基于背景感知相關濾波的無人機目標跟蹤算法
2019-09-12 10:41:42蘇婷婷郝禹哲顧佳欣
智能計算機與應用 2019年4期
蘇婷婷 郝禹哲 顧佳欣
摘 要:四旋翼無人機可廣泛適用于各種地形中,完成目標物的實時捕捉、動態跟蹤等任務,商用前景非常可觀。本文針對無人機目標跟蹤問題,設計了一種基于背景感知相關濾波的目標跟蹤系統。背景感知相關濾波算法與現有文獻中的目標跟蹤算法相比,其優勢在于提取深度特征與空間約束相結合,目標跟蹤擁有更高的實時性與準確性。實驗結果表明,本文設計的無人機目標跟蹤算法能夠有效地識別與跟蹤預設目標,本系統具有一定的應用價值。
關鍵詞:四旋翼無人機;目標跟蹤;相關濾波;背景感知相關濾波
文章編號:2095-2163(2019)04-0192-03 中圖分類號:TN2 文獻標志碼:A
0 引 言
相較于大型飛行器,四旋翼無人機可應用于眾多復雜地形中實現垂直起落、懸停等任務,是完成目標實時捕捉動態跟蹤的硬件支撐平臺。
在無人機目標跟蹤領域,一些有效的目標跟蹤算法相繼被提出。均值漂移(Mean shift)算法[1],通過對特征樣本點的分析,對圖像進行平滑和分割處理,反復迭代找到與目標最接近的位置,但此算法不適用于在復雜環境中變化的運動物體,目標大小形狀改變也會對跟蹤結果造成很大影響。基于卡爾曼濾波的目標跟蹤算法[2],是通過線性系統的優化最小方差預測目標物體的運動狀態,但此算法精度仍需改良。基于粒子濾波的目標跟蹤算法[3],通過大量粒子的采樣與重新擴散,近似得到運動目標的狀態,但此算法計算量大,不適用于實際環境中的目標跟蹤。在實際應用中,通常使用多種算法相結合以提高目標跟蹤的實時性與準確性。
在前人的基礎上,本文設計了一種基于背景感知相關濾波(Background-aware correlation filters,BACF)算法[4]的無人機目標跟蹤系統。該系統可對于處在復雜背景下運動目標的HOG特征(方向梯度直方圖)進行檢測與提取,利用改進的相關濾波算法實現在一定區域內自動識別指定目標,一旦識別到指定目標,無人機將會自動鎖定該目標,對其進行自主跟蹤。
1 基于背景感知相關濾波的無人機目標跟蹤
1.1 背景感知相關濾波算法
在目標跟蹤過程中,目標通常不是靜止的,其運動軌跡的不規則性加大了實時目標檢測跟蹤的難度。本文在對移動目標進行識別時,采用傳統的相關濾波算法,通過加空間約束的方式去除訓練相關濾波所存在的邊界效應,并基于HOG特征提取,實現在復雜背景下對目標物體的實時跟蹤。
傳統的相關濾波算法[5]通過已經跟蹤的若干幀中目標的位置,提取出對目標有較好鑒別力的特征,訓練出一個濾波器模板,對于新幀中可能出現的目標區域,提取出該區域特征,與濾波器模板作相關處理。根據相關值得到在新幀中目標的預測位置,并以該位置為中心提取出特征,反過來進一步訓練濾波器模型,并反復上述步驟進行后續的目標跟蹤訓練。
由于傳統的相關濾波算法是基于模板的相關性匹配方法,目標背景并不是隨時間改變的,對于快速運動目標的實時檢測的效果并不能取得滿意的性能,且目標檢測的實時性不高。為了解決上述問題,確保算法能夠在實際環境中對目標物體較好地識別與實時檢測,本文將HOG特征提取與空間約束算法進行有機結合。通過有效地模擬目標物體的背景隨時間變化的模板,利用空間約束的相關濾波算法解決邊界效應,提取多通道HOG特征進行目標檢測與跟蹤。
在濾波器求解過程中,利用相互獨立的多特征通道,去除訓練相關濾波存在的邊界效應,再通過ADMM(交替方向乘子法),把一個大優化問題分成可分布式同時求解的多個子問題,通過對子問題的迭代可以快速得到濾波器的近似最優解,最終實現對于目標物體的實時檢測跟蹤。
1.2 無人機目標跟蹤設計
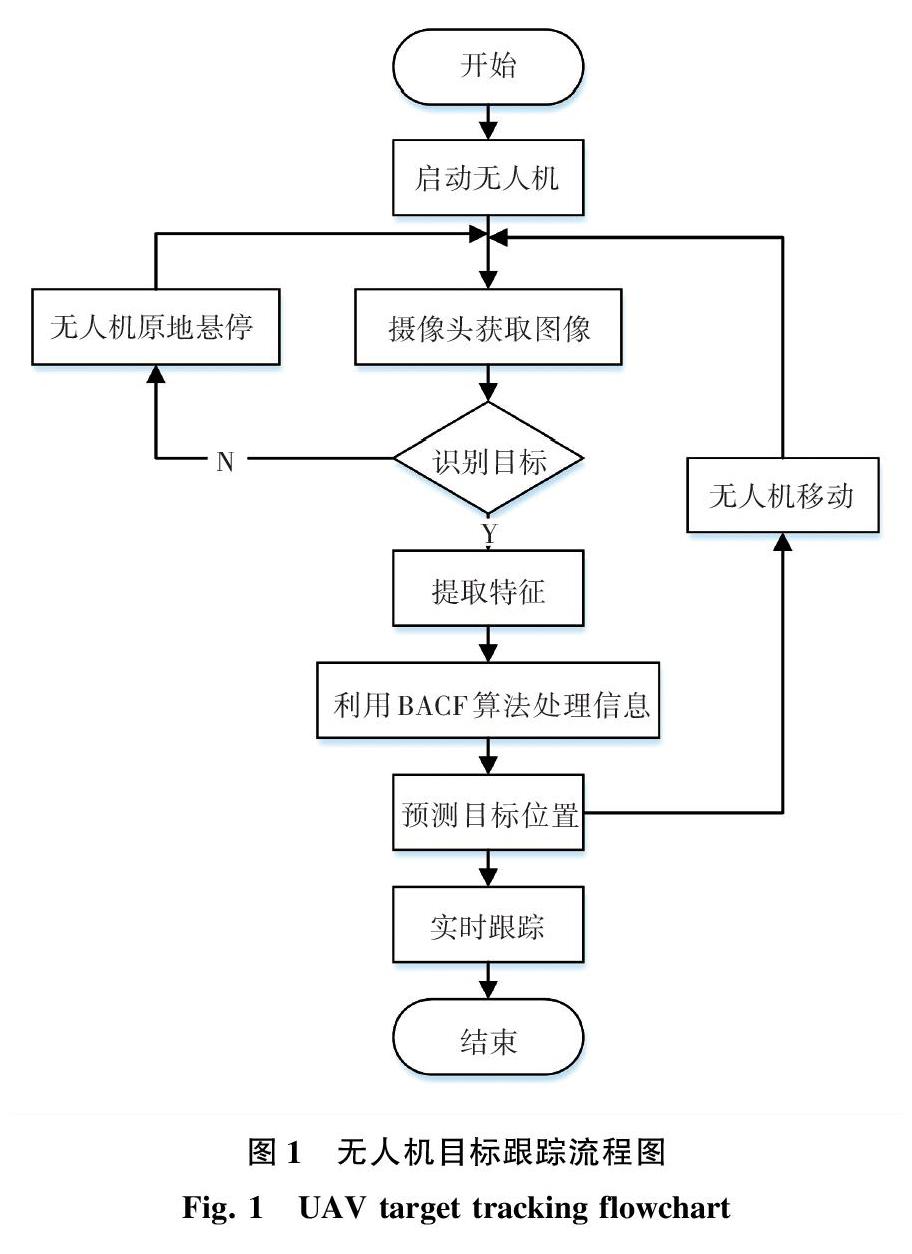
目標跟蹤流程如圖1所示。本文所設計的無人機目標跟蹤系統在進行實時跟蹤的主要流程如下:首先啟動無人機,通過無人機所搭載的攝像頭獲取圖像,當無人機未捕捉到預設目標物體時,將維持原地懸停狀態,并返回重新捕捉目標物體。當發現目標物體,無人機將信息傳遞給地面站,通過提取目標物體的特征,利用BACF算法處理信息,得到預測目標物體位置,無人機移動,重新獲取圖像,如此反復,最終實現對目標物體的實時檢測與跟蹤。
2 實驗結果與分析
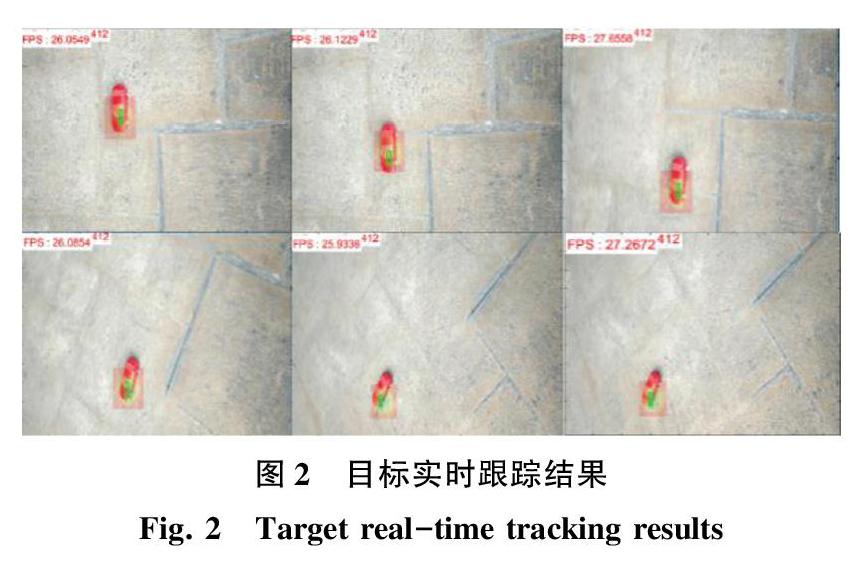
為了評估本文提出的基于背景感知相關濾波的無人機目標跟蹤算法的有效性,搭建了一個四旋翼無人機硬件仿真平臺,選用紅色遙控小車作為目標物體,根據上述的背景感知相關濾波算法,利用Keil軟件環境進行編程仿真。系統仿真結果如圖2所示。當遙控小車按照一定軌跡運動時,無人機能夠較好地識別與跟蹤小車,且系統的實時性也較好,能夠滿足一些場景應用。但仿真過程中發現,當小車受到遮擋或者光照較暗時,本文提出的算法的性能仍然需要進一步改善。
3 結束語
本文設計了一種基于背景感知相關濾波算法的無人機目標跟蹤系統,該系統可對于處在復雜背景下的運動目標的HOG特征(方向梯度直方圖)進行檢測與提取。利用改進的相關濾波算法實現在一定區域內自動識別指定目標,進而進行目標跟蹤。本文算法對于無遮擋目標和正常光線下的目標能夠較好地識別與跟蹤,且具有一定實時性。未來人們將對目標被遮擋和光線較暗環境下的無人機目標跟蹤問題進行深入研究。
參考文獻
[1]田莘. 基于MeanShift算法的目標跟蹤問題研究[D]. 西安:西安科技大學,2010.
[2]RIDDER C, MUNKELT O, KIRCHNER H. Adaptive background estimation and foreground detection using Kalman-filtering[C]//Proceedings of International Conference on Recent Advances in Mechatronics. Istanbul, Turkey:ICAM, 1995, 193-199.
[3]王法勝,魯明羽,趙清杰,等. 粒子濾波算法[J]. 計算機學報,2014,37(8):1679-1694.
[4]GALOOGAHI H K, FAGG A, LUCEY S. Learning background-aware correlation filters for visual tracking[C]//IEEE International Conference on Computer Vision. Venice, Italy:IEEE, 2017:1144-1152.
[5]張紅穎,胡文博. 多特征融合的尺度自適應相關濾波跟蹤算法[J]. 系統工程與電子技術, 2019,41(5):951-957.
