基于速度擾動觀測和模糊PID的視軸穩(wěn)定控制
2019-10-09 00:45:18侯宏錄
自動化儀表 2019年9期
關(guān)鍵詞:系統(tǒng)
侯宏錄,唐 瑞,王 秀
(西安工業(yè)大學(xué)光電工程學(xué)院,陜西 西安 710021)
0 引言
對于動基座下的載體運動干擾、摩擦力矩干擾和質(zhì)量不平衡的干擾,一般采用現(xiàn)代控制方法解決視軸的擾動[1-2]問題。目前,已經(jīng)有多種現(xiàn)代控制理論應(yīng)用于與視軸穩(wěn)定控制器,例如自適應(yīng)比例-積分-微分(proportion-integra-differential,PID)控制器、自適應(yīng)滑模控制器、神經(jīng)網(wǎng)絡(luò)自適應(yīng)控制器[3-5]。眾多研究人員對經(jīng)典控制理論進(jìn)行了大量研究,在設(shè)定PID參數(shù)的過程中,發(fā)現(xiàn)PID參數(shù)調(diào)節(jié)的不確定性。由于外界擾動,系統(tǒng)輸入的值在范圍內(nèi)變化,此時原本設(shè)定的PID參數(shù)不一定是最優(yōu)值。模糊控制算法將輸入模糊化,通過設(shè)定調(diào)整規(guī)則,得出模糊輸出,最終解模糊得到結(jié)果。模糊PID則是將輸入值與PID參數(shù)聯(lián)系起來,實時在線調(diào)整參數(shù),有較好的控制性能[6-8]。為了獲得高穩(wěn)定精度、快速響應(yīng)的視軸穩(wěn)定系統(tǒng),將模糊PID控制器和基于速度信號擾動觀測器(velocity based disturbance obsever,VDOB)相結(jié)合。考慮到無人機飛行過程中視軸穩(wěn)定平臺可能受到不同程度的力矩和速度擾動,為了減少擾動對控制精度的影響,采用VDOB來觀測擾動,并對其進(jìn)行一定補償,使視軸穩(wěn)定精度也得到了相應(yīng)提高。通過仿真試驗,驗證了該方法的有效性。
1 視軸穩(wěn)定原理與系統(tǒng)結(jié)構(gòu)
無人機光電跟蹤平臺穩(wěn)定控制系統(tǒng)組成部分主要包括平臺基座和一組由多個框架組成的轉(zhuǎn)動平臺。基座與載機固連,平臺以吊掛的方式安裝在載體之外,伺服控制系統(tǒng)安裝在小型電子控制器機箱內(nèi)。
根據(jù)對無人機光電穩(wěn)定平臺的分析,選取了兩軸兩框架作為穩(wěn)定平臺的基本機構(gòu)。兩軸兩框架基本結(jié)構(gòu)如圖1所示。
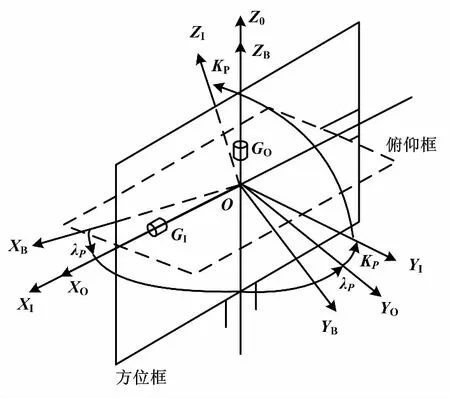
圖1 兩軸兩框架基本結(jié)構(gòu)圖
假設(shè)三個坐標(biāo)系共原點,旋轉(zhuǎn)中心位于坐標(biāo)系原點,無人機載光電穩(wěn)定平臺各坐標(biāo)系之間的關(guān)系如下。
①穩(wěn)定平臺基座坐標(biāo)系(B):與基座固聯(lián),坐標(biāo)系與機體坐標(biāo)系重合。
②方位環(huán)坐標(biāo)系(O):與方位環(huán)固聯(lián),Z軸與B坐標(biāo)系Z軸重合,方位環(huán)繞X軸旋轉(zhuǎn)得到方位角λP。因此當(dāng)方位角λP=0時,O系與B系重合。
③俯仰環(huán)坐標(biāo)系(I):與俯仰固聯(lián),X軸與O坐標(biāo)系X軸重合,內(nèi)俯仰繞Z軸旋轉(zhuǎn)得到高低角Kp。當(dāng)高低角Kp=0時,I系與O系重合。
如果不考慮兩軸的耦合作用,則兩軸轉(zhuǎn)臺的動力學(xué)模型為:

(1)
由式(1)即得出電機力矩擾動力矩和角速度、角加速度的關(guān)系。在穩(wěn)定平臺上,可通過控制電機的轉(zhuǎn)速來控制平臺的角速度,從而實現(xiàn)視軸穩(wěn)定。
2 視軸穩(wěn)定控制原理
輸入指令和輸出差值由穩(wěn)定控制器的輸出控制信號送入功率驅(qū)動裝置,對信號進(jìn)行放大和調(diào)制,并通過控制電機的轉(zhuǎn)速穩(wěn)定視軸。視軸穩(wěn)定回路原理如圖2所示。
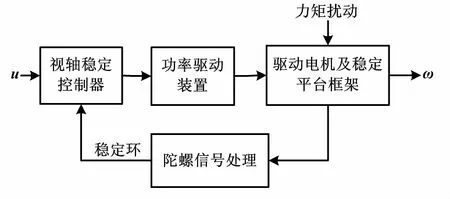
圖2 視軸穩(wěn)定回路原理圖
外界的力矩擾動影響著視軸的穩(wěn)定,平臺框架的陀螺儀將測得的角速率信號送入視軸穩(wěn)定控制器,位置回路輸出的信號和被陀螺敏感到的信號差值作為穩(wěn)定環(huán)的輸入值,通過電機控制穩(wěn)定平臺。在穩(wěn)定平臺機械結(jié)構(gòu)中的減振裝置用來隔離外界的高頻振動擾動,低頻擾動通過伺服控制進(jìn)行隔離。為了進(jìn)一步隔離擾動,在視軸穩(wěn)定回路中引入擾動觀測器,而在控制算法中進(jìn)行擾動補償,改善系統(tǒng)控制性能,提高穩(wěn)定精度。
3 電機與平臺建模
系統(tǒng)中采用的電機為直流力矩電機。直流力矩電機與平臺負(fù)載等效電路如圖 3 所示。
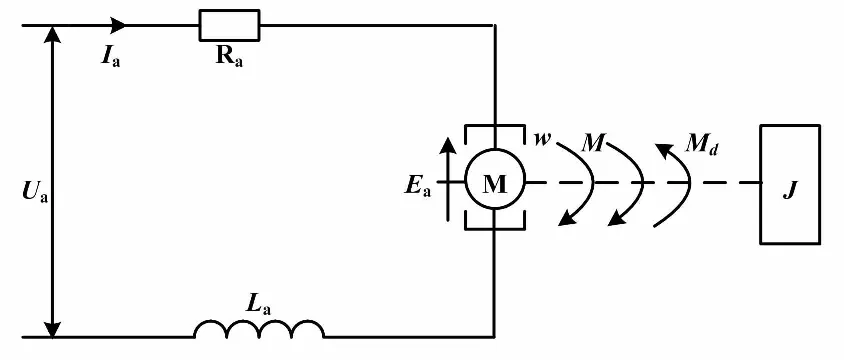
圖3 直流力矩電機與平臺負(fù)載等效電路圖
電機選用無刷直流力矩電機。系統(tǒng)采用電壓調(diào)速,由此可以得到系統(tǒng)的電壓平衡和力矩平衡方程為:
(2)
式中:R為電機繞組電阻;L為電機繞組電感;u'為調(diào)制電壓輸入;I為流過電機繞組的電流;E為電機繞組反動勢;J為負(fù)載轉(zhuǎn)動慣量;M為電機輸出力矩;ω為電機轉(zhuǎn)速;Tf(ω)為摩擦力矩,它是轉(zhuǎn)速的非線性函數(shù);b為機械阻尼;Ce和Cm分別為電機的反電勢常數(shù)和力矩常數(shù)。
對式(2)作拉式變換,可以得到式(3)。
(3)
假設(shè)擾動力矩為零,由式(3)可以計算出電機的傳遞函數(shù)。
(4)
式中:u'(s) 、M(s)分別為調(diào)制電壓輸入和力矩輸出。
本系統(tǒng)設(shè)計中,平臺總體質(zhì)量m≤1 kg,旋轉(zhuǎn)半徑r≤50 mm,J=0.002 5(kg·m2)。本系統(tǒng)采用J36LWX002型無刷直流力矩電動機,已知電機參數(shù)如下:Ce=0.06(v·s/rad),Cm≥0.06(N·m/s),轉(zhuǎn)子轉(zhuǎn)動慣量J=6×10-5(kg·m2),R=17±1.7(Ω),L=4.5±0.5(mH)。由此,可以得到傳遞函數(shù):
(5)
電機輸入信號是位置回路輸出的角速率,輸出為框架實際角度。
伺服驅(qū)動器采用脈寬調(diào)制(pulse width modulation,PWM)技術(shù),系統(tǒng)中伺服驅(qū)動控制器的功率放大器截止頻率遠(yuǎn)大于電機的截止頻率,所以其傳遞函數(shù)可以簡化為一個比例環(huán)節(jié)。即:
GPWM(s)=KPWM=1.5
由電機的傳遞函數(shù)和功率放大電路傳遞函數(shù),可以得到受控對象的傳遞函數(shù)為:
(6)
4 基于模糊PID和擾動觀測器的復(fù)合控制器設(shè)計
在本文中,視軸穩(wěn)定控制采用VDOB和模糊PID控制器。
4.1 模糊PID控制器
傳統(tǒng)參數(shù)固定的PID控制器無法滿足高精度控制要求,模糊控制不依賴與對象模型,可利用被控對象的動態(tài)輸入和輸出關(guān)系,建立規(guī)則,進(jìn)行合理推理獲得輸出控制量。模糊PID控制器具有控制精度高、實時性強、魯棒性好等優(yōu)點,彌補了PID在高精度控制系統(tǒng)中的缺陷。
4.1.1 PID參數(shù)的整定
PID控制器廣泛應(yīng)用于現(xiàn)代工業(yè)控制領(lǐng)域, PID控制可以表示如下:
式中:KP為比例參數(shù);Ki為積分參數(shù);Kd為微分參數(shù);u(t)為 PID 控制器的輸出;e(t)為控制誤差。
由于視軸穩(wěn)定回路搭載在無人機上,大部分無人機的擾動主頻在13 Hz,所以穩(wěn)定回路的帶寬選擇在20 Hz以上。PID參數(shù)經(jīng)過整定,最終得出KP=400、Ki=9、Kd=0.003。
4.1.2 模糊推理
模糊PID控制器設(shè)計的重點是模糊推理的確定,即確定誤差e和誤差變化率ec與PID的參數(shù)KP、KI、KD的模糊關(guān)系。模糊PID控制原理如圖4所示。
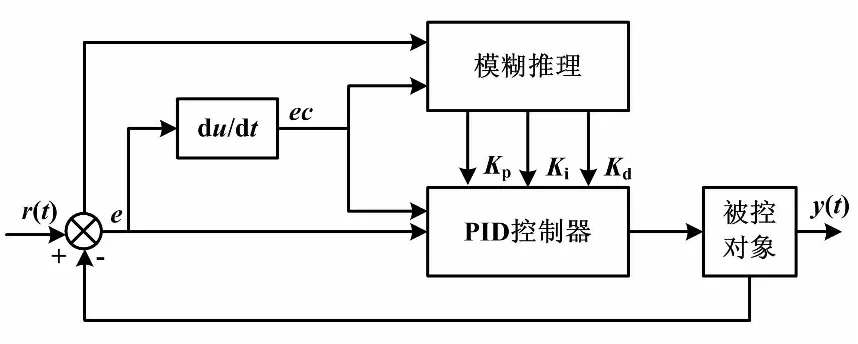
圖4 模糊PID控制原理圖
將系統(tǒng)誤差e和誤差變化率ec變化范圍定義為模糊集上的論域,e,ec={-3,-2,-1,0,1,2,3},其模糊子集為e,ec={NB,NM,NS,ZO,PS,PM,PB},子集中元素分別代表負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。設(shè)e,ec和Kp、Ki、Kd均服從正態(tài)分布,因此NB 與 PB 的隸屬函數(shù)選擇 Sig-moid 型,其他均采用三角形隸屬度函數(shù)。
在確定PID參數(shù)的模糊控制規(guī)則時,需要考慮PID參數(shù)對控制性能的影響,并反復(fù)檢驗,以期得到最佳的控制效果。
4.1.3 解模糊
建立模糊規(guī)則之后,系統(tǒng)的輸出得到模糊化的結(jié)果,解模糊得到精確的輸出值。本文采用重心法。重心法取隸屬度函數(shù)曲線與橫坐標(biāo)圍成面積的重心作為模糊推理的最終輸出值,如式(7)所示。
(7)
將解模糊的結(jié)果與初始的PID參數(shù)值代入式(8)計算。
(8)
式中:Kp、Ki、Kd為通過模糊控制后的實時PID參數(shù)。
將模糊控制與PID結(jié)合實現(xiàn)了PID參數(shù)的在線整定,使PID滿足了實時控制需求。
4.2 基于速度的擾動觀測器設(shè)計
考慮到負(fù)載的變化對系統(tǒng)控制特性的影響,為了增加系統(tǒng)的魯棒性和快速穩(wěn)定性,通常需要設(shè)計一個外界擾動觀測器實現(xiàn)補償控制[9]。在設(shè)計中,從系統(tǒng)可測信息中估計出不可測的擾動而構(gòu)造一個擾動觀測器[10],可以增強對系統(tǒng)偏差的調(diào)節(jié),提升系統(tǒng)的抗干擾能力。經(jīng)典擾動觀測器的微分環(huán)節(jié)存在噪聲放大等問題,限制了伺服性能[11-12]。
VDOB及光電穩(wěn)定平臺控制系統(tǒng)原理如圖5所示。
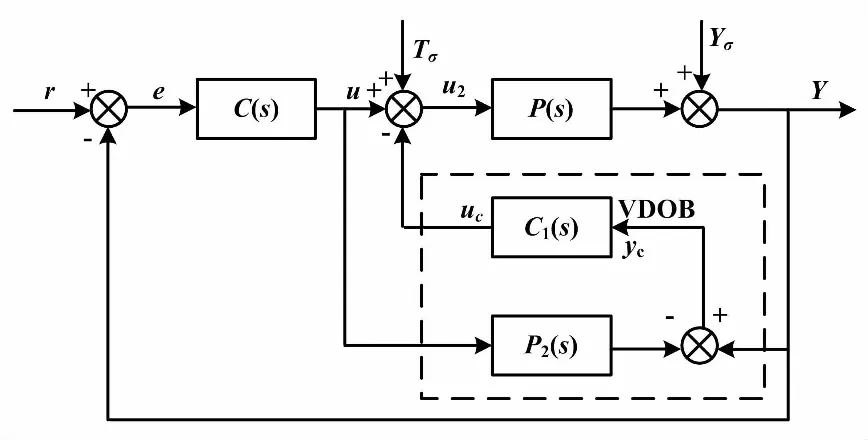
圖5 VDOB及光電穩(wěn)定平臺控制系統(tǒng)原理框圖
圖5中:P(s)為平臺真實模型;P1(s)為平臺標(biāo)稱模型;C(s)為控制器;C1(s)為補償器;r為速度參考信號;y為平臺速度輸出;Td為平臺力矩擾動,包括摩擦力矩、線撓力矩、不平衡力矩等;yd為平臺載體速度擾動;u為C(s)輸出控制量;uc為擾動估計量;ut為平臺的實際驅(qū)動力矩。
從圖5可知,當(dāng)標(biāo)稱模型正確時,VDOB的數(shù)學(xué)表達(dá)式為:

(9)
同樣,未引入VDOB的系統(tǒng)數(shù)學(xué)表達(dá)式為:
(10)
比較式(9)、式(10),可以得出如下結(jié)論。
①當(dāng)標(biāo)稱模型P1(s)與真實模型P(s)完全相同, VDOB與系統(tǒng)的速度輸出和系統(tǒng)參考輸入無關(guān)。這說明控制器C(s)和VDOB的設(shè)計是完全獨立的。

5 仿真試驗
根據(jù)受控對象,選取速率誤差e的論域為[-0.1,+0.1],ec的論域為[-1,+1]、量化因子為10,Kp的論域設(shè)定[0,20]、量化因子為30,Ki為[0,20]、量化因子為2,Kd為[0,3]、量化因子為0.001,采用試湊法的PID參數(shù)Kp、Ki、Kd為分別為400、9、0.003。
復(fù)合控制仿真如圖6所示。
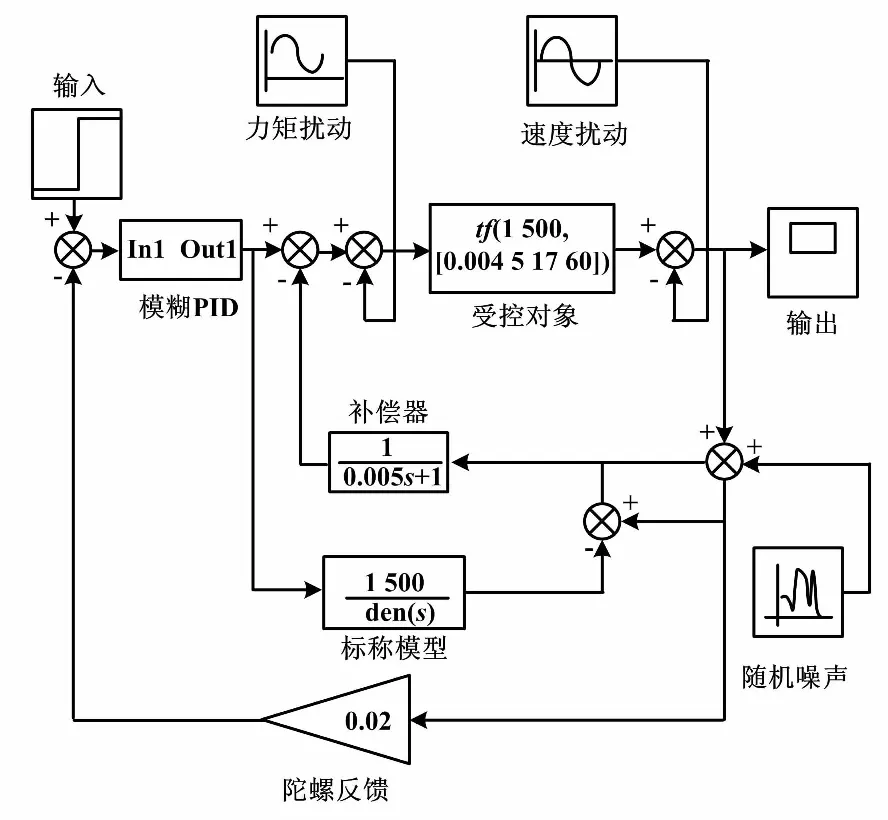
圖6 復(fù)合控制仿真圖
5.1 外界無擾動時的系統(tǒng)仿真試驗
當(dāng)輸入幅值1的階躍信號,外界無擾動的階躍響應(yīng)對比如圖7所示。
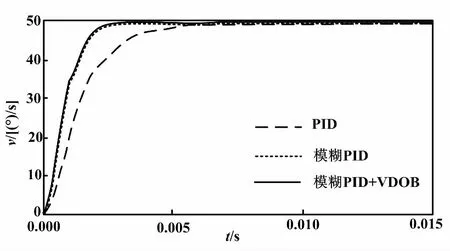
圖7 階躍響應(yīng)對比圖
根據(jù)圖7可知,模糊PID和VDOB與模糊PID的復(fù)合控制的階躍響應(yīng)曲線重合。因此,正如理論分析的結(jié)果,VDOB不改變系統(tǒng)的輸入輸出之間的傳遞關(guān)系。由圖8得PID上升時間為0.002 8 s,超調(diào)量為0,模糊PID上升時間為0.001 6 s,超調(diào)量為0.09%。模糊PID和VDOB復(fù)合控制與模糊PID的上升時間和超調(diào)量相同。模糊PID雖然超調(diào)量增加到0.09%,但是上升時間減少了42.9%,提高了系統(tǒng)的動態(tài)性能。
5.2 外界擾動為速度擾動時的系統(tǒng)仿真試驗
當(dāng)擾動為yd=3sin(2πt)的速度擾動,也就是1 Hz的速度擾動信號。當(dāng)速度測量噪聲為峰峰值為0.03(°)/s的隨機噪聲時,速度階躍響應(yīng)對比如圖8所示。
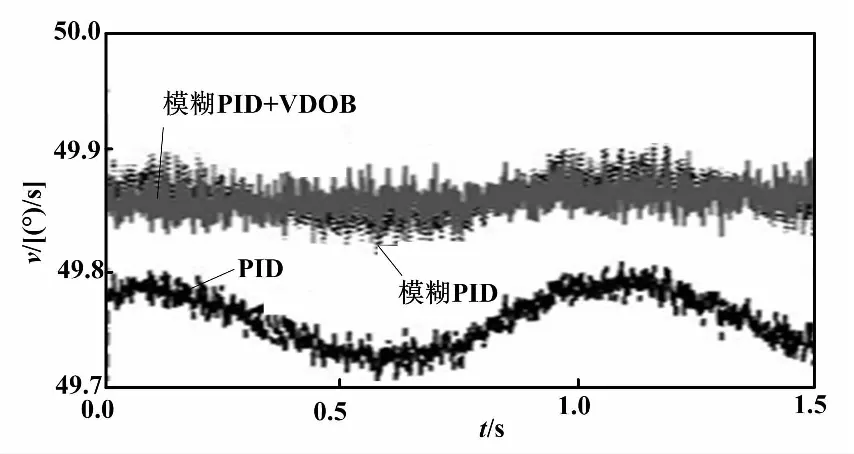
圖8 速度擾動階躍響應(yīng)對比圖
由圖8可知,在1 Hz的速度擾動信號下,模糊PID的擾動抑制能力比PID更強。當(dāng)系統(tǒng)加入VDOB之后,載體速度擾動對平臺速度的干擾幾乎被完全抑制,曲線主要顯示的是速度測量噪聲。速度擾動隔離度對比如表1所示。
由表1可知,在1 Hz的速度擾動下,VDOB的加入明顯提高了系統(tǒng)的抑制干擾能力,在10 Hz的速度擾動下,VDOB的加入對干擾抑制能力也有一定改善。
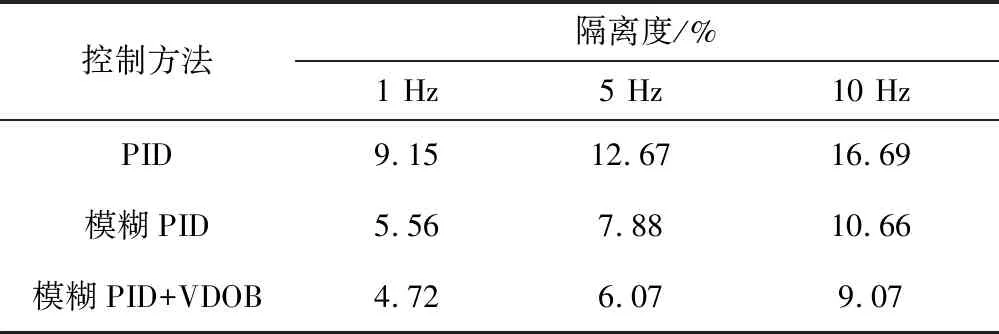
表1 速度擾動隔離度對比表
當(dāng)擾動為Td=0.3+sin (2πt)Nm、峰峰值為0.03(°)/s的速度測量隨機噪聲時,系統(tǒng)的力矩擾動階躍響應(yīng)對比如圖9所示。
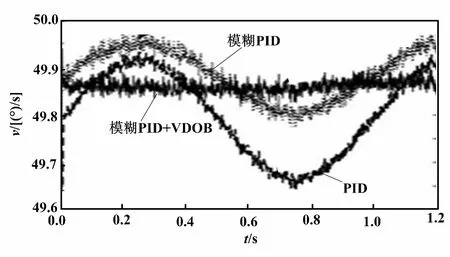
圖9 力矩擾動階躍響應(yīng)對比圖
通過對比圖9,當(dāng)頻率為1 Hz、5 Hz、10 Hz的力矩擾動下,系統(tǒng)的隔離度對比如表2所示。
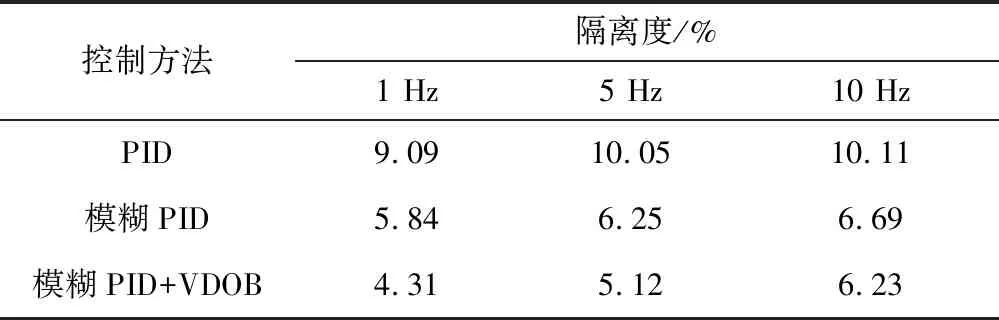
表2 力矩擾動隔離度對比表
表2表明:當(dāng)擾動為力矩擾動時,擾動為1 Hz、5 Hz時VDOB對系統(tǒng)的隔離效果有較為的改善, 10 Hz的隔離效果也有一定改善。
6 結(jié)束語
為了改善光電跟蹤系統(tǒng)視軸穩(wěn)定平臺的低頻擾動抑制能力,本文將經(jīng)典的PID的控制器與模糊控制理論相結(jié)合,通過模糊控制理論在線整定PID參數(shù),彌補了PID控制在高精度控制系統(tǒng)中的缺陷。為了提高系統(tǒng)的控制精度和穩(wěn)定精度,將模糊PID作為視軸穩(wěn)定控制器,結(jié)合PID良好的靜態(tài)性能和模糊控制的動態(tài)性能。為了進(jìn)一步抑制穩(wěn)定平臺可能會受到的力矩擾動,速度擾動,將基于速度信號的擾動觀測器與模糊PID控制器相結(jié)合,理論分析和數(shù)字仿真均證明此方法的有效性。其中,在MATLAB的Simulik工具箱中進(jìn)行的仿真試驗表明,在1 Hz的力矩擾動下,加入VDOB的穩(wěn)定回路的隔離度為4.31 %,明顯小于未加入VDOB回路的5.84%;在1 Hz的速度擾動下,加入VDOB的穩(wěn)定回路的隔離度為5.56%,小于未加入VDOB回路的4.72%。在10 Hz的速度和力矩擾動下,加入VDOB系統(tǒng)對擾動的隔離能力并無明顯提升。通過分析表1、表2可以得出,模糊控制器對高頻低頻信號都有著較好的抑制能力,與VDOB相結(jié)合后的復(fù)合控制則進(jìn)一步加強了系統(tǒng)對低頻信號的抑制能力,提高了視軸穩(wěn)定回路的控制性能以及擾動抑制能力。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
