處理消像旋的數字控制方法
2019-09-10 07:22:44張冬生劉杰
中國軍轉民 2019年7期
關鍵詞:仿真
張冬生 劉杰
摘要:針對目前周視式光電觀察瞄準系統中機械連桿傳動裝置以實現光學消像旋的情況,提出并改造了原有的傳動系統,建立系統數學模型,對控制系統的典型情況進行仿真。仿真結果表明,該設計數字控制硬件平臺能夠滿足精度和實時性能指標的要求,提高了系統的穩定性和可靠性。
關鍵詞:消像旋;位置傳感器;直流電機;位置控制器;仿真
引言
在許多潛望式周視光電觀瞄系統中,不但有可見光,有的還增加了電視、紅外、微光觀瞄系統。在該系統中,需要用電視或紅外成像精確地瞄準目標。消像旋是圖像處理的一個重要應用方向,它是將一幅被旋轉過的圖像進行較正處理,以便得到正的圖像,其無論在軍事還是在民用上都被大量采用。在周視光電系統中采用數字化控制的光學消像旋系統將是一個最佳選擇,其優點是實時性好、高速度、圖像無失真,它不僅可以提高消像旋的準確性、快速性以及實時性,而且可以簡化機械設計,提高調試效率、操控性和售后維修質量等。對于最終應用到軍工產品具有很大意義。
1 控制對象的機理建模
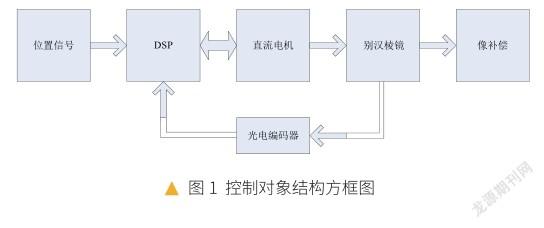
控制對象結構的框圖見圖1,其中關鍵部分通過DSP系統對電機傳動系統的驅動控制。
控制對象中的齒輪傳動系統對別漢棱鏡組件進行比例傳動,電機和RS22絕對式編碼器是同軸的,電機的驅動信號由電路板上的MSK4200功率模塊輸出,其位置信號通過RS22編碼器解算并反饋給控制電路板的接收模塊進行處理。
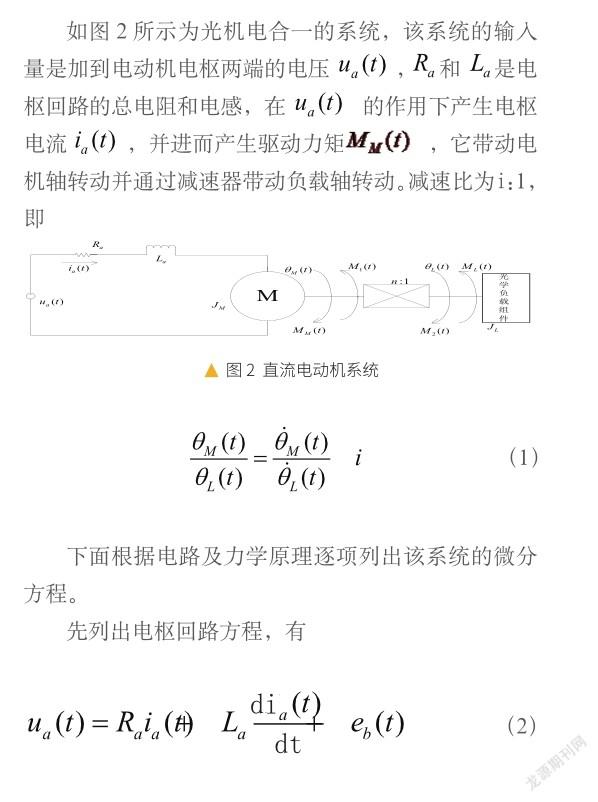
2 控制對象數學模型

4系統電路模塊組成
本文設計的電路控制硬件由DSP模塊、R/D模塊、D/A模塊、通信模塊、電機驅動模塊、鍵盤輸入顯示模塊及電源復位電路模塊等組成。
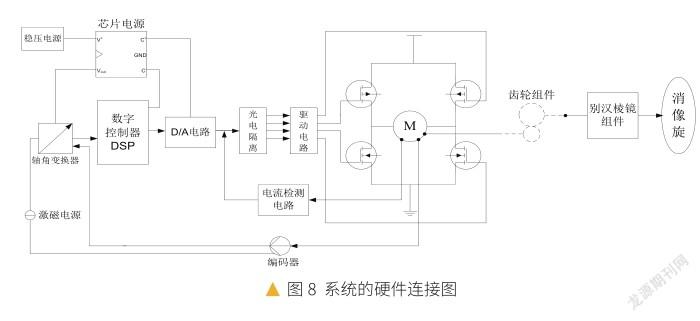
系統電路的硬件連接圖如圖8所示。硬件電路可以分為三部分:主控制電路模塊、功率驅動模塊和位置檢測模塊。主要控制電路模塊DSP為核心,外圍電路主要包括:調試仿真接口電路、串行通信接口電路、模擬控制接口、數字模擬轉換電路和輸入/輸出接口等。功率驅動電路包括驅動模塊、保護電路、轉子位置檢測電路等。位置檢測模塊主要包括編碼器轉換電路和字符串和數字轉換電路等。
5系統的軟件設計
5.1 控制系統的主程序結構
TMS320F2812 DSP具有豐富的外圍模塊和中斷資源,大大提高了程序編寫的靈活性。其主要完成的任務是DSP系統的初始化、中斷使能、參數定義及功能模塊單元的參數初始化等。
5.2 位置讀取子程序
程序進入主中斷程序后,首先運行的子程序即為位置讀取子程序,它也是最重要的子程序(略)。
6系統性能分析
本文控制系統實驗平臺是在潛望式車長周視系統的基礎上建立起來的,實驗平臺由像傾斜儀、車長周視鏡、控制和驅動電路板、電機傳動系統、模擬發送檢測儀、電源箱、操控臺以及固定裝置等組成。
系統響應分析采用階躍響應分析 。
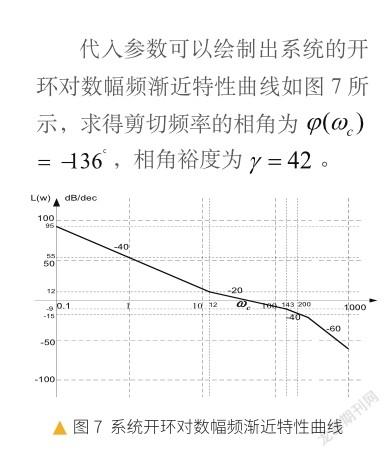
從系統開環傳遞函數測試結果可以看出數據處理所需時間為60μs,滿足一般高精度數字控制系統的要求。本設計中設定采樣周期1ms,即系統的控制頻率為1kHz。
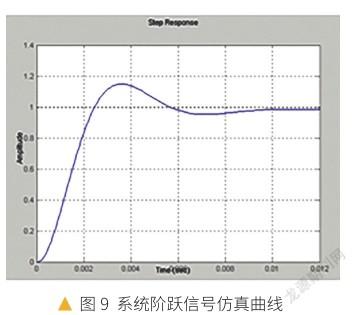
為系統加入階躍信號,仿真曲線如圖9所示。
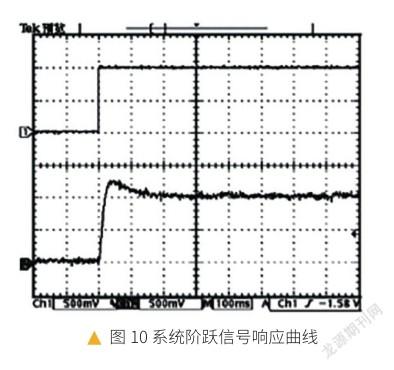
同時在系統試驗中用示波器測量得到階躍響應曲線如圖10所示,圖中上方的曲線為給定階躍信號曲線,下方的曲線為系統的響應曲線。可以看出,上升時間約為20ms,峰值時間約為40ms,調節時間約為120ms,超調量約為18%。
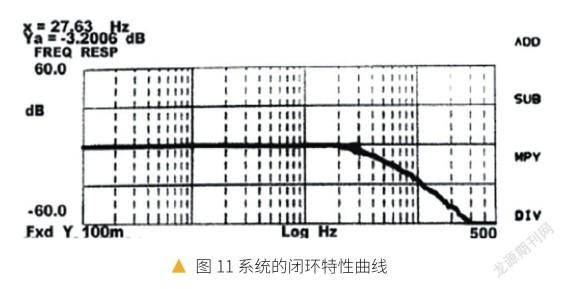
經掃頻得到系統的閉環特性曲線如圖11所示,系統閉環帶寬約為28Hz。
實驗表明,在動態環境中,從圖像穩定系統擾動指令的輸出穩定恢復時間約0.25s,略高于理論計算瞬態時間,觀察者不會感到閃爍的圖像,滿足速度的要求和系統的實時性能。
參考文獻:
[1] 童詩白,華成英.模擬電子技術基礎[M].北京:高等教育出版社,2000.
[2]廖曉鐘,劉向東.自動控制系統[M].北京:北京理工大學出版社,2005.
[3] 杜坤梅,李鐵才.電機控制技術[M].哈爾濱:哈爾濱工業大學出版社,2002.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
