修正的阿倫方差對調相閃爍噪聲的抑制
2019-10-15 05:46:12
中國空間科學技術 2019年4期
關鍵詞:測量
北京東方計量測試研究所,北京 100086
頻率穩定度是描述原子鐘穩定性的重要指標,原子鐘頻率穩定度的算法同時也影響著原子鐘性能的評估。但是,無論在何種測量環境下,噪聲對頻率穩定度測量的影響都無法完全消除,只能采取有效措施進行抑制。一般情況下,若想更有效地消除噪聲,需要更長的測量時間;但在同等測量時間內,怎樣更有效地降低噪聲對測量的影響則成為時間傳遞的關鍵。時間傳遞的本質就是傳遞過程中噪聲本身的測量。
原子鐘的溯源問題可以利用衛星遠程共視時間比對法解決,通過共視時間比對數據可以得到原子鐘的各項性能指標,包括頻率穩定度。在對頻率穩定度進行評估時,普遍采用阿倫方差。但是,與阿倫方差相比,修正的阿倫方差有其本身算法的優勢,可以有效地抑制噪聲尤其是調相閃爍噪聲對測量的影響。本文通過衛星共視時間比對法,利用實驗室主動型氫原子鐘與原子時標國家計量基準進行時間比對。通過兩地鐘的時間差數據對頻率穩定度進行評估,并分析了修正阿倫方差抑制調相閃爍噪聲的機理。
1 原子鐘噪聲特性
原子鐘噪聲的數學模型定義原子鐘t時刻的時差值為x(t),則原子鐘的時差模型可表示為[1-2]:

(1)
式中:a0為時刻偏差;a1為頻率偏差;a2為頻率漂移;ξ(t)為噪聲項。公式(1)稱為原子鐘時差的多項式模型,是通用的原子鐘時差數據的描述方法。時刻偏差一般指本地鐘與參考時鐘的秒脈沖1脈沖/s的相位差;頻率偏差指時間偏差的一階線性擬合的系數;頻率漂移率是頻率偏差隨時間單調變化的線性率;噪聲項是扣除原子鐘的系統性變化(即多項式模型)外的各類噪聲的綜合。對于其中的噪聲項,原子鐘的噪聲可用5種獨立的隨機過程表示[3-4],即:
ξ(t)=z-2(t)+z-1(t)+z0(t)+z1(t)+z2(t)
(2)
式中:zα(t) (α=-2,-1,0,1,2)代表5種獨立的噪聲過程:調頻隨機游走噪聲(Random Walk FM,RWFM)、調頻閃變噪聲(Flicker FM,FFM)、調頻白噪聲(White FM,WFM)、調相閃爍噪聲(Flicker PM,FPM)、調相白色噪聲(White PM,WPM)。但是并不是每個原子鐘在測量過程中都一定含有上述全部5種噪聲,一般情況下,只是2~3種噪聲在起主要作用。
2 修正的阿倫方差降噪機理
由于噪聲的非平穩性質,尤其是“閃爍噪聲”的存在,使得用標準差表征頻率穩定度時,結果將隨采樣數的增加而發散[5-6]。為了克服閃變噪聲隨時間變化出現的非平穩問題,D.W.Allan博士提出采用雙采樣方法對原子鐘的頻率穩定度進行評估,即Allan方差[7]。

(3)
式中:xi為時差序列;N為時差采樣數;τ0為采樣間隔。Allan方差通常以均方根的形式表示[8],ADEV或σy(τ0)。
與阿倫方差相比,修正的阿倫方差的均方根即MDEV的表達式如下[9-10]:

(4)
式中:xi為時差序列;N為時差采樣數;τ0為采樣間隔;m為在N采樣時差數內的采樣數。
Allan方差可以識別不同的噪聲類型[11],對不同噪聲的表征是通過不同的取樣時間體現的[12],即在一定的取樣時間內對應著一定的噪聲過程。在一定的取樣時間內,噪聲主要由幾種噪聲共同貢獻,但是實際上,無論采樣時間長短,5種噪聲都是共同作用在整個測量過程中的,只是噪聲系數的權重有所不同。而調相閃爍噪聲附加在信號上,引起信號的相位調制,它對短期頻率穩定度影響較大。因為附加噪聲頻譜較寬,高頻分量多樣,所以這種噪聲頻率變化很快。隨著取樣間隔的增加,這種起伏就會被平均掉。對于雙采樣的Allan方差而言,當取樣時間大于最小采樣間隔時,很多的采樣數據就沒有參與運算,取樣時間越大,未參與運算的時差數據就會越多,頻率穩定度的評估過程也就不能很好地抑制調相閃爍噪聲的影響,但MDEV卻可以很好地解決這個問題。
由式(4)可知,MDEV在計算頻率穩定度時與ADEV不同,MDEV用相鄰數據以m為長度的采樣數據的平均值作為當前計算的時差值,然后向下平移一個τ0(最小采樣間隔)的采樣數據,所有的采集數據都會參加運算。這樣的缺點是大大增加了運算量,且取樣總數也會相對減少。但對于頻率穩定度而言,MDEV可以視為對所有時差數據進行了平滑,對于高頻的噪聲能夠起到很好的濾波效果。式(4)中的m可以理解為平滑窗口的大小,隨著m的增大,平滑窗口也增大,也就是取樣數增大。但當平滑窗口過大,高頻分量的噪聲信號的平滑效果會降低,噪聲的抑制也就不再明顯。從這種角度講,MDEV也可以看成一種短期頻率穩定度評估中數據加窗平滑的降噪方法,高頻噪聲信號在時域短窗口的平滑中會被平滑掉,對于頻域而言就是被濾波掉,這就是MDEV對短期頻率穩定度評估優勢的機理。
3 試驗數據驗證與分析
試驗數據利用主動型氫原子鐘,遠程時間比對基準以原子時標國家計量基準即UTC(NIM)的時間頻率信號作為參考。通過兩地原子鐘同儒略日的CGGTTS數據處理得到氫原子鐘與UTC(NIM)的時間偏差,通過對兩地鐘時間差數據的解算可以得到平均相對頻率偏差、頻率穩定度等相關性能指標。試驗采用了共21天的共視時間比對數據,利用這21天的共視時間比對數據得到的ADEV頻率穩定度與MDEV頻率穩定度的結果如圖1、圖2所示。
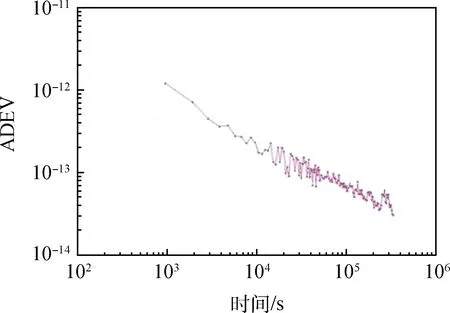
圖1 阿倫方差解算的頻率穩定度Fig.1 Frequency stability of Allan variance
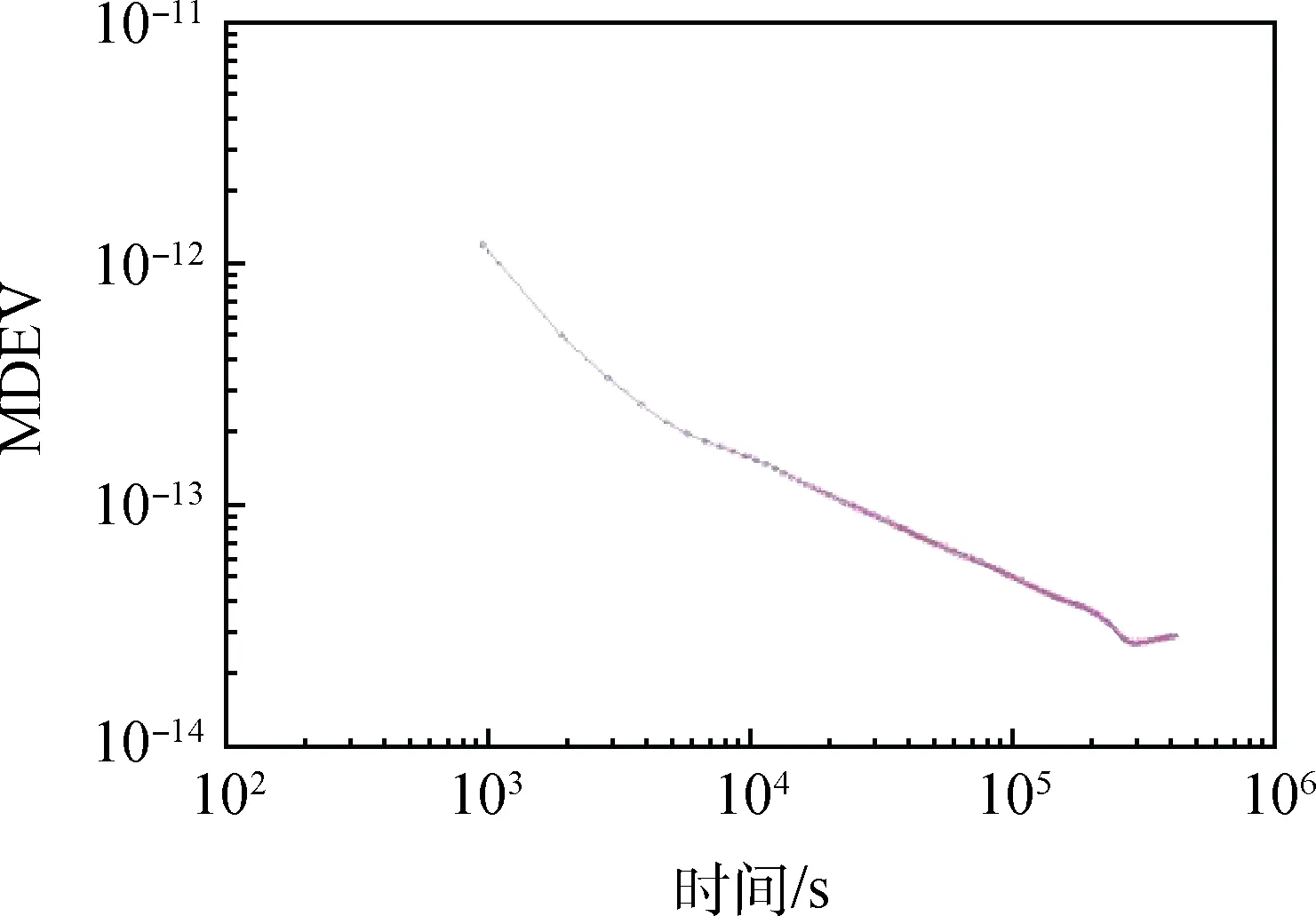
圖2 修正阿倫方差解算的頻率穩定度Fig.2 Frequency stability of modified Allan variance
比較圖1與圖2不難發現,同是頻率穩定度的計算,MDEV具有更好的數據平滑效果,在頻域范圍內也體現了MDEV濾波的效果。MDEV對于上述的5種噪聲類型的抑制情況可以通過時域噪聲模型進行驗證分析。在測試環境穩定的情況下,各個隨機項可認為是統計獨立的隨機過程,因此原子鐘的時域噪聲模型可表示為[13]:

(5)

基于時域的相位噪聲理論,Allan方差噪聲模型如下[14]:
(6)
式中:τ為取樣時間;h-2、h-1、h0、h1、h2為各噪聲系數;fh為頻率上限。在已知了5個隨機噪聲項在典型時間間隔下的Allan方差值之后,通過最小二乘法擬合Allan方差的雙對數曲線,從中可以求解出各個隨機項的系數[15-16],具體解算的系數結果如表1所示。

表1 ADEV計算的噪聲系數
由表1可知,5種噪聲類型中,調相閃爍噪聲的權重是最大的,即這種噪聲對于測量過程的貢獻是最大的,這也是Allan算法缺陷所至。現將表1計算中的5個頻率穩定度值用MDEV計算出的頻率穩定度代替,時間間隔不變,就可得到MDEV相對于ADEV在5種噪聲系數下的噪聲系數,見表2。

表2 MDEV計算的噪聲系數
從表1和表2的比較可以看出,無論是ADEV算法還是MDEV算法,在對頻率穩定度的評估方面,調相閃爍噪聲(α=1)的貢獻都是最大的。對于ADEV算法而言,h1系數的貢獻量相對于其他系數的權重更大。而利用MDEV解算得到的h1系數有明顯變小的情況。與其他噪聲系數的比例關系對比后不難發現,調相閃爍噪聲的作用仍為主導。也就是說,在頻率穩定度分析中,MDEV算法無法改變主要噪聲作用的趨勢,但會降低調相閃爍噪聲對頻率穩定度測量的影響。
4 結束語
針對原子鐘頻率穩定度的評估方法,本文提出了MDEV對于噪聲抑制的機理。試驗結果表明,在時域范圍內,短期頻率穩定度測量中的主要噪聲包括調頻白噪聲和調相閃爍噪聲。而MDEV對于調相閃爍噪聲的抑制效果明顯優于ADEV。對原子鐘進行遠程時間頻率溯源及傳遞中,MDEV更適用于頻率穩定度的評估。本文對實際的應用具有一定的價值。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00