環行鐵道城軌試驗線列車位置實時監測方案研究
2019-09-19 11:08:10柴金川張金月
鐵路計算機應用 2019年9期
柴金川,張金月,張 鄖,于 海,楊 鐸
(中國鐵道科學研究院集團有限公司 國家鐵道試驗中心,北京 100015)
環行鐵道城市軌道交通試驗線(簡稱:城軌試驗線)作為城市軌道交通綜合試驗平臺,在城軌領域科研試驗發揮著重要作用。城軌試驗線正線全長8.63 km,其中,地面線長6.92 km,高架橋長785 m,隧道長925 m,夾直線長度為1 463 m。城軌試驗線沿線鋪設光纜槽道及光纜,并配置了采用IEEE802.11g WLAN車地無線通信承載的國產MTC-I型CBTC系統和計軸系統,沿城軌試驗線每隔300 m左右設置無線接入點(AP)并采用A/B雙網覆蓋,城軌試驗線平面圖如圖1所示[1]。隨著城軌科研試驗需求的增加,城軌試驗線承載的試驗任務越來越多,需要通過實現列車位置監測功能,擴展城軌試驗線多維試驗空間,并提高保障城軌試驗線試驗安全的能力。
目前,國內外軌道交通中列車定位方式主要包括傳感器定位[2]、軌道電路定位[3]、計軸系統定位[4]、無線網絡定位[5]、衛星定位[6]以及移動裝備運行行程定位方式等。在我國軌道交通運營中,除青藏鐵路采用了基于GPS和列車慣性輔助定位方式[7]外,鐵路CTCS-3系統采用傳感器加列車慣性輔助定位方式[8],鐵路CTCS-0至CTCS-2列控線路以及站場均采用軌道電路定位方式;城市軌道交通CBTC系統采用傳感器加列車慣性輔助定位方式[9],CBTC降級及站場采用軌道電路或計軸系統定位。上述每一種定位方式都有特定的適用場景,且每一種定位方式都存在不同特征和性能。本文通過綜合分析現有各種定位方式的應用場景及特征、性能,結合城軌試驗線既有實際環境,提出城軌試驗線可以采用分布式光纖振動定位方式[10]和增強系統衛星定位方式[11],通過驗證表明,這兩種方法在城軌試驗線列車定位監測中具有較好的適用性,可以作為現有技術手段的有效補充,在城軌試驗線列車定位監測中發揮重要作用。
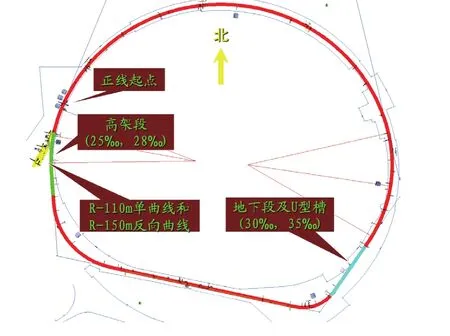
圖1 城軌試驗線平面示意圖
1 典型定位方式分析
1.1 RFID傳感器定位方式
1.1.1 基本原理
射頻識別(RFID,Radio Frequency Identification)傳感器是一種通過無線電信號識別特定目標并讀寫相關數據的自動識別技術。RFID 傳感器具有使用壽命長、環境適應性好、無需識別系統與特定目標之間建立機械或者光學接觸等優點。RFID傳感器由射頻標簽、閱讀器及天線3部分組成。射頻標簽附著在目標對象上,并由唯一的電子編碼標識目標;閱讀器是一種用于讀取(有時也可以寫入)射頻標簽信息的手持或固定設備;天線用于閱讀器和射頻標簽之間利用發射或接收射頻信號而傳遞信息。具體工作原理為:射頻標簽感應到閱讀器的射頻信號磁場后,將感應到的磁場能量轉換成存儲在芯片中信息的信號(無源標簽)發射出去,或主動將某一頻率的信號(有源標簽)發射出去;閱讀器接收到射頻標簽信號后,經過解碼和數據處理轉換成相應的信息并作出相應的動作。RFID 基本工作原理如圖2所示。
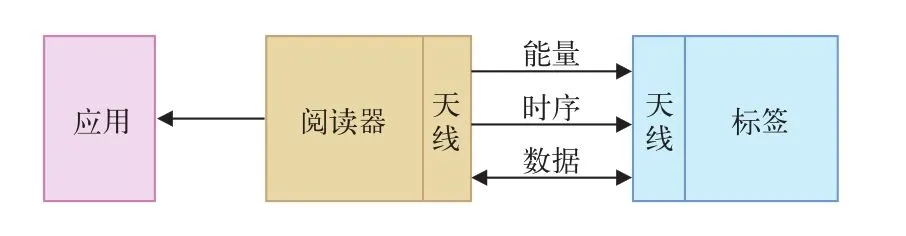
圖2 RFID傳感器組成
1.1.2 適用性
RFID傳感器僅能實現不連續的點式定位,不適用于單獨承擔城軌試驗線列車定位。
1.2 鐵路CTCS-3與城軌CBTC的列車定位方式
1.2.1 基本原理
鐵路CTCS-3與城市軌道交通CBTC的列車定位原理基本相同,如圖3所示。列車通過應答器與列車慣性定位結合獲得當前位置信息,并利用無線通信平臺將實時位置信息傳輸到地面系統。具體工作原理為:列車首先在某點獲得位置信息,并在運行過程中通過列車上安裝的傳感器監測獲得列車運行速度、時間、距離計算出當前列車的位置。由于列車在運行過程中會出現位置計算的誤差累計現象,因此需要在軌道上每隔一段距離安裝一組應答器使列車在應答器處進行位置校準。鐵路CTCS-3與城市軌道交通CBTC的列車定位可實現車上和地面同時監測列車位置信息,但對列車自身慣性定位系統依賴較高。
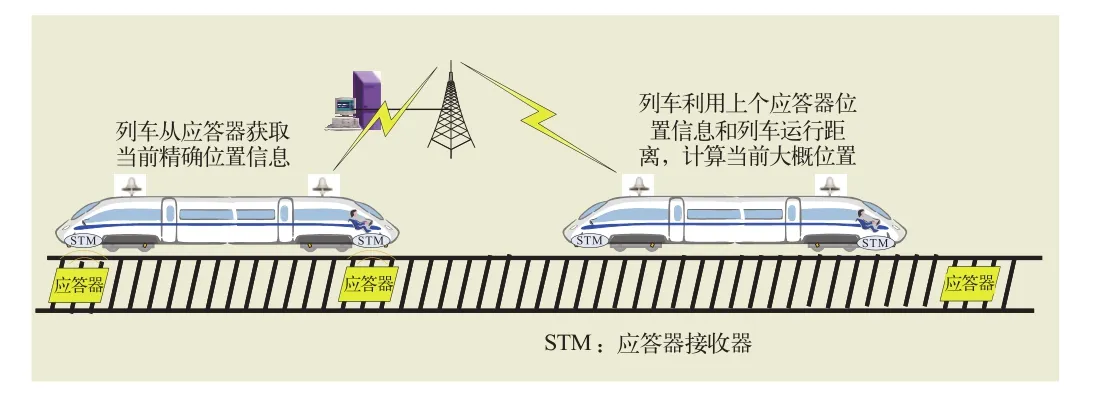
圖3 鐵路CTCS-3與城軌CBTC的列車定位原理示意圖
另外,鐵路和城市軌道交通中檢測車的檢測數據定位與鐵路CTCS-3和城市軌道交通CBTC列車定位的原理相同,不同之處為將安裝在軌道上的應答器改為安裝在接觸網桿或隧道壁上的電子標簽(一種RFID傳感器)。相對于應答器,通常電子標簽設置密度較大,且間隔相對較均勻,連續定位的精度比CTCS-3和CBTC略強。
1.2.2 適用性
國內各地方各城軌線CBTC制式眾多,且兼容性較差,城軌試驗線既有CBTC僅能與具有相同車載CBTC制式列車匹配,與國內大多數城軌列車車載CBTC制式不匹配。如果利用CBTC實現所有列車定位,或者花費大量資金在地面配置多種制式CBTC系統,或者購買既有地面系統相匹配的車載CBTC定位系統并與試驗列車既有系統互聯互通。在地面配置多種制式CBTC系統且僅為實現列車定位意義不大,因此不予考慮。購買既有地面系統相匹配的車載CBTC定位還需與每一輛城軌試驗列車車載系統相匹配,可操作性較低,因此也不予考慮。
鐵路CTCS-3的列車定位與CBTC的列車定位方式等效,且城軌試驗線及城軌列車均無CTCS-3設備。因此鐵路CTCS-3的列車定位不適用于城軌試驗線。
基于電子標簽和列車慣性的定位方式目前僅限于檢測列車應用,城軌試驗線承擔檢測列車試驗較少,可考慮作為檢測列車的定位方式。
1.3 計軸系統與軌道電路系統定位方式
1.3.1 基本原理
計軸系統定位方式為將軌道劃分成許多區間,并在區間的兩端同時設置一組車輪傳感器即計軸探頭,當列車的金屬車輪經過計軸探頭時,計軸探頭會感應到車輪通過并能判斷出通過列車車輪的數目,并將檢測到的車輪信息經電纜傳到計軸主機,如圖4所示。計軸主機根據檢測到的數據即可計算出進入該區間和離開區間的車輪數量,通過比較分析,給出區間的空閑或占用,從而根據列車所在的區間判斷列車位置。
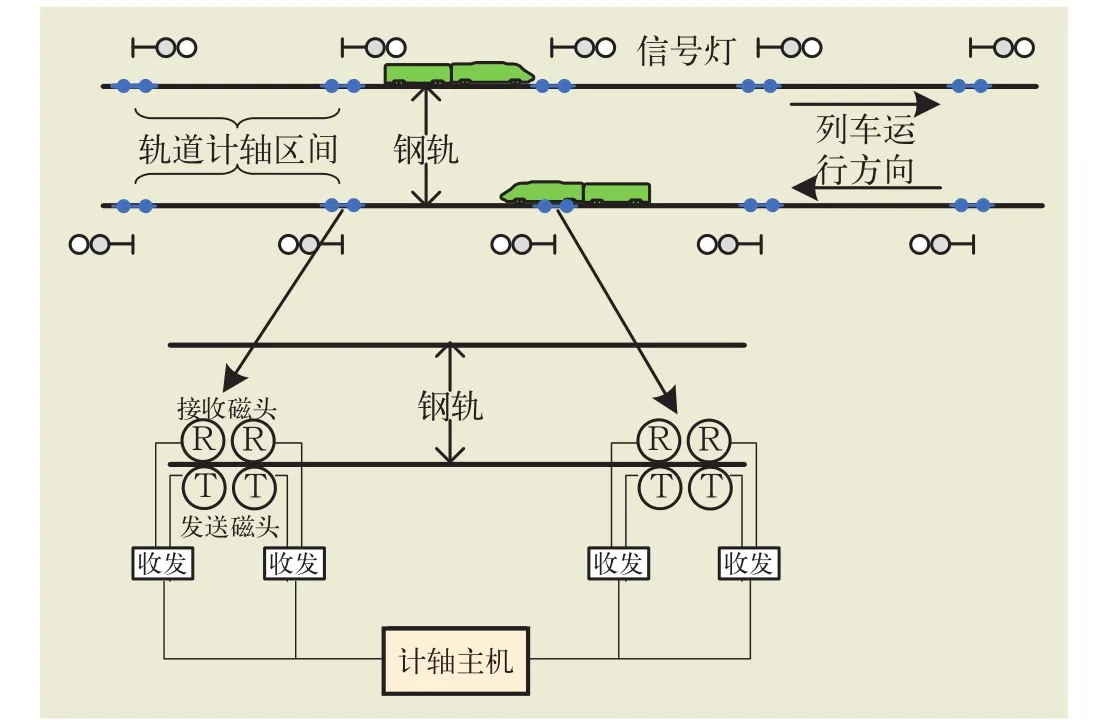
圖4 計軸系統列車定位示意圖
軌道電路定位與計軸系統定位相似,如圖5所示。把軌道線路劃分成若干軌道區段,通過判斷列車占用某區段,確定列車在該區段范圍內。具體工作原理為:將列車作為左右兩根軌道的傳導體,當某區間沒有列車即空閑時,軌道電路的發射端電源通過鋼軌與軌道電路的接收端形成閉合電路,使繼電器勵磁從而接通綠色顯示電路。當列車進入該區間時,列車作為傳導體使軌道電路端部電流減弱,使繼電器消磁從而接通紅色顯示電路,表示該區段被列車占用。地面系統根據軌道區段占用信息判斷列車位置。

圖5 軌道電路列車定位示意圖
1.3.2 適用性
計軸系統定位不具備連續性;僅能判斷列車在某大區間范圍內,定位精度很低,且區間設置越長,精確度越低。多輛列車在同一固定區間內,無法準確判斷區間內列車的具體位置和同一區間內相鄰列車的距離;同理,相鄰區間內兩列相鄰的列車無法判斷相互之間的距離。由于城軌試驗線上列車運行沒有規定的運行圖,列車運行速度及占用軌道的位置較隨意,計軸系統定位無法滿足靈活、精確的列車定位需求。鑒于城軌試驗線已經具有計軸系統,不需要再投資建設,可將其作為城軌試驗線列車定位的備用方式。
軌道電路與計軸系統功能和性能等效,沒必要再花費資金在城軌試驗線建設一套軌道電路系統。因此,軌道電路定位方式不適用于城軌試驗線。
1.4 無線網絡定位方式
1.4.1 基本原理
無線網絡定位主要通過無線基站或傳感器與用戶設備之間利用無線電波通信計算出用戶設備位置,通常采用的方法有:基站標識定位法、基站場強定位法、到達時間法(TOA,Time of Arrival)、到達時間差法(TDOA,Time Difference of Arrival)、到達角度法(AOAAngle of Arrival),以及幾種方法的混合方式。其中,TOA、TDOA、AOA是目前相對較為成熟的方法。
(1)基站小區標識定位法
移動臺根據基站覆蓋強度與最強信號基站(或無線節點)通信,從而判斷移動臺在該基站小區范圍內。基站小區標識定位法只能判斷移動臺在某基站小區范圍之內,定位精度取決于小區服務區域大小,通常定位精度很低。
(2)基站場強定位法
已知信道衰落模型及發射信號的功率值,通過測出基站接收信號的功率值,估算出收發信號機之間的距離,從而估計出目標移動臺的位置區域。由于天線的抖動、無線信道的不確定性等因素都會造成信道衰落模型的大小尺度變化,從而使定位不準確。
(3)到達時間法(TOA)
這種方法利用在3座基站(或無線節點)覆蓋范圍內的移動臺與3座基站之間通信的時間信息估計出移動臺位置。如圖6所示,移動臺的二維位置坐標可由3個圓弧的交點確定。計算移動臺位置(X,Y)的TOA方程組如式(1):

其中,(Xi,Yi)表示基站(或無線節點)所在的位置,c表示光速,t表示移動臺發送信號的時間點,ti為移動臺的第一個路徑信號到達基站i(或無線節點)的時間點,i表示基站(或無線節點)的編號。由于無線信道的多變,基站(或無線節點)覆蓋相交處常常為一個區域,而非一點。另外,TOA定位要求移動臺和基站的時間精確同步,這樣就增加了算法的復雜度。所以TOA技術很少被應用到實際中。
(4)到達時間差法(TDOA)
TDOA定位技術是在TOA技術基礎上通過改進算法而不再要求時間同步的技術。TDOA定位中,移動臺對一系列的基站(或無線節點)進行監聽,并測量出每一對信號到達時間的差。然后由3個及以上基站(或無線節點)得到2個或多個獨立的時間差測量值及基站(或無線節點)位置、無線信道信息計算出移動臺位置,如圖7所示。類同TOA公式(1),可得到TDOA的方程組如式(2):
同TOA相比,TDOA利用時間差從而降低了時間同步要求,所以TDOA更具實際應用意義。

圖6 到達時間法
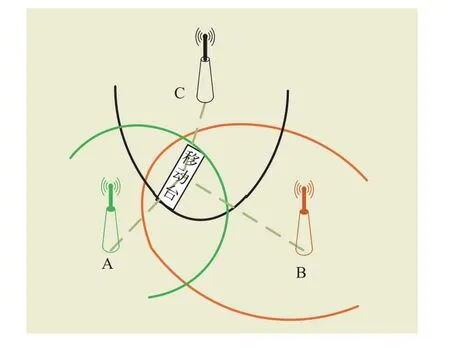
圖7 到達時間差法
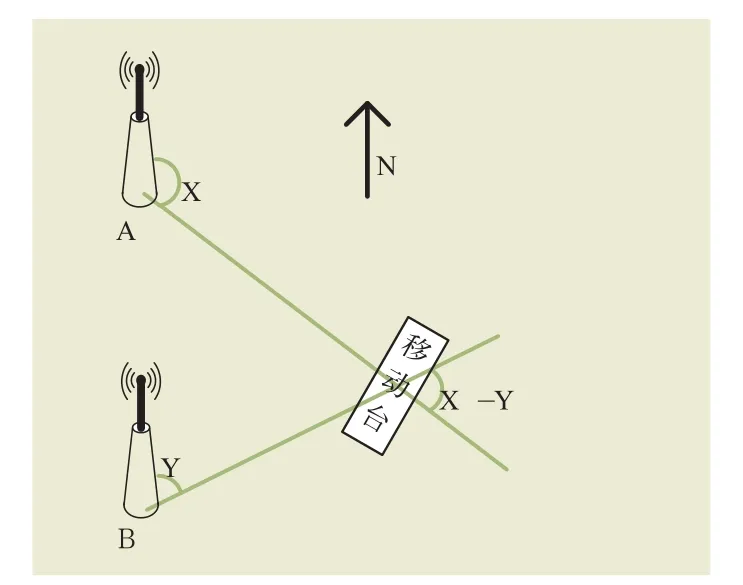
圖8 到達角法

(5)到達角度法(AOA)
利用基站(或無線節點)的陣列天線判斷出基站與移動臺的方向角度,并繪制基站與移動臺的連線,兩座基站與移動臺形成的2條連線的交點即為待定位移動臺的位置,如圖8所示。使用AOA技術時,移動臺的位置沒有二義性,但是此技術需要基站配備有方向性強的檢測天線陣列。
在現實應用中,通常將AOA與TOA、TDOA聯合起來使用,從而達到更高的定位精度的效果。但無線網絡定位對無線信道的穩定性要求較高。
1.4.2 適用性
城軌試驗線既有WLAN和正在建設的LTE-M無線通信系統均沒有定位功能,如果要利用無線網絡定位方式則需對既有系統進行改造或新建具備定位功能的無線通信系統,并配置車載設備。由于試驗線呈閉合環狀線性,隧道內無法實現利用3個及以上基站協同定位;如果全線采用非三角定位法則需沿線大量建設無線基站,且會由于無線覆蓋的不穩定性造成位置信息串擾的現象;如果僅隧道外線路采用三角定位法,則需配置方向性很強的檢測天線和計算能力很強的基站。另外,無線網絡定位對無線信道模型依賴性較強,鑒于城軌試驗線無線環境開放,易受外界電磁干擾而造成無線信道變化多端,從而使定位信息不穩定。為保障定位的準確性及列車行車安全,環狀線性、無線環境開放的城軌試驗線不宜采用無線網絡定位方式實現列車定位。
1.5 衛星系統定位方式
1.5.1 基本原理
衛星定位方式基本原理與無線網絡定位相似,如圖9所示,只是將無線基站設置在太空中,從而使地球上任意一點可利用衛星接收機接收到3顆及以上衛星定位信息的接收機,通過三角公式TOA計算得到接收機在地球上的位置。
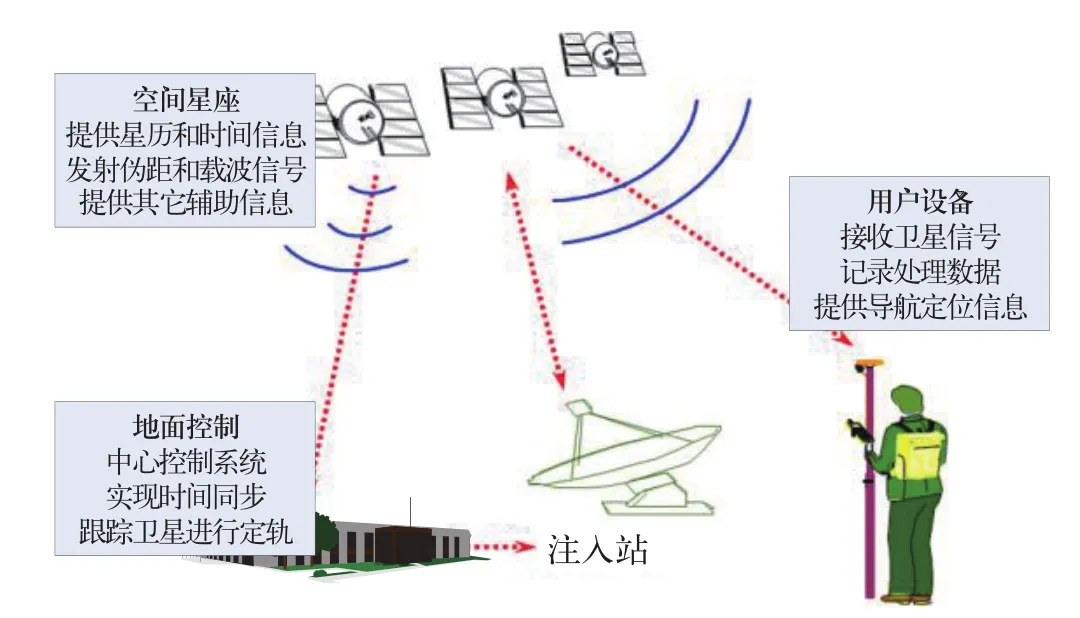
圖9 衛星定位系統結構
1.5.2 適用性
衛星定位同樣易受電磁波和氣候等因素影響而存在定位精確度偏低、定位信息在一定精確度內漂移的現象,且衛星無法直接覆蓋城軌試驗線隧道,滿足不了城軌試驗線全線范圍內列車定位的要求。因此既有衛星定位方式不適用于城軌試驗線列車位置實時監測。
2 城軌試驗線列車位置監測技術方案研究
通過分析可知,上述幾種典型的定位方式均不能滿足城軌試驗線定位需求。鑒于此,本文提出利用分布式光纖振動定位方式和增強衛星定位方式實現城軌試驗線列車位置監測方案,并通過結果分析驗證其適用性,作為城軌試驗線定位的技術依據。
2.1 分布式光纖振動定位方式
2.1.1 基本原理
分布式光纖振動定位系統基于相位敏感光時域反射儀(Φ-OTDR)技術,主要利用的是光纖中的瑞利散射效應。該定位方式利用窄線寬激光器作為光源;激光經過調制器后形成脈沖光并注入到振動傳感光纖中,并在光纖中傳播;當光纖某位置處受到來自車輪產生的振動時,該位置處的光纖長彎度、折射率會發生變化,從而引起此處的后向瑞利散射光信號產生變化;由于光在光纖中發生瑞利散射,其中沿光傳播的反方向傳播的后向瑞利散射光,在脈沖寬度內后向散射光會發生干涉作用;光探測器通過探測該瑞利散射光干涉信號的變化,獲得傳感光纖鏈路上的振動信息,從而獲得列車輪軌的振動情況;探測器通過記錄脈沖光注入光纖的時間,并根據光在光纖中傳播的有效速度和接收到光纖中散射回來的的散射光的時間,準確描繪出擾動曲線;將擾動時刻的曲線與前一時刻的曲線進行作差處理,即可實現對振動位置的準確定位,從而準確監測列車的位置。系統的定位精度由發射的光脈沖寬度和信號的采樣間隔決定,系統原理如圖10所示。
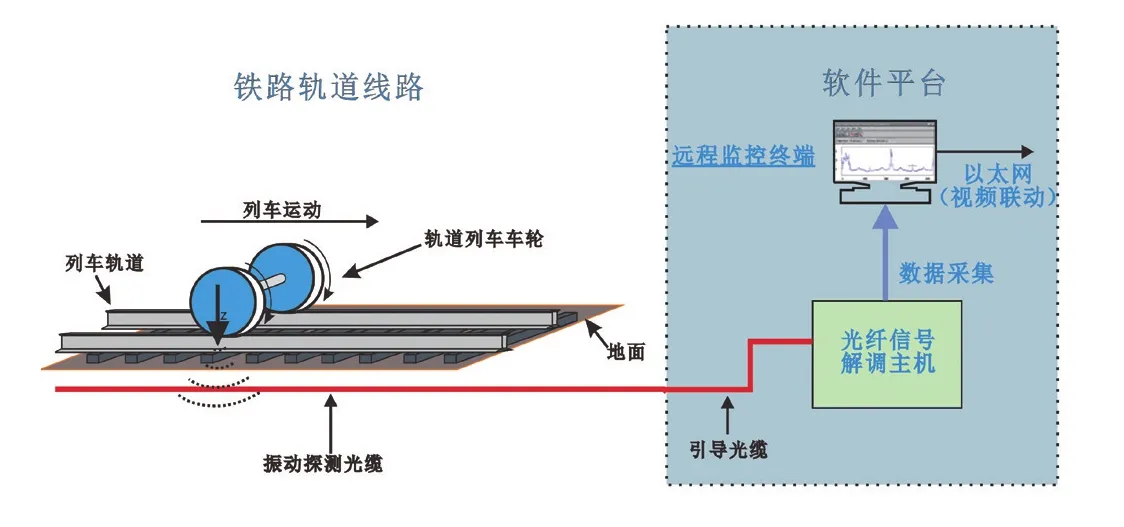
圖10 分布式光纖振動定位檢測系統示意圖
分布式光纖振動定位系統的優勢在于無需在軌道上布設任何傳感裝置和供電,直接利用軌道旁槽道內通信光纜搭建系統即可完成對列車振動信號的在線采集,通過對所采集的振動信號進行實時智能化處理,獲得列車沿軌道運行的位置、方向、速度、車長等綜合信息。
2.1.2 試驗及適用性分析研究
圖11和圖12為某雙線鐵路利用兩軌道中間光纜搭建分布式光纖振動定位系統的試驗結果。圖11為不同長度列車的振動信號的結果比對,圖12為單輛運行軌跡、兩輛列車同向和反向運行軌跡比對。
由圖11和圖12可知,分布式光纖振動定位方式具有可判斷列車長度、定位精度較高、位置與時間信息明確、可準確判斷列車運行方向等優點。但對于相鄰并行線路同時同向運行列車時會存在相互干擾而無法分辨兩列列車的缺陷。
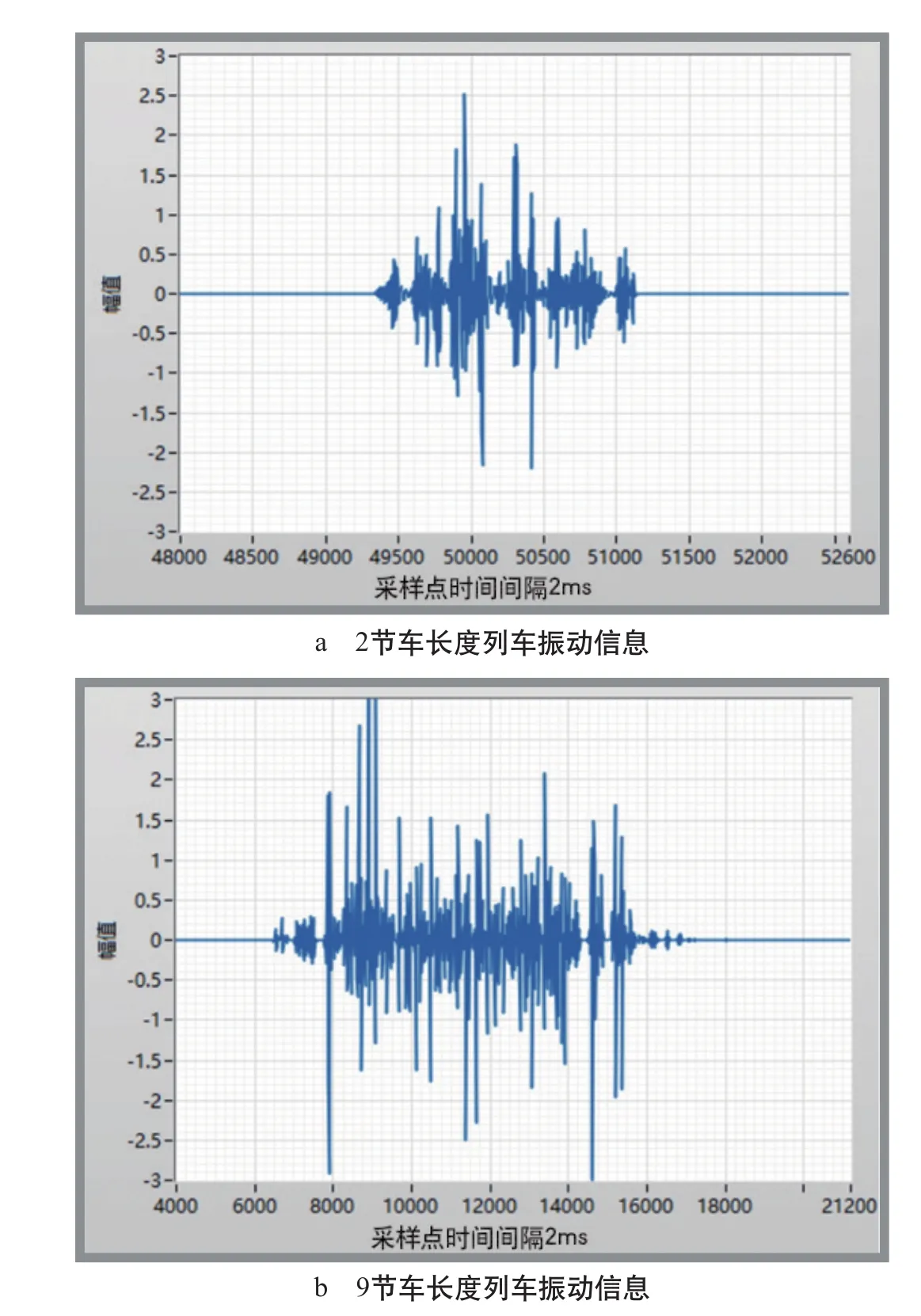
圖11 分布式光纖振動定位系統采集到不同長度的列車振動信息
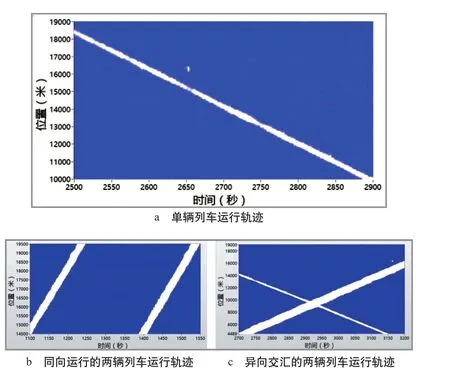
圖12 分布式光纖振動定位系統檢測到軌道上列車運行軌跡
城軌試驗線沿線全部鋪設了光纜,利用城軌試驗線光纜安裝分布式光纖振動定位系統,試驗結果如圖13所示。由圖13可知利用分布式光纖振動定位系統能夠獲得較清晰的列車運行軌跡,即城軌試驗線具備利用分布式光纖振動定位系統監視列車運行的條件。

圖13 城軌試驗線列車位置信號分布圖及列車經過某位置時的時域信號
城軌試驗線除隧道和高架橋外,均與鐵路試驗線存在并行相鄰,最近距離僅5.5 m左右,相鄰試驗線路同時開展試驗時,分布式光纖振動定位系統會存在干擾而不適用。但當鐵路試驗線與城軌試驗線列車相對行駛,且相鄰鐵路試驗線列車同時試驗的數量較少時,分布式光纖振動系統可根據列車行駛方向區分出城軌試驗線列車位置。同時,除相鄰線路干擾外,分布式光纖振動定位方式只能檢測出運行中列車的位置,判斷靜止中的列車的位置需信息系統時時記錄列車位置并根據以往位置信息判斷靜止列車所在位置。
因此,分布式光纖振動定位方式僅不適于城軌試驗線和相鄰鐵路試驗線同時開展列車同向行駛試驗時,以及相鄰鐵路試驗線具有較多列車同時試驗時的城軌試驗線列車位置監測,其它場景下較合適。
2.2 增強衛星定位方式
通過分析衛星基準站技術和衛星全域覆蓋增強技術,驗證在傳統衛星定位方式的基礎上加載上述兩種技術構成的增強衛星定位方式的適用性。
2.2.1 衛星基準站技術
為增強移動裝置衛星定位的準確度,可在地面增設衛星基準站系統。其工作原理是把基準站中一套衛星定位接收機安裝在已確定精確位置的點上;基準臺接收機時接收衛星定位信號,并利用自身已知位置與衛星定位信息對比計算出誤差值,然后將誤差信息時時廣播出去。基準站覆蓋范圍內的移動臺接收到衛星定位信息和基準站的誤差信息后,通過校準,提高定位精確度。環行鐵道已在控制中心處部署一套基準站,如圖14所示,可以覆蓋到除城軌試驗線隧道外的其它鐵路試驗線和城軌試驗線。利用基準站定位精度可精確到水平誤差0.4 m左右,垂直誤差0.5 m左右,如圖15所示。基于基準站的衛星定位精確度高,可以明顯區分相鄰并行試驗線路列車位置。
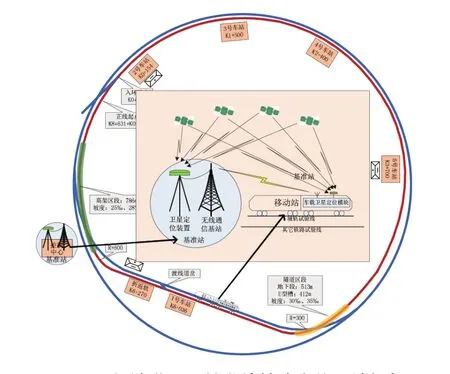
圖14 環行鐵道衛星基準站精確定位系統框架
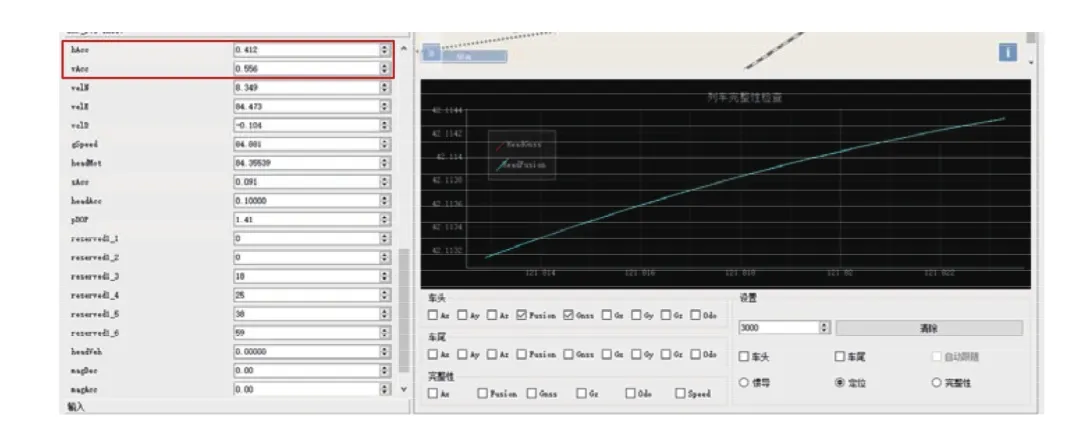
圖15 基于基準站的定位監測
2.2.2 衛星全域覆蓋增強技術
實現隧道內衛星定位,可以利用衛星全域覆蓋增強技術,即在城軌試驗線隧道外建設一套衛星和差分站接收基站、在隧道內增加無線信號覆蓋單元,并利用光纖貫通連接。隧道內的衛星增強系統定位利用衛星信息和無線網絡定位原理實現,系統結構如圖16所示[13-14]。衛星全域覆蓋增強技術已通過京沈客運專線試驗驗證,高速條件下隧道內定位精度約30 m,定位精度可滿足城軌試驗線僅約900 m的隧道內定位要求。
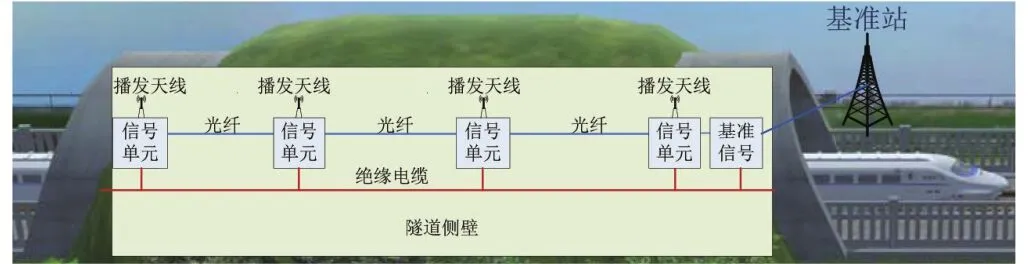
圖16 衛星全域覆蓋增強系統
利用增強衛星定位系統定位還需要考慮車輛具備衛星定位接收裝置。由于目前多數城軌列車都不具備衛星定位接收功能,采用衛星系統定位需在城軌試驗線上試驗的列車上安裝衛星接收裝置。為實現地面對列車位置的監測,需將列車上衛星接收裝置接收到的定位信息通過無線通信系統實時發送到地面。目前城軌列車均配置了WLAN或LTE-M,且城軌試驗線具備WLAN系統并正在建設LTE-M系統,可滿足城軌列車將位置信息通過無線系統時時傳輸到地面系統。
因此,利用增強衛星定位系統實現城軌試驗線列車位置監測具備可行性。
2.3 列車位置監測方案
綜上分析,鑒于當前鐵路試驗線試驗同時試驗的列車較少(同一時間段通常為一輛列車),故此優先推薦城軌試驗線采用分布式光纖振動定位方式,相鄰鐵路試驗線與城軌試驗線采用相對運行模式的列車位置監測方案。試驗列車較多的情況下考慮采用衛星系統定位方式實現列車位置監測的方案。同時考慮既有計軸系統作為其他方式的后備補充。
3 結束語
城軌試驗線實現列車位置監測是拓展試驗能力、保障試驗安全的關鍵技術手段。本文結合既有定位方式特征、性能與城軌試驗線的實際情況,全面對比分析了各種定位技術的優缺點和適用性,并提出了利用光纖振動定位方式和衛星定位方式解決城軌試驗線列車位置監測需求,為城軌試驗線擴能提供了參考方法和技術保障。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40