基于超聲波的管道測厚行走裝置的設計
2019-09-10 07:22:44李庚王軍民呂志杰李方旭晏宇唐銀海
河南科技 2019年7期
李庚 王軍民 呂志杰 李方旭 晏宇 唐銀海

摘 要:本設計主要利用Arduino軟硬件開發平臺,通過上位機對裝置實現前進、后退及其他元件的操作,將測得數據通過無限通信模塊進行傳輸,并將測得的數據以txt的文本格式存儲在SD卡上。該裝置可以在惡劣的環境下代替人進行測厚工作,具有良好的應用前景。
關鍵詞:Arduino;上位機;無線傳輸;測厚
中圖分類號:TE973 文獻標識碼:A 文章編號:1003-5168(2019)07-0051-03
Abstract: This design mainly usedArduino software and hardware development platform to realize the operation of forward, backward and other components through the upper computer. The measured data weretransmitted through the infinite communication module, and stored on the SD card in the text format of txt. The device can measured thickness instead of human in harsh environment, and has a goodapplication prospect.
Keyword: Arduino;host computer;wireless transmission;thickness measurement
近幾年來,無損檢測技術不斷發展,使得超聲高頻反射技術已經引起了各行各業的廣泛關注。因為超聲波能夠穿透非常多的部件,所以可以運用超聲波檢測技術讓這些部件內部構造的特征輕易呈現。超聲檢測技術其實就是把無形的東西轉換成可以識別的圖形,進而使部件內部的結構特征能夠讓人們通過圖形觀察出來[1]。傳統的超聲波測厚儀應用廣泛,如石油化工業、電站、汽車制造、機械制造業,可以測量船殼、甲板、鍋爐、管道、儲油罐、軌道[2]。本文主要對傳統的手持測厚儀的方法進行改進,設計了一種基于Arduino單片機的管道測厚行走裝置。該設計主要以Arduino單片機為控制核心,同時以串口HMI作為上位機,并配備無線通信模塊,在使用的過程中可以通過上位機對行走裝置進行監測和控制,該裝置具有操作便捷、穩定性好等特點。
1 系統設計
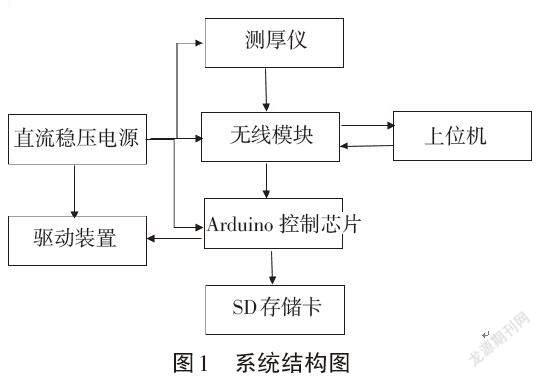
如圖1所示,該系統結構框架圖主要由以下幾部分組成:直流穩壓電源、驅動裝置、測厚儀、無線模塊、Arduino控制芯片、SD存儲卡及上位機。工作原理是操作命令由上位機給出,通過無線模塊將其命令傳遞給Arduino控制芯片,Arduino通過控制指令使行走裝置實現各種位移功能,同時通過命令使測厚儀裝置將測出的數據也通過無線模塊傳遞給Arduino控制芯片,最后通過命令將其保存在SD卡上。
2 硬件部分
2.1 Arduino
Arduino開發板(見圖2)是一款開源的單片機開發平臺,是基于Lunix內核來實現的,主要由一塊AVR單片機、一個晶振和一個5V直流電源,外加各類接口構成[3]。開發板與計算機程序進行交互是通過USB數據接口實現的。在官方IDE中編寫程序代碼后進行修改,直至無錯誤后將程序通過USB接口上傳到Arduino開發板,開發板上的單片機進行程序的執行與數據的處理。
2.2 驅動裝置
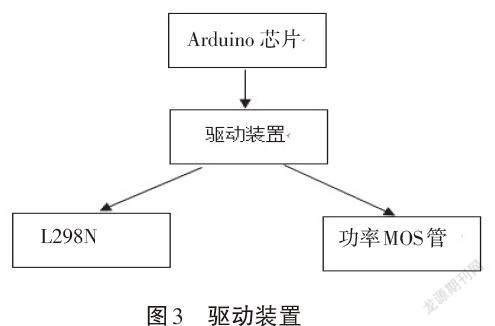
如圖3所示,通過Arduino實現對行走驅動裝置的控制,而行走裝置主要依靠L298N電機以及MOS管驅動。
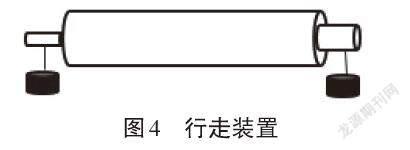
行走裝置(見圖4),主體是一個凸出可以自由伸縮的細管,在管的頂端和該主體的尾端各自接上圓弧形的磁鐵,使其完全貼合要測管道的內壁。該行走裝置主要通過L298N與大功率MOS管實現位移以及停止的操作。
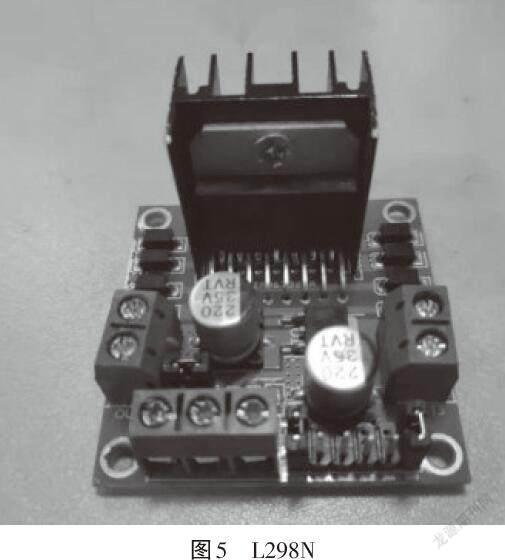
L298N(見圖5)內置的兩組H橋用來維持電機兩端的電壓始終處于高低電平之間,該模塊的兩種供電模式不僅可以供電給開發板,還可以驅動和控制兩路電機,當使能端ENA、ENB處于高電平或者低電平狀態時,對于L298N電機引腳N1、N2,不同的接法會形成不同的組合,電機也就會處于不同的狀態,這樣便可以對行走裝置進行位移操作[4]。
功率MOS管一般采用N溝道增強型垂直式結構,在漏極區都有一個n-的漂移區,n-的漂移區的摻雜濃度比p基極區小,所以,當正電壓加于漏極上時,漏極p基極被反向偏壓,大部分的耗盡區寬度將跨過n-的漂移區。因為,在偏移區內形成電流的電子全部是多子,所以在高阻的n-區不會出現兩種載流子泛濫的情況。因此,功率MOS管是一個單極型元件[5]。
2.3 無線模塊
數據無線傳輸模塊使用的是一款基于100MW的無線數傳,工作在2.4~2.518GHz頻段,使用串口進行數據收發,降低了無線應用的門檻;其功率密度集中,傳輸距離遠、速率高,且全雙工,可以雙向同時通信,支持文件傳輸;TTL電平輸出,兼容3.3V與5V的IO口電壓[6]。
該模塊的典型特點是高速傳輸,在多種波特率下,可以雙向同時收發(全雙工),傳輸的數據不限包長,支持不間斷傳輸,支持文件傳輸。該無線傳輸模塊有4種工作模式,是由引腳M0、M1的不同組合來進行設置。
2.4 測厚儀部分
超聲波測厚儀的測厚原理就是超聲波會通過超聲波探頭發射出去,在測量時將探頭與被測物體貼合,在進行測厚時超聲波探頭會有波發射出去,由于超聲波與光波類似,會有反射的特性,因此會有一部分的超聲波反射回來,據此可以計算超聲波探頭發射波與反射波之間的時間差;同時,由于超聲波在不同介質中的傳播速度是已知的,這樣就可以計算出被測物體的厚度[7]。根據超聲波在不同介質中的傳播速度以及反射波與發射波的時間差,就可以得出厚度的計算公式:
[H=12V×T] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (1)
式(1)中,[H]表示最終計算的厚度值,[V]表示超聲波不同介質中的速度,[T]表示兩次的時間差。
2.5 SD儲存卡
對測量的數據以txt的格式進行保存。
3 軟件設計
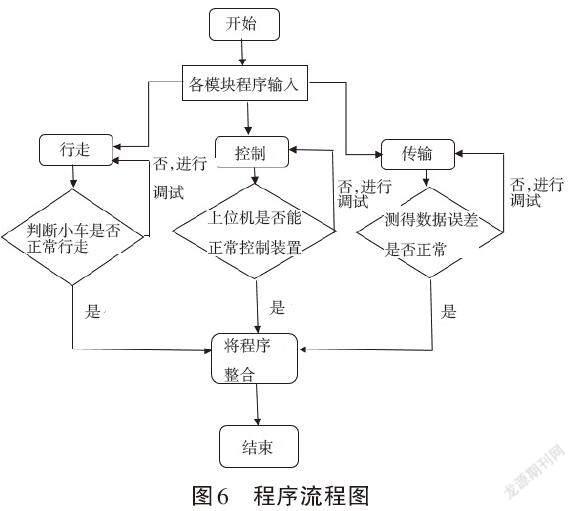
軟件部分采用模塊化設計,主要分為主程序、無線數據傳輸程序、小車運動控制程序,程序流程圖如圖6所示。前期將各個模塊的代碼導入Arduino控制板進行所寫代碼的功能測試,只有當行走、控制、傳輸模塊的代碼測試無誤后才能進入下一步的代碼整合測試,否則只能返回上一步進行Bug修改,直到代碼測試正確為止。當所有模塊的功能測試完成后,將其完整的程序導入Arduino進行最終的實踐測試。
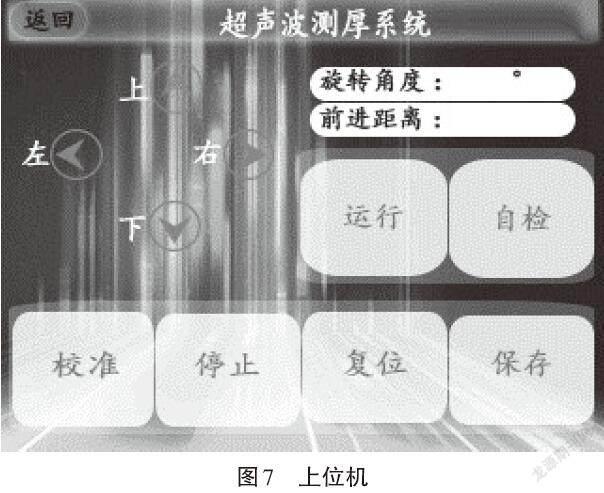
上位機的界面主要由USART HMI來實現的,HMI是Human Machine Interface的縮寫,被稱為“人機接口”,也叫人機界面。人機界面是系統和用戶之間進行交互和信息交換的媒介,它實現了信息的內部形式與人類可以接受形式之間的轉換[8]。HMI在日常生活中十分常見,它的主要特性可以通過軟件配置把I/O配置成輸入狀態或輸出狀態,同時支持4種不同的通信接口(TTL、RS232、RS485、CAN),支持的接觸類型有電容觸屏與電阻觸屏,它在通電進入工作狀態時無需進行初始化設置,同時該界面不僅能提供用戶時間存儲空間,而且可以通過窗口的指令調整背光。設計的上位機如圖7所示,為了實現該裝置在實際的工作環境中的行走以及數據傳輸的功能等,該上位機的設計功能有行走的控制、前進距離的顯示、校準、停止、復位、保存數據等功能。
4 總結
本設計只是對傳統的手持測厚方案進行了改進,主要運用Arduino與無線模塊,使測得的數據實現了無線傳輸,同時可以通過上位機對裝置進行命令操作,從而完成測厚的操作,該系統操作界面簡潔、操作方便,且體積小,便于攜帶。
參考文獻:
[1]張旭輝,馬宏偉.超聲無損檢測技術的現狀和發展趨勢[J].機械制造,2002(7):24-26.
[2]柯細勇,王占元,楊劍峰,等.一種新型便攜式超聲波測厚儀的設計[J].傳感器與微系統,2011(12):119-122,125.
[3]古訓,張仁興.多功能智能導盲手杖設計與實現[J].貴陽學院學報,2016(4):40-45.
[4]張天鵬,徐磊.L298N控制直流電機正反轉[J].工業設計,2011(3):98-99.
[5]沈昂.大功率電源MOS管的特性及應用[J].上海計量測試,2005(6):28-29.
[6]郭京波,張潮,趙偉行,等.基于nRF24L01無線模塊的消防泵巡檢監測系統設計[J].消防科學與技術,2018(9):74-77.
[7]高江磊.基于FPGA的超聲波隔油測厚系統的設計[D].石家莊:河北科技大學,2015.
[8]劉寺杰,徐敏,張晨宇,等.基于HMI智能串口屏顯示的溫濕度測量系統[J].科教導刊(下),2018(8):59-60.
