基于B樣條算法的樹干表面形貌三維重建研究
2019-10-09 02:58:54裴魏魏倪海明戚大偉
森林工程 2019年5期
裴魏魏 倪海明 戚大偉


摘 要:建立名樹古木三維數(shù)字化檔案,對監(jiān)測和研究名樹古木的健康狀況、有效保護珍貴名樹古木具有重要意義。為了實現(xiàn)對樹干表面形貌的精確三維重建,本文采用三臺Gocator2080型號三維智能激光掃描儀對稱安裝的方式,設計一種能夠實現(xiàn)對樹干表面形貌進行360°全方位三維激光掃描的樹干表面形貌三維激光掃描裝置。采用七參數(shù)法對三臺坐標相互獨立的Gocator2080三維智能激光掃描儀的坐標系進行機械標定。使用標定后的三維激光掃描裝置采集樹干表面形貌三維點云數(shù)據(jù)。利用經(jīng)節(jié)點插值改進后的三次B樣條算法實現(xiàn)對樹干表面形貌的三維重建,獲得較為精確的三維重建圖像。與插值前的樹干表面形貌三維重建圖像相比,經(jīng)插值后的樹干表面形貌三維重建圖像能夠更準確地反映出樹干表面的節(jié)子和紋理等表面形貌特征。本研究為進一步研究和建立名樹古木三維數(shù)字化檔案,提供了有效的技術基礎。
關鍵詞:三維激光掃描儀技術;七參數(shù)法;B樣條算法
中圖分類號:S758 ? ?文獻標識碼:A ? 文章編號:1006-8023(2019)05-0057-06
Abstract:It is of great significance to establish a three-dimensional digital archive of famous ancient trees, to monitor and study the health status of famous ancient trees, and to effectively protect the precious ancient trees. In order to realize the accurate three-dimensional reconstruction of the tree trunk surface topography, this paper adopts three Gocator 2080 model intelligent 3D laser scanner symmetrically installment method, designs a tree trunk surface morphology 3D laser scanning device, which can realize the 360° omni-directional 3D laser scanning of the tree trunk surface morphology. The coordinate system of three Gocator 2080 3D intelligent laser scanners with independent coordinates is calibrated by the method of seven-parameter. Collecting the 3D point cloud data of the tree trunk surface shape by using the calibrated 3D laser scanning device, and the improved cubic b-spline algorithm is used to reconstruct the tree trunk surface morphology after the node insertion processing, and a more accurate 3D reconstruction image is obtained. Compared with the 3D reconstruction image of the tree trunk surface before interpolation, the images after the interpolation can more accurately reflect the tree trunk surface morphology characteristics such as knots, texture, etc. This study provides an effective technical basis for further research and establishment of three-dimensional digital archives of famous and ancient trees.
Keywords:3D laser scanning technology; seven-parameter; b-spline algorithm
0 引言
古樹是指具有百年樹齡以上的樹木,樹齡超過300年且稀少的古樹為一級古樹;名木則是指具有名貴、稀有、歷史價值及紀念意義等特點的樹種且不受樹齡限制的樹木。古樹與名木既是自然界賦予人們的林業(yè)資源又是歷史傳承下來的“綠色遺產(chǎn)”,這些珍而貴的財富是歷史的見證,是活著的文物,亦是中華民族歷史與文化傳承的鑒證,具有科研與文化等多重保護價值[1]。然而隨著社會的更替,人與自然環(huán)境等因素的變遷,古樹名木已在不同程度上遭受了破壞,面臨著生存的威脅[2]。因此應用現(xiàn)代化科技手段監(jiān)控其生長、生存狀況,進而實現(xiàn)對其保護具有非常重要的意義。
三維激光掃描技術又被稱為“360度實景復制技術”[3],這項高新技術始現(xiàn)于20世紀90年代的中葉,是繼GPS技術之后測繪領域的一次革命,通過激光掃描測量的方式,能夠高精度采集目標物表面完整的海量點云數(shù)據(jù),可高分辨率地獲取物體表面各個點的多種信息,具有主動、實時、非接觸和迅速等特點[4]。
在早些時期的逆向工程學、計算機圖形學和工業(yè)制造設計中三維激光掃描技術就已應用其中,目前則在更為廣泛的領域中得到了應用,更擴展至考古學、刑偵學、醫(yī)學、面部檢測識別和軍事科技等領域[5-9]。
近年來,在林業(yè)領域中該項技術越發(fā)得到關注,國外就三維激光掃描技術在林業(yè)應用中進行了較為深入的研究,其主要內容分別集中在測樹因子、枝葉提取分離、單木三維重建及森林結構的研究等方面[10-12];國內研究主要集中在樣木表面三維模型的建立及獲取測樹因子等方面內容用于森林資源調查與保護。目前可以通過構建樹木表面三維模型,判斷出樣木表面是否有蟲洞或破損,建立數(shù)據(jù)庫,可用于古樹名木的保護。同時通過對樹木的三維重建獲得的數(shù)據(jù)可以完全實現(xiàn)樹冠體積和表面積、樹干材積的計算及冠下高、冠下徑、冠長、胸徑和任意處直徑等參數(shù)的測量[13-17],也可通過樹葉的點云數(shù)據(jù)獲取樹木的三維測量值。
綜合以上分析本文采用三臺Gocator2080型號三維智能激光掃描儀對稱安裝的方式,設計了一種能夠實現(xiàn)對樹干表面形貌進行360°全方位激光掃描裝置。采用七參數(shù)法利用四球標定靶,對三臺坐標相互獨立的Gocator三維智能激光掃描儀的坐標系進行機械標定。使用標定后的三維激光掃描裝置采集樹干表面形貌三維點云數(shù)據(jù),最終使用三次B樣條插值算法實現(xiàn)對樹干表面形貌的三維重建。
1 樹干表面形貌點云數(shù)據(jù)采集
1.1 實驗材料選取
實現(xiàn)對樹干表面形貌的精確三維重建是實現(xiàn)名樹古木三維數(shù)字化檔案建立的重要步驟。本研究選取北方常見的興安落葉松樹干表面形貌為研究對象,通過設計一套全方位樹干表面形貌三維激光平移升降裝置來實現(xiàn)對樹干表面形貌三維點云數(shù)據(jù)的采集。
按照三維激光掃描儀的測距原理可以將三維激光掃描儀劃分為基于脈沖測距、相位測距和激光三角測距原理的三大類。考慮到對樹干表面形貌進行測繪,測量距離較近,而對測量精度的要求比較高。綜合考慮對樹干表面形貌進行激光掃描和三維重建的基本要求以及幾種不同原理三維激光掃描儀的各自特點,本研究確定選取使用測距范圍較小,但測量精度最高的基于激光三角測距原理的加拿大LMI technologies公司生產(chǎn)的Gocator 2080系列一體式3D激光智能掃描儀。
由于采用一體式封閉設計,這種掃描儀具有體積小、質量輕、精度高和拆裝方便等特點。同時,與其他便攜式的地面三維激光掃描儀相比,其價格也相對較為低廉,十分適合用于對樹干表面形貌的三維重建研究。
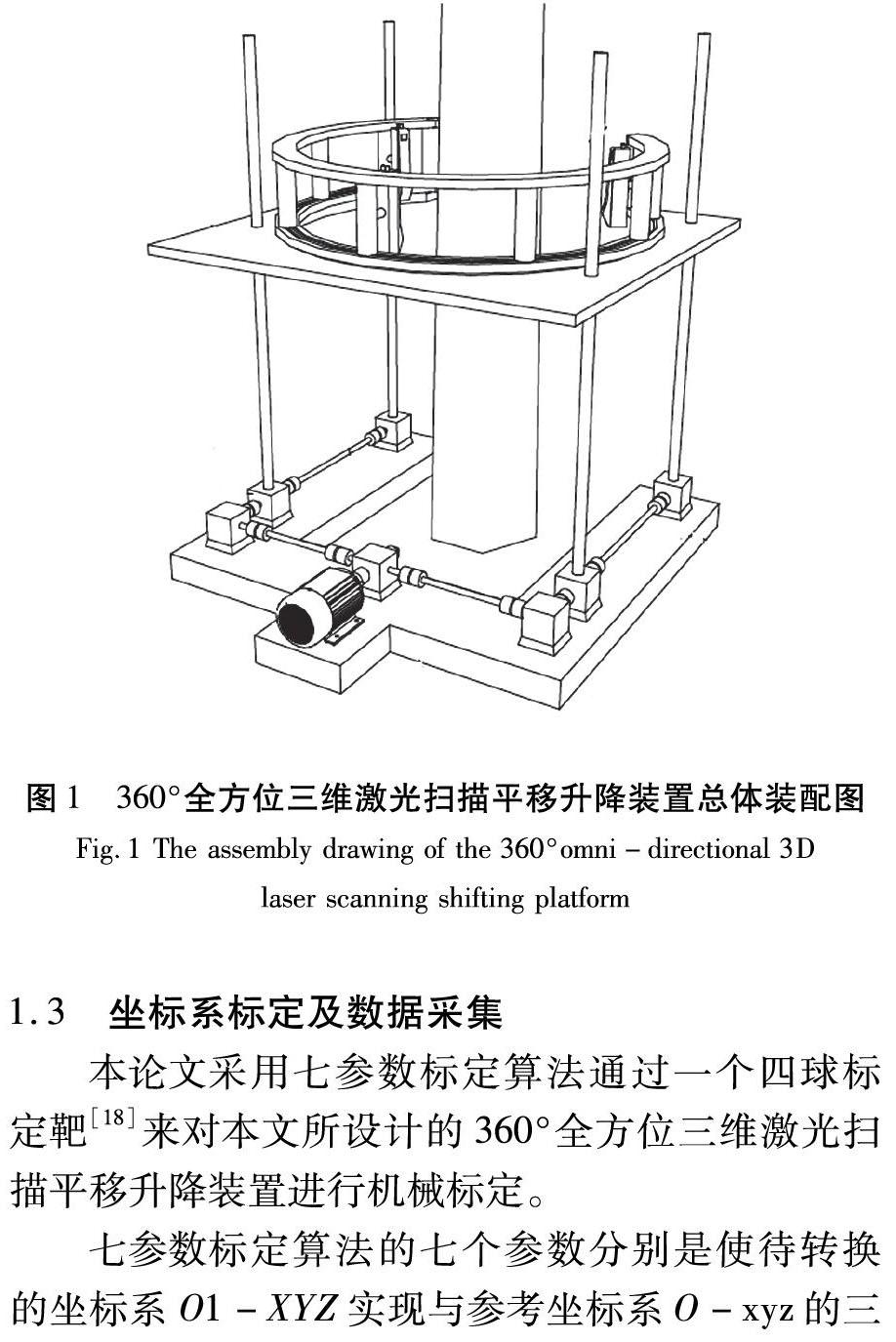
1.2 全方位三維激光掃描平移升降裝置
本研究所使用的全方位樹干表面形貌三維激光掃描平移升降裝置主要由掃描平臺、平移升降臺(平移升降臺又包括升降機構和基座部)和中控設備三部分組成。其中基座部處于最下端,與地面接觸,升降機構安裝在基座部上,掃描平臺安裝在升降機構上。通過中控系統(tǒng)能夠控制掃描平臺相對于基座部進行水平升降運動。其整體裝配示意圖如圖1所示。
通過利用最新改進的節(jié)點插入算法插入n+1個節(jié)點,大約需要使用9n次乘除法以及12n次加減法計算,然而使用傳統(tǒng)的Olso算法進行節(jié)點插入計算需要近似12n次乘法和除法以及16n次的加法。綜合對比可以發(fā)現(xiàn),使用改進后的節(jié)點插入算法能夠極大地提高生成效率。由以上推導,基于三維均勻B樣條曲線三維建模的算法描述如下:
(1)首先依據(jù)木材形狀的每個角點Ci計算木材的初始控制點Pi,然后依據(jù)控制點構建相應的三次均勻B樣條曲線。
(2)根據(jù)公式(10)可以得到三次均勻B樣條曲線的誤差值和木材的原始輪廓的誤差值,根據(jù)這些誤差值選出平均誤差最大的區(qū)間段。
(3)在該平均誤差最大的區(qū)間段內插入幾個節(jié)點,并且經(jīng)由公式(15)計算出插入的節(jié)點,并重新獲得新的三次均勻B樣條曲線。
(4)計算重新獲得的三次均勻B樣條曲線與木材原始輪廓的誤差值,如果其計算結果仍然是高于誤差平均值,那么就繼續(xù)執(zhí)行公式(15),否則就執(zhí)行公式(10),直到三次均勻B樣條曲線的每一個區(qū)間段的誤差值都小于平均誤差值。
3 實驗結果及討論
為了實現(xiàn)樹干表面形貌的快速三維重建,在原始點云數(shù)據(jù)采集過程中,將點云數(shù)據(jù)的掃描間隔設置為2 mm。將原始點云數(shù)據(jù)生成的曲線作為初始曲線,直接進行三維重建的結果如圖2所示。
從圖2中可以看出,由于數(shù)據(jù)采集過程中,數(shù)據(jù)采集的間隔過大,導致樹干表面形貌三維重建結果誤差較大,表面形貌失真嚴重。
圖3是經(jīng)使用節(jié)點插值改進后的三次均勻B樣條插值處理后的樹干表面形貌三維重建圖像,可以看出與圖2插值前的三維重建圖像相比,插值后的樹干表面形貌三維重建圖像表面紋理更為光滑,節(jié)子和表面凸起等細節(jié)部分也更為細膩。
4 結論
本文采用三臺Gocator 2080系列一體式3D激光智能掃描儀對稱安裝的方式,設計了一種能夠實現(xiàn)對樹干表面形貌進行360°全方位三維激光掃描的樹干表面形貌三維激光掃描裝置。采用七參數(shù)法對三臺坐標相互獨立的Gocator三維智能激光掃描儀的坐標系進行機械標定。為了加快數(shù)據(jù)采集速度,減少數(shù)據(jù)存儲量,在使用標定后的三維激光掃描裝置采集樹干表面形貌三維點云數(shù)據(jù)時,設置了較大的數(shù)據(jù)采集間距。對于表面形貌相對粗糙的樹干,直接對所采集樹干表面形貌三維激光點云數(shù)據(jù)進行三維重建的結果細節(jié)缺失嚴重,重建效果不理想。對此采用基于節(jié)點插入改進的三次B樣條算法進行插值處理,獲得的三維重建圖像能夠準確地反映出樹干表面的節(jié)子和紋理等表面形貌特征。本文的研究為進一步研究和建立名木三維數(shù)字檔案,監(jiān)測和研究名木的健康狀況提供了可靠的技術基礎。
【參 考 文 獻】
[1]段斌.淺議黃鶴樓景區(qū)古樹名木的保護[J].現(xiàn)代園藝,2018,40(7):165-167.
DUAN B. Discussion on the protection of ancient and famous trees in the scenic area of Yellow Crane Tower[J]. Modern Horticulture, 2018, 40(7): 165-167.
[2]李清泉,楊必勝,史文中,等.三維空間數(shù)據(jù)的實時獲取、建模與可視化[M].武漢:武漢大學出版社,2003.
LI Q Q, YANG B S, SHI W Z, et al. Real-time acquisition, modeling and visualization of 3D spatial data[M]. Wuhan: Wuhan University Press, 2003.
[3]王方建,習曉環(huán),萬怡平,等.大型建筑物數(shù)字化及三維建模關鍵技術分析[J].遙感技術與應用,2014,29(1):144-150.
WANG F J, XI X H, WAN Y P, et al. Key technology analysis of digital building and 3D modeling of large buildings[J]. Remote Sensing Technology and Application, 2014, 29(1): 144-150.
[4]杜曉燕.基于3D傳感器的掃描儀研制[D].鄭州:鄭州大學,2017.
DU X Y. Development of scanner based on 3D sensor[D]. Zhengzhou: Zhengzhou University, 2017.
[5]謝雄耀,盧曉智,田海洋,等.基于地面三維激光掃描技術的隧道全斷面變形測量方法[J].巖石力學與工程學報,2013,32(11):2214-2224.
XIE X Y, LU X Z, TIAN H Y, et al. Measurement method of tunnel full-section deformation based on ground 3D laser scanning technology[J]. Chinese Journal of Rock Mechanics and Engineering, 2013, 32(11): 2214-2224.
[6]SALAMANCA S, MERCHAN P, ADAN A, et al. An appraisal of the geometry and energy efficiency of parabolic trough collectors with laser scanners and image processing[J]. Renewable Energy, 2019, 134:64-77.
[7]VILLA C, CATTANEO C, BUCKBERRY J,et al. Surface curvature of pelvic joints from three laser scanners: separating anatomy from measurement error[J]. Journal of Forensic Sciences, 2015, 60(2):374-381.
[8]GOBEL W, KAMPA B M, HELMACHEN F. Imaging cellular network dynamics in three dimensions using fast 3D laser scanning[J]. Nature Methods, 2007, 4(1):73-79.
[9]羅旭,馮仲科,鄧向瑞,等.三維激光掃描成像系統(tǒng)在森林計測中的應用[J].北京林業(yè)大學學報,2007,,29(2):82-87.
LUO X, FENG Z K, DENG X R, et al. Application of 3D laser scanning imaging system in forest measuring[J]. Journal of Beijing Forestry University, 2007, 29(2):82-87.
[10]王佳,楊慧喬,馮仲科.基于三維激光掃描的樹木三維綠量測定[J].農(nóng)業(yè)機械學報,2013,44(8):229-233.
WANG J, YANG H Q, FENG Z K. Tridimensional green biomass measurement for trees using 3-D laser scanning[J]. Journal of Agricultural Machinery, 2013, 44(8):229-233.
[11]RAHMAN M Z A, BAKAR A A, RAZAK K A, et al. Non-destructive, laser-based individual tree aboveground biomass estimation in a tropical rainforest[J]. Forests, 2017, 8(3): 86.
[12]LIN Y, HEROLD M. Tree species classification based on explicit tree structure feature parameters derived from static terrestrial laser scanning data[J]. Agricultural & Forest Meteorology, 2016, 216: 105-114.
[13]HEINZEL J, HUBER M O. Detecting tree stems from volumetric TLS data in forest environments with rich understory[J]. Remote Sensing, 2016, 9(1): 9.
[14]LAMPRECHT S M, HILL A, STOFFELS J, et al. Erratum: A machine learning method for co-registration and individual tree matching of forest inventory and airborne laser scanning data. remote sens. 2017, 9, 505[J]. Remote Sensing, 2017, 9(7):692.
[15]LIN Y, HYYPPA J, KUKKO A, et al. Tree height growth measurement with single-scan airborne, static terrestrial and mobile laser scanning[J]. Sensors, 2012, 12(9):12798-12813.
[16]姚建平,肖江,閆磊,等.基于3D結構激光的木材表面缺陷檢測的研究[J].林業(yè)機械與木工設備,2017,45(3):20-25.
YAO J P,XIAO J,YAN L,et al.Study on detection of wood surface defects based on 3D structure laser[J].Forestry Machinery & Woodworking Equipment,2017,45(3):20-25.
[17]倪海明.多激光掃描儀三維重建技術研究及其在木材檢測中的應用[D].哈爾濱:東北林業(yè)大學,2018.
NI H M. Multiple laser scanners 3D reconstruction technology and its application in wood testing[D]. Harbin: Northeast Forestry University, 2018.
[18]ZHANG B, MOLENBROEK J F M. Representation of a human head with bi-cubic B-splines technique based on the laser scanning technique in 3D surface anthropometry[J]. Applied Ergonomics, 2004, 35(5):459-465.
[19]KANG S, KWON K H. Generalized average sampling in shift invariant spaces[J]. Journal of Mathematical Analysis and Applications, 2011, 377(1):70-78.
[20]賴志柱,張云艷.牛頓插值法的多種講解思路分析研究[J].貴州工程應用技術學院學報,2015,33(2):144-147.
LAI Z Z, ZHANG Y Y. Analysis of various explanations of Newtons interpolation method[J]. Journal of Guizhou College of Engineering and Application, 2015,33(2): 144-147.
[21]王靜文,劉弘.基于B樣條曲線的植物葉片幾何建模[J].計算機應用研究,2013,30(5):1571-1573.
WANG J W, LIU H. Geometric modeling of plant blades based on b-spline curve[J]. Application Research of Computers, 2013, 30(5):1571-1573.
[22]PARK H. An error-bounded approximate method for representing planar curves in b-splines[J]. Computer Aided Geometric Design, 2004, 21(5):479-497.