基于Pro/E的汽車差速器裝配與機構仿真
2019-09-25 13:22:14林新英林宗德劉偉
數字技術與應用 2019年6期
林新英 林宗德 劉偉

摘要:介紹了差速器的結構組成和工作原理,按照裝配關系將各元件連接組裝并建立連接,借助Pro/E的機構仿真建立差速器運動分析和動力分析,獲取分析結果,驗證了差速器的工作原理和運動規律。
關鍵詞:Pro/E;差速器;機構仿真分析
中圖分類號:TH391.9 文獻標識碼:A 文章編號:1007-9416(2019)06-0093-02
0 引言
汽車差速器能夠使左、右(或前、后)驅動輪實現以不同轉速轉動的機構。主要由左右半軸齒輪、兩個行星齒輪及齒輪架組成。功用是當汽車轉彎行駛或在不平路面上行駛時,使左右車輪以不同轉速滾動,即保證兩側驅動車輪作純滾動運動。差速器是為了調整左右輪的轉速差而裝置的。在四輪驅動時,為了驅動四個車輪,必須將所有的車輪連接起來,如果將四個車輪機械連接在一起,汽車在曲線行駛的時候就不能以相同的速度旋轉,為了能讓汽車曲線行駛旋轉速度基本一致性,這時需要加入中間差速器用以調整前后輪的轉速差。
1 汽車差速器的工作原理
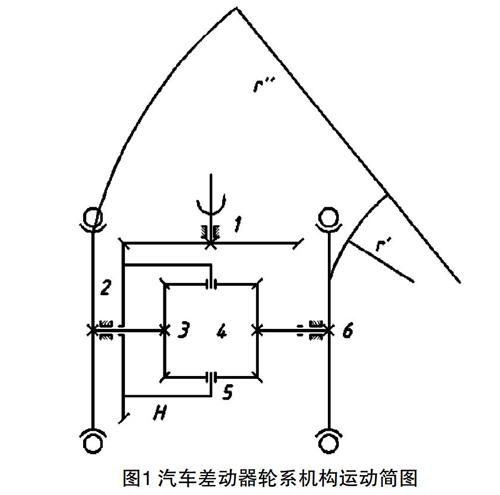
汽車差速器是空間周轉輪系機構,如圖1所示為汽車差動輪系的實體圖和機構運動簡圖。其中系桿H固連在齒輪2上。發動機通過傳動軸驅動齒輪1轉動。當汽車在平坦的路上直線行駛時,左右兩輪滾過的距離相等,轉速相同,齒輪2、3、4、5不產生相對運動。當汽車右拐時,右轉彎半徑比左轉彎半徑小,為使車輪與地面不發生滑動,就要求左輪比右輪快些。因此輪3和輪4之間便發生相對轉動,由齒輪2(即行星輪系桿)、3、4、5組成的差動輪系發生作用,行星輪不僅繞3、4輪的公共軸線做公轉還要自轉,使左右輪產生差速,速度關系為2nH=n3+n4。
2 差速器的虛擬裝配
裝配時,會彈出“元件放置”窗口,此窗口有3個頁面:“放置”、“移動”、“連接”。其中一種裝配元件方法是在“放置”頁面給元件加入各種固定約束,將元件的自由度減少到0,因元件的位置被完全固定,這樣裝配的元件不能用于運動分析;另一種裝配元件的方法是在“連接”頁面給元件加入各種組合約束,如銷釘、圓柱、剛體、球、6DOF等,因自由度沒有完全消除(剛體、焊接、常規除外),這些組合約束裝配的元件可以自由移動或旋轉,這樣裝配的元件可用于運動分析[3]。
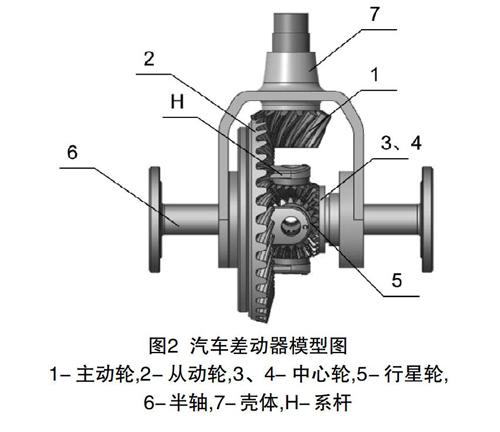
通過新建組件文件后,逐步添加各元件并按照對應的連接類型進行組裝,主要元件的連接關系如表1所示,裝配后的差速器模型如圖2所示。
3 差速器的齒輪連接
分別對四個行星輪和右半軸組件和左半軸組件進行齒輪連接,傳動比為1.44,并建立主動輪元件和從動輪元件的齒輪連接,傳動比為2.42。
4 機構的運動仿真
4.1 運動分析
運動分析用于模擬汽車在平坦路面直行的情況。進入機構工作界面,首先進行伺服電機的設置,電動機的運動軸選擇主動輪的銷釘連接符號并設置電機的速度為30deg/sec,進行運行可知差速器中的各個齒輪不發生相對運動,等效于一個整體,左右輪速度相等。
4.2 動力分析
動力分析用于模擬汽車行駛時差速器的工作情況。汽車在0-20s時間內直行,20-50s內右轉,50-80s內左轉,80-100s內直行。通過仿真觀察差速器的運轉和左右半軸的轉速變化。
4.2.1 定義質量屬性和重力
指定整個組件的質量密度為7.8e-9tonne/mm3,設置重力加速度的模為9806mm/s2。
4.2.2 定義阻尼
分別對系桿和殼體、主動輪和殼體、左半軸與殼體、右半軸與殼體的運動軸(銷釘連接)進行旋轉阻尼設置,值為6mm2/(deg sec)。
4.2.3 伺服電機的定義
結合差速器的運動分別定義3個伺服電機的速度變化,具體速度定義如表2所示。
對差速器進行動態分析并運行并測量主要元件的轉速,其測量結果如圖3所示。
由圖3可知在20-50s汽車右轉,50-80s汽車左轉,左右中心輪和系桿三者的速度不同。因為行星輪不僅自轉,還要繞中心輪公轉,差速器工作,左右輪產生差速,但是轉速始終保持的關系為兩中心輪的轉速之和是系桿轉速的2倍。
5 結語
通過Pro/E 的模擬裝配和機構仿真,通過運動分析和動力觀察差速器的運動輸出,能夠更加直觀地了解并掌握其運動的規律,可簡化機構的設計開發過程。
參考文獻
[1] 夏元白.機械運動仿真與動力分析[M].北京:電子工業出版社,2015:6.
[2] 王凱,曹西京.基于Pro/E的機械產品機構運動的仿真設計[J].輕工機械,2006(1):62-64.
[3] 榮治明.基于Pro/E的機構虛擬裝配與仿真[J].科技與企業,2013(4):268.
[4] 周培顯.基于PROE曲柄滑塊機構的運動仿真及分析[J].新技術新工藝,2012(2):26-28.
Automobile Differential Assembly and Mechanism Simulation based on Pro/E
LIN Xin-ying,LIN Zong-de,LIU Wei
(Minnan University of Science and Technology,Industrial Robot Measurement and Control and Mold Manufacturing of Key Laboratories in Fujian Province, Shishi? Fujian? 362700)
Abstract:This paper introduces the structure and working principle of the differential. According to the assembly relationship, the components are connected and assembled and connected. The motion analysis and dynamic analysis of the differential are established by means of Pro/E mechanism simulation. The analysis results are obtained and verified. The working principle and motion law of the differential.
Key words:Pro/E;differential;mechanism simulation analysis
