消費級無人機數字攝影測量1∶500成圖應用淺析
2019-10-12 04:00:28張海坤謹雪朝馬果楨陳盼盼岳魁
資源導刊(信息化測繪) 2019年9期
關鍵詞:系統
張海坤 謹雪朝 馬果楨 陳盼盼 岳魁
(1.河南省地質礦產勘查開發局 第二地質勘查院,河南 鄭州 450000;2.河南省測繪工程院,河南 鄭州 450003;3.山東正元航空遙感技術有限公司,山東 濟南 250000;4.河南省煤田地質局 物探測量隊,河南 鄭州 450000;5.方宇勘測有限公司,河南 鄭州 450000)
1 引言
近年來,消費級電動固定翼無人機取得了較大發展,以其成本較低,操作、維護簡單等優勢,在小范圍航測作業中得到廣泛應用[1-2]。航測作業中像控點布設十分重要,低空無人機獲取的影像有像幅小、像片多、重疊率不規則和影像傾角過大等特點[3-5],其成圖精度受地面像控點的分布和數量影響。本文以消費級天行者X8 航空模型為載機,加載自駕儀與索尼NEX-3N 數碼相機構建一套低成本、易操作、易維護的航空攝影測量系統,以此完成航攝獲取試驗區影像,并通過不同的像控點布設方案進行1∶500 航測精度的分析,以驗證構建的無人機系統在航測領域的可行性。
2 無人機航測系統簡介
無人機航測系統以Skywalker Tech 公司生產的天行者X8 為載機,使用高放電電流的鋰電池驅動電動機作為動力設備,搭載飛控系統和任務設備配合地面站和數據鏈組成無人機低空航測系統。無人機低空航測系統主要劃分為飛行系統、任務載荷和地面系統[6],無人機低空航測系統結構如圖1 所示。
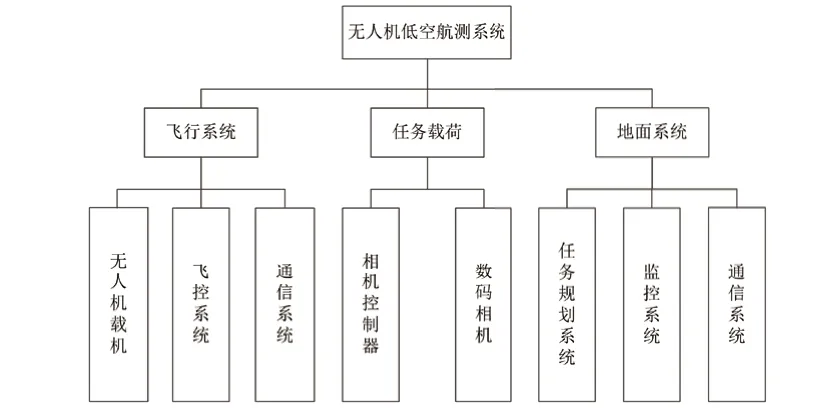
圖1 無人機低空航測系統結構
2.1 飛行系統
無人機飛行系統包括載機、飛控系統和通信系統。無人機載機是所有空中設備的載體,除機體外還包括執行機構、伺服系統、動力系統。飛控系統接收并處理由地面站發送的控制信息,按照預設指令控制無人機飛行并按條件執行預設命令,包含GPS 模塊、加速度計模塊等傳感器和微處理器。通信系統主要是指飛控系統與地面站進行通信的數傳電臺,需要無人機載端與地面系統端配套使用。
2.2 任務載荷
為獲取地面影像數據,航測無人機一般搭載各種相機作為任務載荷。由于無人機所能搭載設備的質量較小,一般使用單反或者微單相機進行作業。由于上述相機不是專用量測相機,在進行航攝作業前要對相機進行標定以求解其內方位元素并進行畸變改正。
2.3 地面系統
地面系統包括任務規劃系統、監控系統和通信系統,其主要作用是在無人機組裝調試階段對飛控系統進行調試設置,并在飛行過程中保障飛行系統正常工作。任務規劃系統負責完成無人機飛行過程中的飛行高度、航向、曝光間隔等航線設計工作。監控系統負責對無人機飛行狀態進行監控并對飛行任務臨時進行更改、飛行故障的應急處置等。通信系統負責無人機與地面系統之間的通信,是地面系統對無人機進行任務規劃和監控的紐帶。
3 無人機數字攝影測量成圖
3.1 試驗數據獲取
試驗區位于華東地區,地勢平坦,無明顯高低起伏。采用無人機低空航攝系統,獲取了試驗區的低空數碼影像,其航攝作業參數如表1 所示。測區共有8 條航帶332 張影像,航帶排列如圖2 所示。
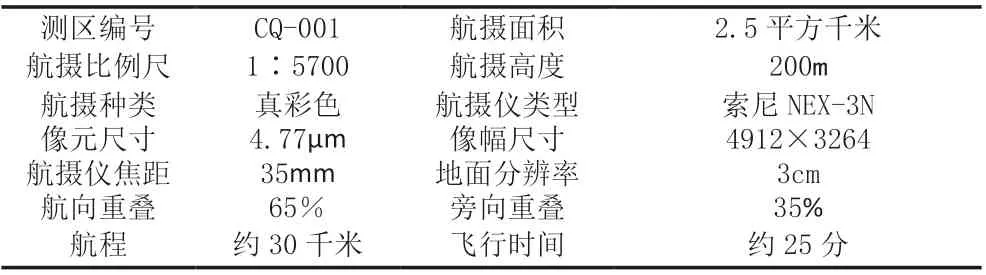
表1 航攝作業參數
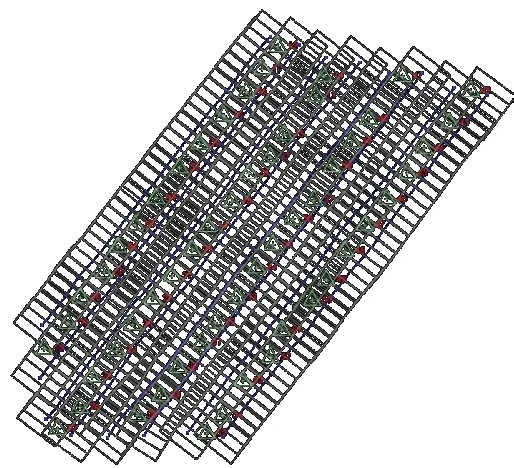
圖2 航帶排列圖
3.2 像控點布設方案
根據像控點布設及后續處理手段的不同,像控點布設方案分全野外布點和非全野外布點兩種。全野外布點外業實測點位數量多、工作量大,一般只適用于精度要求高、小面積區域或者特殊區域的航測作業。非全野外布點按照一定要求在外業只實測部分控制點,通過空三加密的方式求解一定數量的加密點和所有像片的外方位元素,能在滿足一定精度的情況下大幅減少實測控制點的數量,生產中主要使用該方法布設像控點。
非全野外布點方法又分為區域網法、航帶網法等,一般采用區域網法進行像控點布設[7-9]。在進行布點設計前,需要綜合考慮原始影像分辨率、成果的精度要求等多種因素,在符合攝影測量內業規范對空三加密精度要求的基礎上,對布點方案進行優化設計。
為驗證不同像控點布設方案對精度的影響,在本次試驗中按照使用的像控點數量從少到多共設計4 種控制點布設方案。
方案1:在測區四角分別布設一個平高控制點。
方案2:在測區四周及中間部位共布設9 個平高控制點。
方案3:航向每6 條基線、旁向每2 條航帶布設1個平高像控點。
方案4:航向每3 條基線、旁向每2 條航帶布設1個平高像控點。
3.3 內業數據處理
無人機低空影像數據的內業處理采用Inpho軟件,使用該軟件進行空三加密處理需提供影像文件、相機文件、控制點數據和POS 數據。相機文件由相機檢校得到,用于提供相機參數的初始值;控制點數據包括實地測量的像控點、檢核點坐標及對應的刺點圖,將根據不同的試驗方案導入系統進行處理;POS 數據是飛控系統記錄的相機曝光時刻的GPS/IMU 信息,用于排列像片并建立航帶。空三結束后,將Inpho 空三處理結果導出為PATB 格式,再導入VirtuoZo 軟件,建立立體模型后進行立體數據采集,完成DLG 制作[10-11]。
4 精度分析
按照上述4 種像控點布設方案實地進行像控點測量,在測量像控點的同時選擇一定的地物作為檢核點以評定后續數據處理的精度,在本次試驗中檢核點為73 個。目前,評價空三平差精度主要看檢查點和內業加密點的精度,分別統計較差和中誤差。中誤差采用公式(1)進行計算。

公式(1)中,m 為點的中誤差,單位為米;Δ 為點的坐標較差,單位為米;n 為參與評定精度的點的個數。
根據《數字航空攝影測量空中三角測量規范》(GB/T 23236—2009)中1∶500 比例尺成圖對空三解算精度的規定要求,分別對上述4 種方案進行空三平差,平差后像控點平面殘差與高程殘差統計如表2 所示。
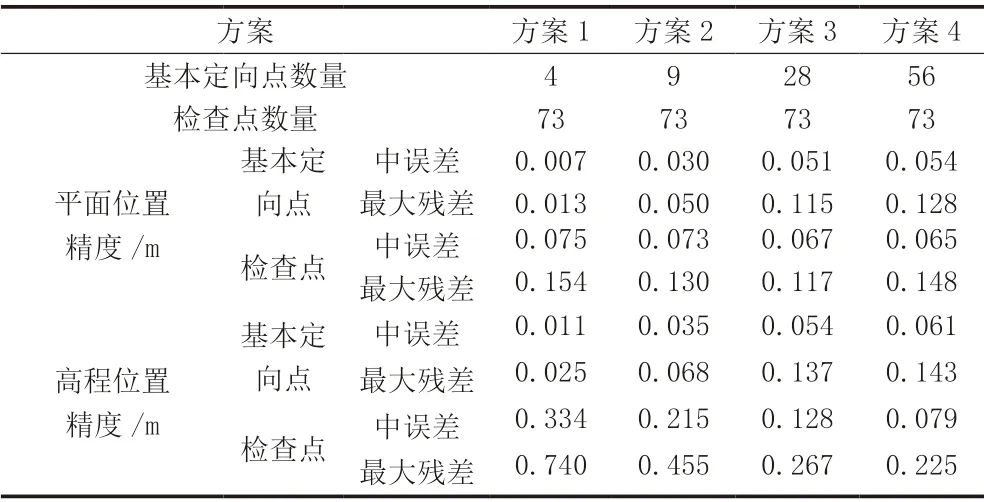
表2 試驗區空三精度統計
表2 中,基本定向點平面位置中誤差,平地、丘陵地不應大于0.13m;檢查點平面位置中誤差,平地、丘陵地不應大于0.175m;基本定向點高程位置中誤差,平地不應大于0.11m,丘陵地不應大于0.2m;檢查點高程位置中誤差,平地不應大于0.15m,丘陵地不應大于0.28m。
5 結論
根據航攝條件及不同的像控點布設方案,可得出結論:各方案平差后檢核點平面精度相差不大。隨著像控點數目的增加,平面精度略有改善,表明像控點的布設方案對平面精度影響較小,像控點的增加與優化對平面精度沒有明顯提高。隨著像控點的增加,空三加密后檢核點誤差逐漸逼近像控點殘差,在方案4的基礎上進一步提高像控點布設密度不會明顯提高空三加密的精度。上述4 種布點方案平面精度均滿足相關規范對于平地區域1∶500 比例尺測繪的要求,但只有方案4的高程精度滿足1∶500比例尺測繪要求。因此,應該合理布置像控點,力求達到經濟、適用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32