四輪驅(qū)動汽車轉(zhuǎn)向狀態(tài)下的橫向穩(wěn)定性控制研究
2019-09-19 07:41:14王春燕
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2019年8期
高 琪,王春燕
(南京航空航天大學(xué) 能源與動力學(xué)院, 南京 210016)
隨著消費者對汽車的動力性、安全性與操縱穩(wěn)定性要求越來越高,越來越多的運動型車輛開始采用四輪驅(qū)動技術(shù)。四輪驅(qū)動汽車的4個車輪均能獲得驅(qū)動力,可根據(jù)不同的行駛狀態(tài)分配前后軸與左右輪之間的扭矩,使車輛充分利用地面附著力,從而改善車輛的動力性與操縱穩(wěn)定性[1]。
四輪驅(qū)動汽車由于卓越的動力學(xué)性能引起了各方的重視,國外汽車廠商及學(xué)者們對其開展了研究,而國內(nèi)在此方面的探索還處于初始階段。由于核心技術(shù)需要從國外引進,相對于國外成熟的四驅(qū)技術(shù)還有著較大差距,因此開展對四輪驅(qū)動汽車扭矩分配技術(shù)的研究具有十分重要的意義,同時也能推進我國國防領(lǐng)域?qū)τ谒妮嗱?qū)動技術(shù)的應(yīng)用。
動力學(xué)研究表明[2],車輛的性能會受軸間動力轉(zhuǎn)移與輪間動力轉(zhuǎn)移的影響,軸間動力轉(zhuǎn)移對于車輛動力性的影響較大,輪間動力轉(zhuǎn)移對車輛轉(zhuǎn)向穩(wěn)定性的影響較大。轉(zhuǎn)向工況作為車輛行駛過程中最常見的工況,轉(zhuǎn)向時的穩(wěn)定性控制對于提高車輛的操縱穩(wěn)定性至關(guān)重要,如何通過輪間扭矩分配實現(xiàn)橫擺穩(wěn)定性控制是四輪驅(qū)動技術(shù)的關(guān)鍵問題。
對于四驅(qū)汽車的穩(wěn)定性控制,國內(nèi)外學(xué)者已經(jīng)開展了一定程度的研究。初期對于扭矩分配差速器設(shè)計的相關(guān)研究較多[3-5],隨著技術(shù)的發(fā)展,近年來越來越多的人開始關(guān)注對控制方法的研究[6],如:Wang Q等[7]采用PI反饋控制,通過控制前橋兩側(cè)車輪之間的驅(qū)動力矩實現(xiàn)轉(zhuǎn)向路徑跟蹤,有效提高了車輛的橫向穩(wěn)定性;Song P等[8]采用終端滑模控制,對四輪驅(qū)動車輪進行扭矩分配,將扭矩分配到每個車輪,并在多種工況下驗證了該控制方法的有效性,結(jié)果表明:該方法可有效改善整車操穩(wěn)性。隨著技術(shù)的積累,關(guān)于四驅(qū)汽車穩(wěn)定性控制的研究仍在不斷的向前發(fā)展。
本研究基于轉(zhuǎn)向穩(wěn)定性考慮,討論了四輪驅(qū)動汽車在轉(zhuǎn)向工況下的橫擺穩(wěn)定性控制方法。首先介紹了四輪驅(qū)動汽車穩(wěn)定性控制技術(shù)的研究概況,然后對四輪驅(qū)動汽車進行了動力學(xué)建模,采用分層控制方法分別設(shè)計車輛的上層控制器與下層控制器,對四驅(qū)汽車的輪間扭矩進行分配。最后通過仿真分析對所設(shè)計的控制方法的控制效果進行驗證。
1 動力學(xué)模型及理想狀態(tài)量
1.1 整車動力學(xué)模型
將四輪驅(qū)動汽車動力學(xué)模型簡化成如圖1所示的整車7自由度模型[9],可得到車輛的動力學(xué)平衡方程。

圖1 整車7自由度模型
車輛的縱向運動方程為
Fx4-(Fy1+Fy2)sinδ
(1)
車輛的橫向運動方程為
Fy4+(Fy1+Fy2)cosδ
(2)
車輛的橫擺運動方程為

(3)
式中:m為整車質(zhì)量;vx為縱向車速;vy為橫向車速;δ為前輪轉(zhuǎn)角;Fxi(i=1,2,3,4) 為輪胎縱向力;Fyi(i=1,2,3,4)為輪胎側(cè)偏力;ωr為橫擺角速度;a、b分別為質(zhì)心到前、后軸的距離;d為輪距。
1.2 輪胎模型
輪胎模型采用魔術(shù)公式[10],其一般表達式為:
y(x)=Dsin{Carctan[Bx-E(Bx-arctan(Bx))]}
(4)
式中:y(x)為輪胎側(cè)偏力、回正力矩或制動力;x為輪胎側(cè)偏角或滑移率;B為剛度因子;C為曲線形狀因子;D為峰值因子;E為曲線曲率因子。
1.3 理想狀態(tài)量
根據(jù)整車經(jīng)典2自由度模型[11],可以得到車輛的理想橫擺角速度與理想質(zhì)心側(cè)偏角為:
(5)
(6)
2 控制策略
2.1 整體控制策略
由于汽車是一個比較復(fù)雜的系統(tǒng),本文采用分層控制方法對系統(tǒng)進行控制,以降低控制器的階數(shù),使控制易于實現(xiàn),同時也提高了系統(tǒng)的可靠性。整體控制框圖如圖2所示。
首先根據(jù)駕駛員輸入、傳感器測得的數(shù)據(jù)與汽車狀態(tài)辨識模塊預(yù)估出的汽車狀態(tài),參考汽車2自由度經(jīng)典模型,得到汽車的理想橫擺角速度與理想質(zhì)心側(cè)偏角;再將整體控制過程分為上層控制與下層控制,上層控制器通過對比當前的車輛狀態(tài)與理想的車輛狀態(tài)判斷汽車的轉(zhuǎn)向狀態(tài),計算出當前車輛要獲得理想轉(zhuǎn)向狀態(tài)所需要施加的附加橫擺力矩,下層控制器根據(jù)附加橫擺力矩信息分配各車輪的扭矩,通過輪間扭矩分配改善車輛轉(zhuǎn)向時的操縱穩(wěn)定性。
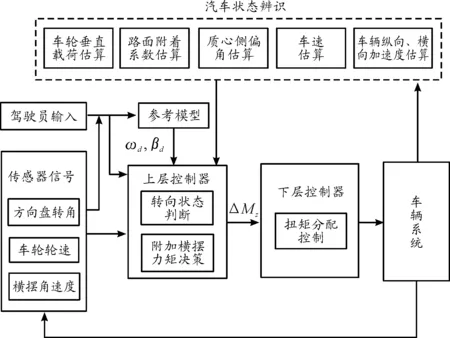
圖2 四輪驅(qū)動汽車轉(zhuǎn)向工況下橫向穩(wěn)定性控制框圖
2.2 穩(wěn)定性控制開啟邏輯


圖3 穩(wěn)定性控制策略開啟邏輯
2.3 上層控制器設(shè)計
2.3.1轉(zhuǎn)向狀態(tài)判斷
為了更好地針對車輛當前的轉(zhuǎn)向狀態(tài)對車輛實施相應(yīng)的控制,需要根據(jù)車輛的狀態(tài)量對目前的行駛狀態(tài)進行判斷,主要是通過當前的橫擺角速度、質(zhì)心側(cè)偏角與理想橫擺角速度、理想質(zhì)心側(cè)偏角進行比較,從而判斷車輛的轉(zhuǎn)向方向與轉(zhuǎn)向狀態(tài),獲得轉(zhuǎn)向狀態(tài)后即可決定附加橫擺力矩的施加方向,其具體判斷邏輯如表1所示。
2.3.2附加橫擺力矩決策
經(jīng)過轉(zhuǎn)向狀態(tài)判斷后,考慮到橫擺角速度與質(zhì)心側(cè)偏角的耦合關(guān)系,本文的上層控制器采用滑模控制算法,同時對橫擺角速度與質(zhì)心側(cè)偏角進行控制。由這兩者與理想值的偏差共同決策附加橫擺力矩,這種控制方法具有響應(yīng)快速、對應(yīng)參數(shù)變化及擾動不靈敏、無需系統(tǒng)在線辨識、物理實現(xiàn)簡單等優(yōu)點。
根據(jù)車輛的橫擺運動方程可得:
d[(Fx2-Fx1)cosδ+(Fy1-Fy2)sinδ]/2Iz+
d(Fx4-Fx3)/2Iz-(Fy3+Fy4)b/Iz+ΔMz/Iz
(7)
忽略車輛縱向車速瞬時時刻變化值,可得質(zhì)心側(cè)偏角導(dǎo)數(shù)為
(8)
選取滑模切換函數(shù)為
s=ωr-ωd+k1(β-βd)
(9)
對切換函數(shù)求導(dǎo),得
(10)
式中k1為一個正的常數(shù),其值越大,滑模控制收斂速度越快。


(11)
選取滑模趨近律為
(12)
式中k2為正常數(shù),表征了滑模控制使系統(tǒng)狀態(tài)向滑模面s=0運動的趨近速度,以及到達滑模面之后向平衡點運動的收斂速度。
為了削弱因符號函數(shù)sgn(s)不連續(xù)性導(dǎo)致的控制系統(tǒng)抖振,采用飽和函數(shù)sat(s/k3)作為替代,公式如下:

(13)
聯(lián)立式(11)(12)得附加橫擺力矩為
ΔMz=-a[(Fx1+Fx2)sinδ+(Fy1+Fy2)cosδ]+
b(Fy3+Fy4)-d(Fx4-Fx3)/2-
d[(Fx2-Fx1)cosδ+(Fy1-Fy2)sinδ]/2-

(14)
2.4 下層控制器設(shè)計
下層控制器采用單側(cè)車輪制動的方式將附加橫擺力矩分配到各個車輪上,增大了附加橫擺力矩的潛力,保證了車輛的軌跡保持能力,提高了車輛的極限行駛性能,其具體制動控制邏輯如表2所示。
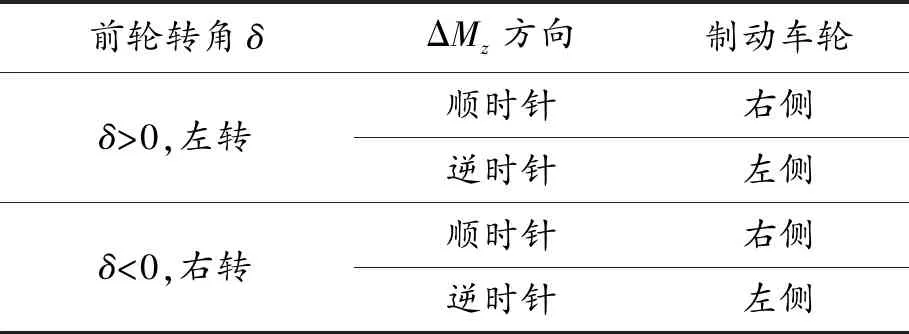
表2 單側(cè)車輪制動控制邏輯
實施控制時制動側(cè)前輪所需的制動力矩為
(15)
制動側(cè)后輪所需的制動力矩為
(16)
制動輪所需的制動力為
(17)
式中:rw為車輪滾動半徑;ωi(i=1,2,3,4)為各車輪轉(zhuǎn)速;Fzi(i=1,2,3,4)為各車輪垂直載荷;f為滾動阻力系數(shù)。
3 聯(lián)合仿真
為了驗證所設(shè)計控制器的控制效果,本文在Matlab/Simulink與Carsim仿真環(huán)境下進行操縱性能仿真驗證,并將分層控制與無控制的仿真結(jié)果進行對比。仿真車型為四輪驅(qū)動B級三廂車,變速器為自動6擋變速器,初始車速為50 km/h,路面材料為5 m gird,路面附著系數(shù)為0.8。Matlab/Simulink采用ode 45求解器,自動變步長求解,仿真時長為8 s。圖4為分層控制時各車輪的制動壓力,從圖4中可以看出:在實施橫擺穩(wěn)定性控制時,采用的是車輛單側(cè)車輪制動。
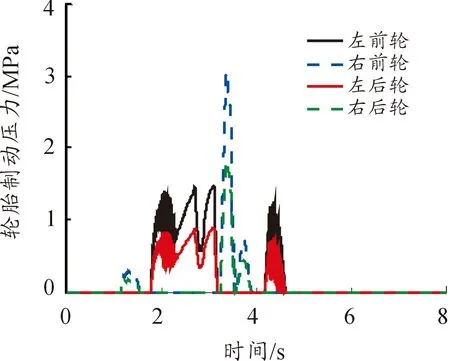
圖4 各車輪制動壓力
仿真結(jié)果如圖5~8所示。圖5為方向盤轉(zhuǎn)角,圖6為橫擺角速度響應(yīng),圖7為質(zhì)心側(cè)偏角響應(yīng),圖8為側(cè)向位移。

圖5 方向盤轉(zhuǎn)角
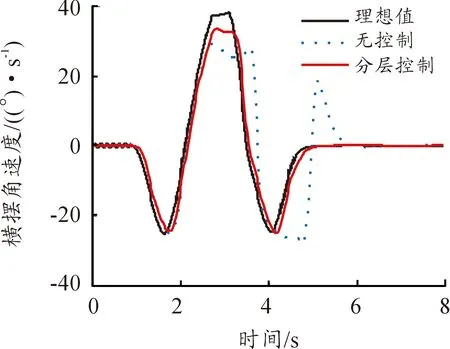
圖6 橫擺角速度響應(yīng)

圖7 質(zhì)心側(cè)偏角響應(yīng)
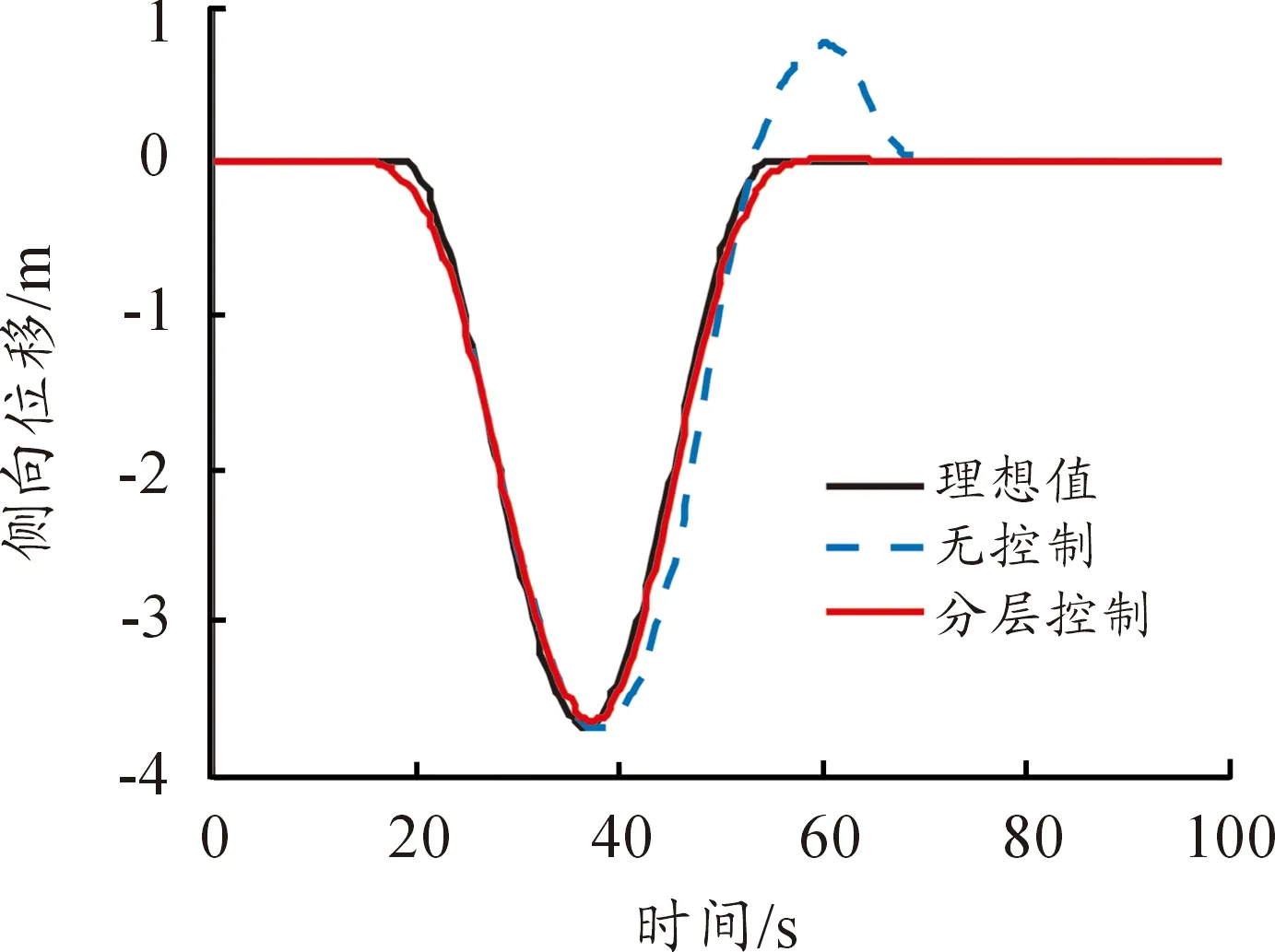
圖8 側(cè)向位移
從圖6~7可以看出:采用分層控制后,車輛對于橫擺角速度、質(zhì)心側(cè)偏角的跟蹤效果更好。由圖8可知:采用了分層控制的車輛基本是沿著目標路徑行駛的,而未經(jīng)控制的車輛會產(chǎn)生一定的路徑偏移。仿真結(jié)果中的響應(yīng)量平均誤差如表3所示。
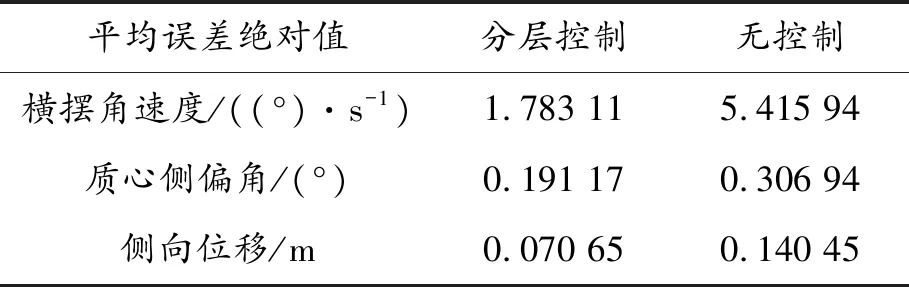
表3 響應(yīng)量平均誤差
由表3可知:采用分層控制的車輛橫擺角速度的平均誤差比無控制的車輛減少了67.08%,質(zhì)心側(cè)偏角平均誤差減小了37.72%,側(cè)向位移平均誤差減小了49.70%,說明分層橫向穩(wěn)定性控制能夠較有效地改善四輪驅(qū)動汽車在轉(zhuǎn)向工況下的操縱穩(wěn)定性,使其在保證動力性的同時提高安全性。
4 結(jié)束語
本文針對四驅(qū)車輛的轉(zhuǎn)向工況,設(shè)計了一種分層控制橫向穩(wěn)定性控制策略。上層控制器首先對轉(zhuǎn)向狀態(tài)進行判斷,并根據(jù)滑模控制理論,以車輛的橫擺角速度與質(zhì)心側(cè)偏角為目標,決策出應(yīng)當施加在車輛上的附加橫擺力矩,下層控制器將附加橫擺力矩分配到各個車輪上。采用Carsim與Matlab/Simulink聯(lián)合仿真對所提出的控制方法進行驗證。結(jié)果表明:分層控制在轉(zhuǎn)向狀態(tài)下能夠有效對四驅(qū)車輛進行橫向穩(wěn)定性控制,改善車輛的狀態(tài)響應(yīng),提高操縱穩(wěn)定性。