yè)生產(chǎn)設(shè)備的一種流行趨勢,也是現(xiàn)代科學(xué)先進(jìn)性的具體體現(xiàn)。交流伺服技術(shù)作為高級的工業(yè)控制裝置,我們也需要將其設(shè)計成智能化的產(chǎn)品。現(xiàn)代交流伺服驅(qū)動器都具備參數(shù)記憶功能,系統(tǒng)的所有運(yùn)行參數(shù)可以通過軟件來設(shè)置,應(yīng)用十分方便。有的交流伺服驅(qū)動器還具有故障自診斷,參數(shù)自整定以及自動調(diào)節(jié)穩(wěn)定性等功能,這些都為伺服用戶提供更好的體驗(yàn)。
3 伺服電機(jī)控制系統(tǒng)的硬件設(shè)計
本系統(tǒng)提供的硬件設(shè)計能夠滿足多種控制算法,它是以TI公司的TMS320F28335為控制核心設(shè)計的。TMS320F28335控制器是一種集成了數(shù)字信號處理核心與外設(shè)的微處理器,也是專門用于電機(jī)控制的DSP。它運(yùn)行速度快,工作時鐘頻率達(dá)到150MHz,功耗低,性能高,可以滿足復(fù)雜控制。
電機(jī)控制卡根據(jù)上位機(jī)的命令產(chǎn)生脈沖序列,脈沖個數(shù)、位置、頻率及頻率變化率、加速度均受主機(jī)控制。微處理器及其外圍電路主要負(fù)責(zé)控制策略和算法的實(shí)現(xiàn)、產(chǎn)生PWM信號、響應(yīng)速度反饋等工作。微處理器根據(jù)控制卡的位置命令值減去位置反饋值來算出電機(jī)位置誤差值,經(jīng)過驅(qū)動單元的數(shù)字濾波器(調(diào)節(jié)算法)產(chǎn)生電機(jī)速度控制信號。其中反饋值是根據(jù)檢測電路中的電磁隔離式霍爾傳感器電路來檢測永磁同步電機(jī)的相電流,之后進(jìn)行A/D轉(zhuǎn)換并作相應(yīng)處理,實(shí)現(xiàn)控制算法。PWM輸出通過光耦傳輸使得傳遞PWM控制信號時控制電路與功率電路隔離。增量編碼器是伺服電機(jī)的反饋元件,它將電機(jī)的旋轉(zhuǎn)角度轉(zhuǎn)換為正交的電脈沖信號,微控制器根據(jù)該反饋信號就能跟蹤電機(jī)的旋轉(zhuǎn)位置。電源模塊將開關(guān)電源提供的+5V電壓變換為+3.3V為系統(tǒng)供電。
4 伺服電機(jī)控制系統(tǒng)的軟件設(shè)計
軟件設(shè)計分為兩大部分:一是電機(jī)卡控制軟件設(shè)計,二是控制器的軟件設(shè)計。對電機(jī)控制卡的控制主要是在上位機(jī)中通過VisualC++進(jìn)行編程,進(jìn)而控制電機(jī)控制卡進(jìn)行瀆寫操作并向控制卡發(fā)出位移、速度、加速度等命令。
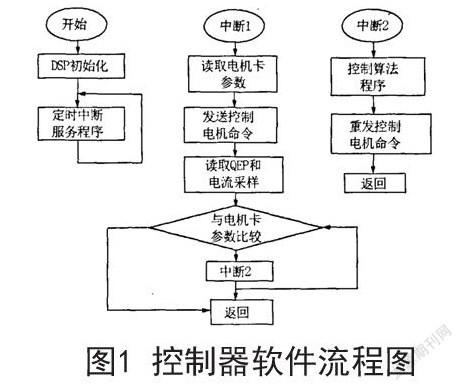
DSP程序由兩個模塊組成,即主程序模塊和中斷服務(wù)程序模塊。主程序模塊主要完成中斷矢量的聲明、內(nèi)存變量的定義、各個功能模塊的初始化等工作;中斷模塊主要是處理電機(jī)控制卡的命令、檢測電路的反饋值、讀取QEP的計數(shù)和控制算法程序Ⅲ。控制器的軟件流程見圖1。
5 結(jié)論
本系統(tǒng)采用了先進(jìn)的全數(shù)字電機(jī)控制算法,實(shí)現(xiàn)了電流環(huán)、速度環(huán)、位置環(huán)的閉環(huán)伺服控制,具備良好的魯棒性和自適應(yīng)能力,可配合多種規(guī)格的伺服電機(jī),適應(yīng)于需要快速響應(yīng)的精密轉(zhuǎn)速控制與定位控制的應(yīng)用系統(tǒng),如數(shù)控機(jī)床、印刷機(jī)械、包裝機(jī)械、造紙機(jī)械、塑料機(jī)械、紡織機(jī)械、工業(yè)機(jī)器人、自動化生產(chǎn)線等。
參考文獻(xiàn)
[1]龍曉軍.基于自抗擾技術(shù)的永磁同步電機(jī)調(diào)速方法研究.大連海事大學(xué)碩士學(xué)位論文,2011
[2]顧問等.基于自抗擾控制技術(shù)的永磁同步電機(jī)矢量控制策略.電源學(xué)報,2011
[3]劉清.基于自抗擾控制器的永磁同步電機(jī)伺服系統(tǒng)控制策略的研究與實(shí)現(xiàn).天津大學(xué)博士學(xué)位論文,2011
[4]李驥.基于DSP的永磁同步電機(jī)矢量控制系統(tǒng)的研究.武漢理工大學(xué)碩士學(xué)位論文.2008
猜你喜歡
體育科技文獻(xiàn)通報(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機(jī)設(shè)計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學(xué)報(2017年2期)2017-07-05 08:13:02
國際商務(wù)財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19