Superpave旋轉壓實儀的控制設計及穩壓控制策略研究
2019-09-25 13:22:14羅家浩邵秋萍徐逸飛盧正新孫旭杰
數字技術與應用
2019年6期
羅家浩 邵秋萍 徐逸飛 盧正新 孫旭杰

摘要:論文針對Superpave旋轉壓實儀設備,進行了控制系統的開發與設計。為了更好地實現旋轉壓實儀的穩壓控制,論文主要介紹了模糊控制的方法。通過研究分析,可知模糊控制的響應速度較快并且精度更高。
關鍵詞:旋轉壓實儀;壓力控制;Superpave;模糊控制
中圖分類號:TH112 文獻標識碼:A 文章編號:1007-9416(2019)06-0012-02
0 引言
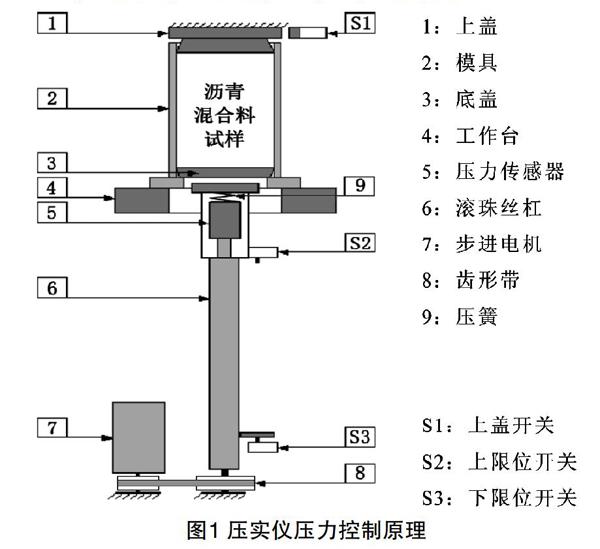
為了能在實驗室中模擬瀝青路面所受作用力的實際情況,通過結合SHRP研究成果,誕生了Superpave旋轉壓實儀(Superpave Gyratory Compactor,SGC),使用這種設備成型出來的試件符合實際工程中的瀝青混合料成型方式。通常情況下,SGC一般由旋擺機構和壓實機構兩部分組成。在壓實的過程中,旋擺機構做勻速運動,較為簡單;壓實機構的速度需要根據實際情況發生變化,是一種非線性的復雜系統。
1 旋轉壓實儀的控制方案
根據旋轉壓實儀的控制要求可知,該設備的控制對象應涵蓋旋擺機構的搓揉運動、壓力信號的采集、壓力機構的升降運動、鍵盤輸入、角度檢測以及顯示部分。根據這些內容,可以將控制系統分為控制中心部分、信息輸入部分、信息輸出部分和信息反饋部分。
控制中心部分是整個控制系統的核心,主要功能是對信息輸入部分的信號進行處理,并將控制信號輸出到信號輸出部分;信息輸入部分主要由壓力輸入和鍵盤輸入兩個獨立部分組成;信息輸出部分主要由顯示部分、驅動信號輸出部分、蜂鳴器部分和提示燈組成;信息反饋部分主要由傳感器組成。……
登錄APP查看全文
