基于語音控制的智能輪椅
2019-09-10 07:22:44賈豪
現代信息科技 2019年8期
摘? 要:本設計基于飛思卡爾Kinetis?KL26P121M48SF4RM單片機,通過LD3320語音芯片接收語音信息,并傳輸到Kinetis?KL26單片機依次通過語音信息預處理、語音信息優化處理和特殊語音信息處理,對采集到的語音信息進行處理,提高對語音命令的執行力與準確性。針對語音信息以及其他傳感器采集到的路況信息進行識別與跟蹤監測。并將語音識別模塊、超聲波傳感器、電機驅動模塊等有效聯結起來,組成了輪椅控制系統的主要部分,經由編程實現了輪椅的自動行駛、自動避障、語音控制等功能。本設計經驗證明完全可以解放使用者的雙手做到輪椅的自由操控,特別是超聲波傳感器的加入更是加大了輪椅的安全保障。
關鍵詞:KL26P121M48SF4RM單片機;語音識別;LD3320
中圖分類號:TN912.34;TP368.12? ? ? 文獻標識碼:A 文章編號:2096-4706(2019)08-0032-03
Abstract:This design is based on Freescale Kinetis?KL26P121M48SF4RM single-chip computer. It receives voice information through LD3320 voice chip and transmits it to Kinetis?KL26 single-chip computer through voice information preprocessing,voice information optimization processing and special voice information processing in turn. The collected voice information is processed to improve the execution and accuracy of voice commands. Speech information and road condition information collected by other sensors are identified and monitored. The speech recognition module,ultrasonic sensor and motor drive module are effectively connected to form the main part of the wheelchair control system. The functions of automatic driving,obstacle avoidance and voice control of wheelchair are realized by programming. The design experience proves that the user’s hands can be freely manipulated,especially the addition of ultrasonic sensors enhances the safety of the wheelchair.
Keywords:KL26P121M48SF4RM MCU;speech recognition;LD3320
0? 引? 言
自步入21世紀,我國的老齡化情況越來越嚴重,隨之老年人面臨的問題越來越多,老年人的陪護問題成為現在的一大難題,越來越多的國家開始致力于功能豐富的輪椅的研究,隨著互聯網技術以及物聯網技術的發展與普及,輪椅向智能化與人性化方向發展,逐漸取代功能單一、體型笨重的輪椅。智能輪將是輪椅發展的一大趨勢。
自1986年英國開始研制第一臺智能輪椅以來,人們就不僅僅關注于傳統輪椅,人工智能賦予了輪椅更實用的功能,因此世界各國都對智能輪椅的研究注入了較大的投資。研究過程總是從簡單走向高級,從最初最簡單的運動、速度控制等到智能性,如具備了較好的交互性、適應性與自主性。
我國在智能輪椅方面的研究雖然起步較晚,在機構的復雜性和靈活性上和國外相比存在著一定的差距,但也根據自身特色研制出技術指標接近國外先進水平的智能輪椅。從整體來看,相較于國外已經部分應用的針對于殘障人士的智能輪椅,我國所研制出的輪椅功能相對簡單,僅限于實現簡單功能控制的聲控輪椅,雖然在一定程度上滿足了部分人的需求,但這并不能滿足部分老年人的更多的需求。因此,本設計主要針對老年人的需求,研究的是基于語音識別的智能輪椅的控制。
1? 設計方案
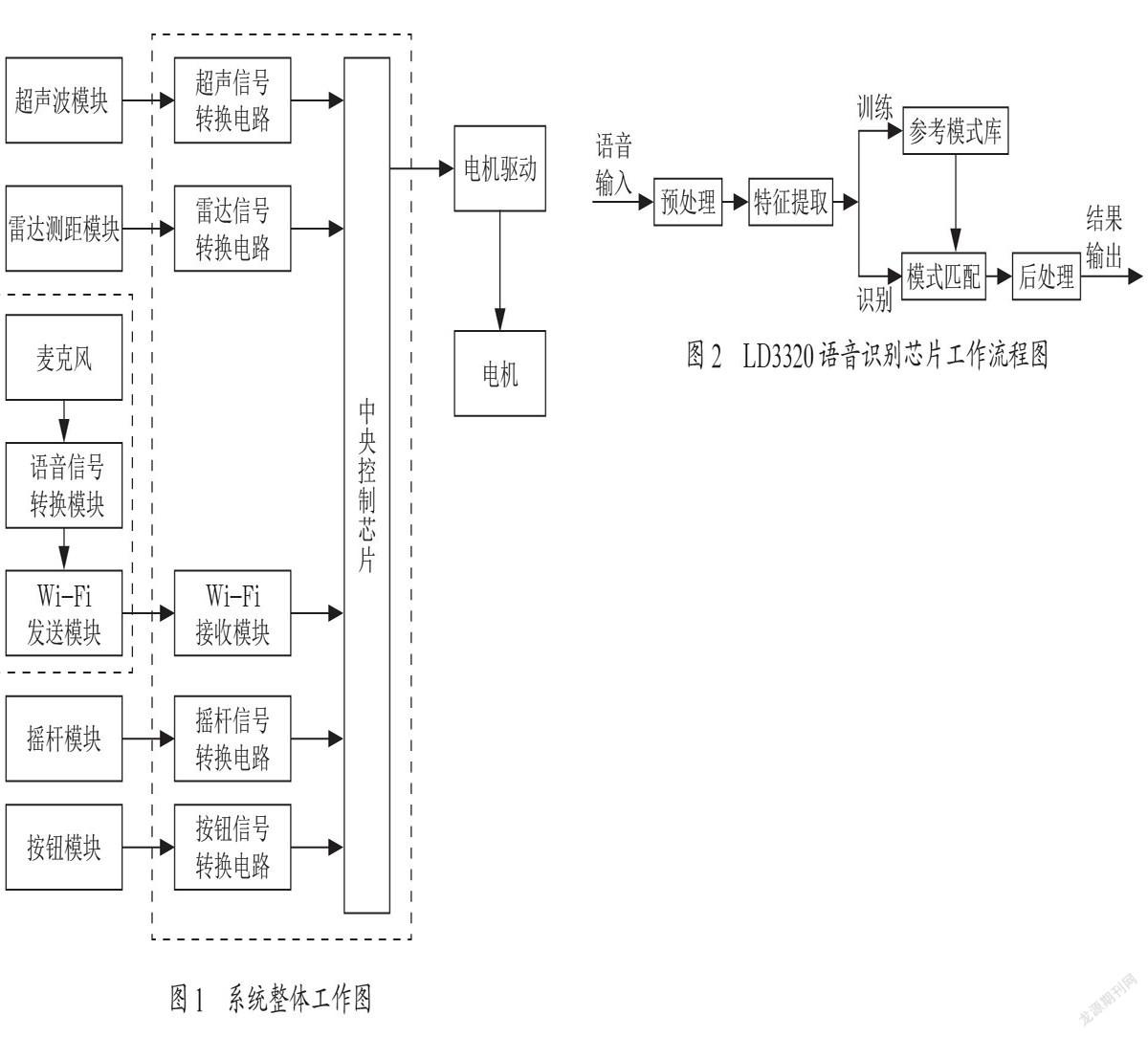
由于輪椅的受眾群體主要是殘疾人和老年人,他們對于輪椅的基本要求主要偏向于價格、故障率、維修是否便利等方面,因此模塊化設計相較于其他方案,是最合適的選擇。本輪椅是由語音模塊、驅動模塊、測距模塊、電源模塊和主控模塊幾部分組成的。語音模塊通過Wi-Fi模塊與主控模塊相連,實現信號的接收與傳輸。驅動模塊、測距模塊、電源模塊通過導線與主控模塊相連接,確保實現最快的響應速度,進而確保整個系統的流暢運行。主控模塊選用飛思卡爾KL26P121M48SF4RM單片機,保證程序完整無誤地正確運行,測距模塊選用雷達模塊與超聲波模塊相結合的方式,確保整車和用戶的安全,語音模塊選用LD3320語音識別模塊,實現經濟與功能的平衡。整體工作圖見圖1所示。
2? 主控模塊
由于輪椅的適用人群較為特殊,因此,安全是首要條件。在滿足安全的條件下進行選擇時,確保輪椅的快速響應與提高輪椅的安全保障至關重要,故主控模塊選用飛思卡爾KL26P121M48SF4RM單片機,運行頻率為180MHz,帶單精度浮點單元和8KB緩存。其多達32通道的DMA用于外設和存儲器,可以降低CPU負載,實現更快的系統吞吐。因此,更快速的系統響應可以使輪椅獲得更佳的反應速度,當用戶下達指令后可以迅速地執行相應的指令,或者當輪椅檢測到障礙物時可以迅速地執行相應的避障功能。
此單片機具有靈活的低功耗模式,運行功耗降至250μA/MHz,靜態功耗降至9.0μA,支持全狀態保留,不到6μS即可喚醒。靜態功耗可低至250nA(VLLS0)。由于此輪椅完全由電能驅動,所以整車系統的運行依靠著一個強大的蓄電池來提供能量。所以,在有限的電能里,應該考慮將盡可能多的電能分配給驅動模塊來使用,盡可能地延長輪椅的續航時間,為用戶提供一個更可靠,更耐久的輪椅,因此,此單片機的低功耗功能完全符合此輪椅的需求。
3? 語音模塊
語音模塊為整個輪椅系統的核心部件,語音控制功能也是此輪椅的一大特色,用戶可以通過語音來控制輪椅的運動。同時,語音識別對于整個設計來講是非常重要的一部分,其識別結果的精準度直接關系到輪椅整體運行的指令,對于其安全性能有著重大的影響。
語音識別的過程主要依靠具有語音識別功能的芯片來完成,其主要的流程包括:通過麥克風進行語音輸入,預處理部分是將輸入的語音內容進行頻譜分析,將分析后的內容進行提取,選取其中具有顯著特點的片段進行標記,標記后的內容與事先準備好的語音參考模式庫中的內容進行匹配,匹配成功再進行處理,最后輸出結果。其流程圖如圖2所示。
LD3320芯片不僅包含了語音識別處理器,還自帶一些外部電路,比如A/D、D/A轉換器、語音輸入接口、語音輸出接口等,這使我們的電路設計變得簡潔,不需要過多的外接電路和輔助芯片。而它所含有的A/D、D/A通道精度很高,可達到我們對于語音高精度識別的要求,而其內部還可實現詞條自主編輯,自主編輯詞條量有50條,完全能夠滿足我們的設計要求。因此,綜合各方面的因素來考慮,在語音識別部分,芯片的選取上,選擇了LD3320芯片。
4? 速度控制模塊
本設計是配合電機模塊進行使用,通過檢測電機轉速實現電機的閉環控制。在設計電機驅動模塊時,采用橋式電路,橋式電機驅動電路主要分為雙極性與單極性兩種,雙極性電機驅電路具有較多的交流輸出電流,容易造成電機消磁并使電機發熱。因而,此次模型搭建選擇采用直流電動機可逆單極型橋式驅動器,其開關元件由4個N溝道功率MOSFET管組成,在額定工作狀態下,它的穩定工作電流可以達到100A以上,很大程度上提高了電動機的轉動力矩和轉動速度。此驅動模塊通過單片機控制可以實現對電機的正反轉控制以及轉速的調節。通過單片機可以實現對電機轉速以及轉向的快速控制。
5? 電機模塊
電機部分的主要任務是實現行走、控速以及剎車等功能,在實現這些功能的過程中,考慮到所需要的不僅僅是定速,還需要滿足在各種情況下能夠高完成度、高精度地執行命令控制的要求。
本系統采用24V直流減速電機3PC36GN-24,這類電機扭力大控制力強,通過與上述電機驅動模塊配合使用,滿足輪椅在運行過程中需要實現的前進、后退等功能,兩個電機分別對稱安裝在輪椅兩側的左、右輪上,從機械方面來看,此類電機具有極好的過載能力和平衡性能,在輪椅運行過程中噪音小,貼合性高。
6? 結? 論
本文主要通過分析日常生活中人們所關注的重要社會問題,引出目前科技進步所面臨的重大課題。基于智能汽車以及無人駕駛車輛,設計出一款基于語音處理的智能輪椅。本設計基于KL26P121M48SF4RM微控制器進行設計,采用LD3320語音芯片作為語音信息采集傳感器,配和其他傳感器進行路況檢測與道路識別。通過模擬道路行駛過程中可能會遇到的路況,設計算法優化語音信息,選擇最佳行駛路徑,最終實現輪椅的穩定、安全、智能行駛,提升了輪椅的智能化與靈活性,解決了目前輪椅存在的諸多問題,具有廣闊的發展前景。
參考文獻:
[1] 郭永強,于喜志,王磊.基于語音識別技術的寫字機器人設計 [J].電子世界,2019(3):126-127+130.
[2] 張琪琛,邸韜.基于語音識別技術的移動機器人控制系統研發 [J].中國標準化,2018(24):245-246.
[3] 任麗莉,丁浩,康冰,等.基于輪式機器人平臺的語音識別系統 [J].長春師范大學學報,2018,37(8):56-58+109.
[4] 周春榮.語音識別技術在機器人控制中的應用 [J].數字技術與應用,2018,36(1):1-2.
[5] 溫昕,謝亮.基于語音識別的機器人研究 [J].科技廣場,2017(7):190-192.
[6] 辛悅夷,李奇達.直流電機控制系統性能評價及控制優化 [J].自動化儀表,2019,40(1):90-94+98.
[7] 侯偉,員三妮.基于模糊PI的三電機同步控制方法研究 [J].工業儀表與自動化裝置,2018(5):60-66.
作者簡介:賈豪(1997.05-),男,漢族,山東菏澤人,本科,研究方向:自動化。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
電子設計工程(2015年15期)2015-02-27 12:07:30