麋鹿測試駕駛場景下智能駕駛機器人的應用
2019-10-14 14:42:55鄭繼虎徐發達張蘇林徐樹杰張慶余
時代汽車 2019年9期
鄭繼虎 徐發達 張蘇林 徐樹杰 張慶余
摘 要:伴隨著智能網聯汽車的快速發展,汽車的主動安全性能越來越受到關注。麋鹿測試是針對汽車轉向、底盤、懸掛三大硬件系統和ESP功能的高速高危測試試驗,用于檢驗汽車在高速行進場景下完成S轉向的主動安全性能。本文首先對麋鹿測試ISO標準規范進行解讀,并論證了智能駕駛機器人替代駕駛員完成測試以保障測試過程中人身安全的可行性,并通過實驗驗證了智能駕駛機器人在麋鹿測試中的可靠性。
關鍵詞:麋鹿測試(Moose test);智能駕駛機器人;路徑規劃
1 引言
“中國制造2025”將汽車產業列為十大關鍵領域之一,其中智能網聯汽車作為行業發展兩大主題之一備受關注[1],在國家政策的支持和行業機構的參與下,智能網聯汽車產業快速發展。中國汽車技術研究中心已將車輛的主動安全納入到中國新車評價規程(C-NCAP)測試評價體系中,以汽車AEB功能測試為例,在測試過程中如何保障測試人員安全、保證車輛航向角度和車輛速度精確性的問題亟待解決[2]。
中國汽車技術研究中心自主研發的智能駕駛機器人,通過模擬人類駕駛員踩踏板、打轉向和換檔位的動作,設計了一種可控制車輛完成轉向、速度和檔位控制的機械結構,能夠在不對車輛進行任何改裝的前提下替代駕駛員進行可靠性、危險性和高精度的車輛道路試驗。
2 麋鹿測試
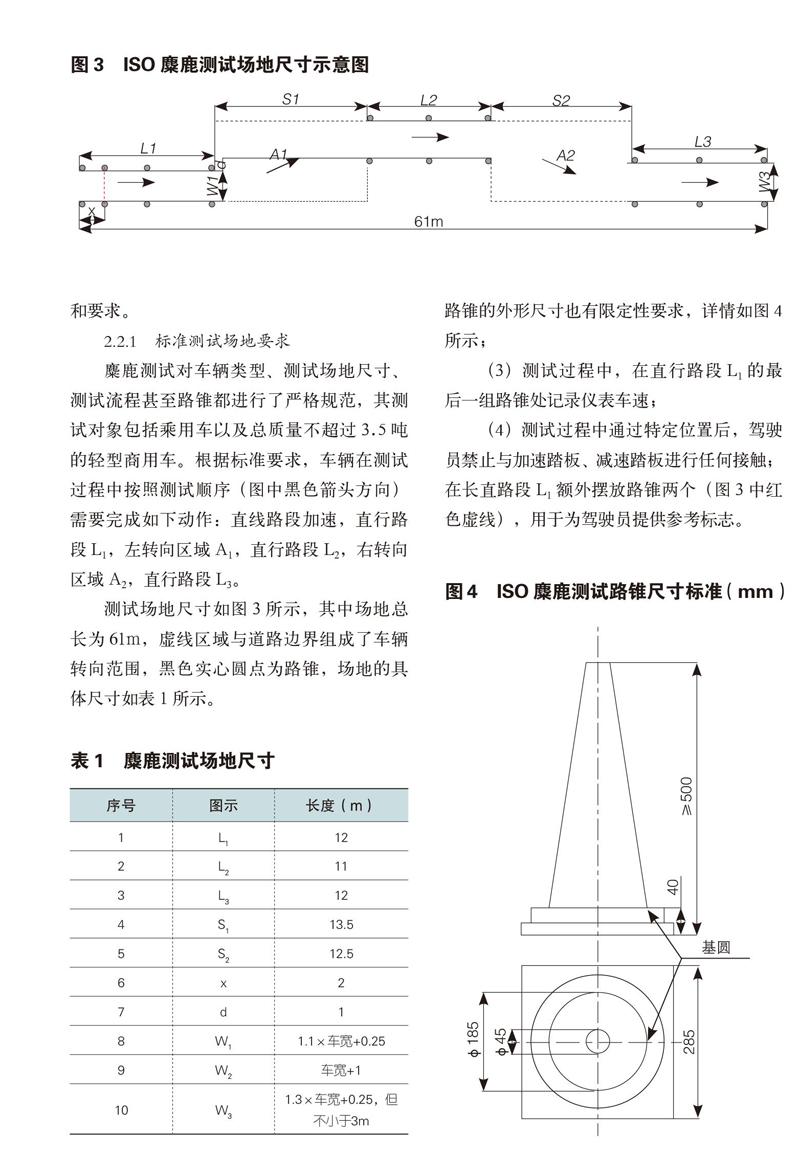
ISO 3888-2:2002規定了一種汽車在高速場景下進行緊急避障的麋鹿測試,在測試過程中對速度的控制精度要求高,并存在爆胎、失控甚至翻車的安全威脅[3]。麋鹿測試(Moose test)中“Moose”是指瑞典特有的駝鹿,駝鹿習慣高速橫穿公路,由于其四肢高于乘用車前端高度,但成年駝鹿的體重在300-500kg,雄性駝鹿還有巨大的堅硬鹿角。一旦與高速行駛的車輛碰撞,駝鹿纖細的四肢會被撞斷,整個身體由于慣性拍向前擋風玻璃,并且安全氣囊順利彈出概率很小,極易造成傷亡事故。
2.1 麋鹿測試的原因
圖1為駝鹿與車輛高度的對比示意圖,其中紅色虛線表明成年駝鹿四肢高度與SUV車型前端高度基本相等。圖2對駝鹿橫穿馬路與車輛碰撞進行了圖示說明,由圖2可知在汽車前進方向上發生碰撞,該方向上動量守恒,具體計算說明如下:
根據動量守恒可得:
碰撞時間近似等于汽車以碰撞前速度行進駝鹿肢體寬度的距離所需時間,即:
將,,帶入上述兩式,計算可得碰撞瞬間沖擊力為:
由此可知,在汽車與駝鹿碰撞的瞬間會產生巨大的沖擊力,前擋風玻璃和車輛A柱無法承受如此巨大的沖擊,嚴重威脅駕駛員的生命安全。
據不完全統計,在瑞典每年至少每公里發生一次駝鹿撞車事故,每年超過2000頭駝鹿死于交通事故[4],事故中車輛安全氣囊無法正常彈出、前擋風玻璃無法承受駝鹿巨大體重的沖擊等問題使得車輛的被動安全配置無用武之地,因此只能要求對車輛的主動安全性能進行優化和完善,尤其是在緊急情況下車輛的避障和避障后航向糾正的能力。
2.2 麋鹿測試的規范
麋鹿測試在ISO標準中名稱為Passenger cars-Test track for a severe lane-change manoeuvre-Part 2:Obstacle avoidance,屬于國際標準ISO 3888內容之一,該標準針對車輛的動態性能和抓地能力的進行了規范和要求。
2.2.1 標準測試場地要求
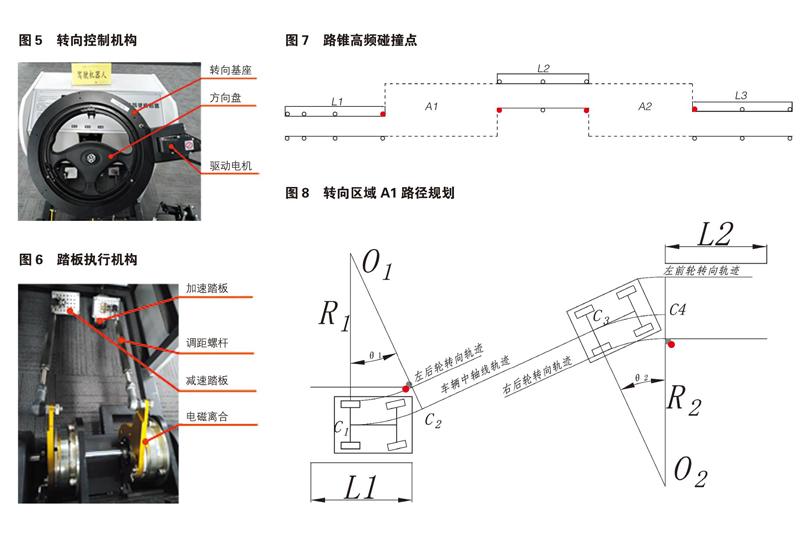
麋鹿測試對車輛類型、測試場地尺寸、測試流程甚至路錐都進行了嚴格規范,其測試對象包括乘用車以及總質量不超過3.5噸的輕型商用車。根據標準要求,車輛在測試過程中按照測試順序(圖中黑色箭頭方向)需要完成如下動作:直線路段加速,直行路段L1,左轉向區域A1,直行路段L2,右轉向區域A2,直行路段L3。
測試場地尺寸如圖3所示,其中場地總長為61m,虛線區域與道路邊界組成了車輛轉向范圍,黑色實心圓點為路錐,場地的具體尺寸如表1所示。
其中,標準中對特定位置和特殊尺寸進行了強調:
(1)測試開始前,首先測量車輛寬度,標準中要求的車寬不包括車輛兩側后視鏡寬度;
(2)路錐擺放要求為每段長直路段起點中點終點各一個,擺放時路錐基圓必須與道路邊界外切以保證場地尺寸的準確性,另外路錐的外形尺寸也有限定性要求,詳情如圖4所示;
(3)測試過程中,在直行路段L1的最后一組路錐處記錄儀表車速;
(4)測試過程中通過特定位置后,駕駛員禁止與加速踏板、減速踏板進行任何接觸;在長直路段L1額外擺放路錐兩個(圖3中紅色虛線),用于為駕駛員提供參考標志。
2.2.2 測試流程要求
根據ISO標準要求,麋鹿測試步驟如下:
(1)按照場地尺寸要求完成區域規劃和路錐擺放,測試車輛乘客滿載并在后備箱配備相應負重以達到車輛的客貨滿載狀態;
(2)啟動車輛,在進入直行路段L1時保證車輛發動機轉速不低于2000r/min;
(3)通過直行路段L1的虛線位置時,松開加速踏板,在完成測試前不進行任何踏板操作;
(4)在測試過程中,嚴禁車輛與任意路錐有任何接觸,若滿足此條件則該速度下麋鹿測試通過,反之,則再次進行試驗;
(5)在車輛性能允許的前提下,不斷的提高車輛速度,重復測試步驟(1)(2)(3)(4)直至達到車輛可完成測試的最大速度;
(6)達到測試最大速度后,記錄下測試車輛儀表盤速度,再次以該速度進行兩次測試以保證測試結果的有效性。
3 智能駕駛機器人場景應用
通過第二章對麋鹿測試標準的分析可知,麋鹿測試存在著以下幾個問題亟待解決,具體如下:
(1)車輛測試速度快,轉向快,橫向加速度大,車輛極易發生側傾、側滑甚至翻車的危險,駕乘人員安全難以保障;
(2)車輛對發動機轉速和松開加速踏板的位置等參數要求非常嚴格,并且測試過程中禁止接觸加速踏板和減速踏板;
(3)為了保證測試的完成,需要具有豐富駕駛經驗的駕駛員操控車輛,重復的高速閃避測試影響駕駛員效率;
智能駕駛機器人能夠在高危場景、重復性測試場景和對精度高要求的測試場景下替代人類駕駛員完成測試實驗。一方面保障麋鹿測試中駕乘人員的安全,另一方面也能夠保障麋鹿測試的效率和準確性。
3.1 智能駕駛機器人機構解決方案
中國汽車技術研究中心基于車輛耐久性測試試驗需求完成了智能駕駛機器人的研發和產品迭代,目前已經完成了第三代產品的開發與實車測試工作。考慮到麋鹿測試對精度的嚴苛要求和安全隱患,智能駕駛機器人經過結構優化和算法升級已經完全可以替代駕駛員完成高速場景下緊急避障的麋鹿測試。
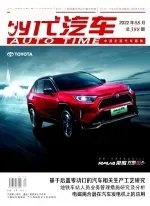
面向麋鹿測試的智能駕駛機器人機構包括轉向控制機構和踏板執行機構兩大部分。其中,轉向控制機構(如圖5所示)的機械原理為,驅動電機輸出軸上安裝有主動齒輪,與主動齒輪嚙合的從動齒輪帶動轉向基座轉動,轉向基座通過尼龍綁帶固定在方向盤上,從而實現車輛的轉向控制。轉向控制機構可實現對車輛方向盤在±500°的區間內進行控制,并且能夠柔性適應滿足國標要求的方向盤尺寸,最大程度的減小了由于裝配不同軸引起的控制誤差。
踏板執行機構(如圖6所示)則是通過電機帶動曲軸連桿機構實現加速踏板和減速踏板的踩踏、釋放動作,是對人類駕駛員踏板控制動作的模仿。正常駕駛過程中,駕駛員無需同時踩踏加速和減速兩個踏板,因此,踏板執行機構采用一部驅動電機配備電磁離合交叉斷開吸合的形式實現對兩個踏板的不同步控制。踏板執行機構通過調距螺桿支撐的方式,可適應上汽集團、長城汽車的多款車型前艙尺寸,并實現了加裝踏板執行機構的前提下主駕駛位可繼續乘坐安全員的測試要求。
3.2 智能駕駛機器人算法解決方案
麋鹿測試對直行路段和轉向區域的長度做出了嚴格的限制,其車道寬度也取決于車輛寬度。考慮到測試路段縱向距離和轉向方式相對固定的,且測試過程中車輛速度略有減小而直行路段的寬度逐漸增大,所以測試首要問題是解決車輛在直行路段切換過程中左右轉向的控制問題。中國汽車技術研究中心針對麋鹿測試,目前采用預瞄點路徑規劃和PID算法相結合的控制方法對駕駛機器人的動作執行進行控制以保證車輛順利通過測試。
測試車輛在高速行駛工況下,從直行路段L1經轉向區域A1進入直行路段L2的過程中,車輛動作順序如下:左轉→直行→右轉;而在由直行路段L2經轉向區域A2進入直行路段L3的過程中,車輛則需要進行以下動作:右轉→直行→左轉。
經過參數分析和前期試驗得知,在左轉過程中直行路段L1末端左側和直行路段L3前端左側的路錐容易被車輛的左后輪碰撞,同理,在右轉過程中直行路段L2前端右側和末端右側的路錐容易被車輛的右后輪碰撞,高頻碰撞路錐如圖7中紅點所示。
測試車型的車輛軸距、車寬等參數是固定的,如何控制車輛的轉彎半徑成為測試路徑規劃中的首要考慮因素。測試過程中,車輛經過標示線速度后不再增加。對由L1經過A1進入L2這段距離研究分析時可近似認為車速不變,并且考慮到汽車轉向控制系統的強非線性特征,故對測試車輛采用預瞄點控制方法。
預瞄控制基于汽車行駛軌跡與預期路徑誤差最小原則,將預瞄點位置和車輛實時的位置、速度作為整個控制系統的輸入,通過計算車輛理想橫向加速度并考慮駕駛員反應滯后和車輛動態反應滯后的誤差,最終實現較為精準的測試車輛軌跡控制。
圖8為測試車輛經過轉向區域A1時的規劃路徑,當測試車輛行駛至C1位置時完成轉向角度為θ1的左轉動作,以O1為圓心,R1為半徑沿圓弧C1C2轉向行駛至C2,隨后直線行駛至C3,最后以O2為圓心,R2為半徑沿圓弧C3C4轉向行駛至C4,完成測試要求的第一次轉向。
當測試車輛行駛進入轉向區域A2前,車速相對轉向區域A1略有降低且直行路段L3寬度增加,車輛的轉向控制難度降低,在控制流程中,操作步驟與轉向區域A1相同,只是轉向方向改為右轉向,在此不再進行贅述。
中國汽車技術研究中根據ISO麋鹿測試標準進行了場地規劃,基于預瞄點路徑規劃的PID控制算法對智能駕駛機器人動作進行控制,最終操控長城汽車某款SUV以30Km/h和50Km/h的行駛速度(如圖9所示)順利完成了麋鹿測試。
4 總結
伴隨著ADAS技術的逐漸成熟,汽車的智能化程度也越來越高。中國的道路交通場景中包括機動車、自行車、電動車、行人等多個參與者使得駕駛場景更為復雜,因此,對汽車的安全性能提出了更為嚴苛的要求。
智能駕駛機器人技術的發展和成熟,為傳統的被動安全性能測試和以麋鹿測試為代表的主動安全性能測試場景中的高危測試場景提供了行之有效的解決方案,一方面最大限度的保障測試結果的準確性和有效性,另一方面也最大程度的保障了實驗測試人員的人身安全。
參考文獻:
[1]于凱,吳志新,鄭繼虎,等.智能網聯汽車技術[M].北京:社會科學文獻出版社,2019:1-2.
[2]中國汽車技術研究中心有限公司.C-NCAP管理規則(2018年版)[S].2018:8-9.
[3]ISO 3888-2:2002,Passenger cars-Test track for a severe lane-change manoeuvre-Part 2:Obstacle avoidance[S].2003.
[4]http://dy.163.com/v2/article/detail/E389UP7U0521C5UM.html,2018.