自動化集裝箱碼頭自動導引車路徑沖突規避優化策略
2019-10-18 03:04:05章文俊韓曉龍
集裝箱化
2019年7期
章文俊 韓曉龍

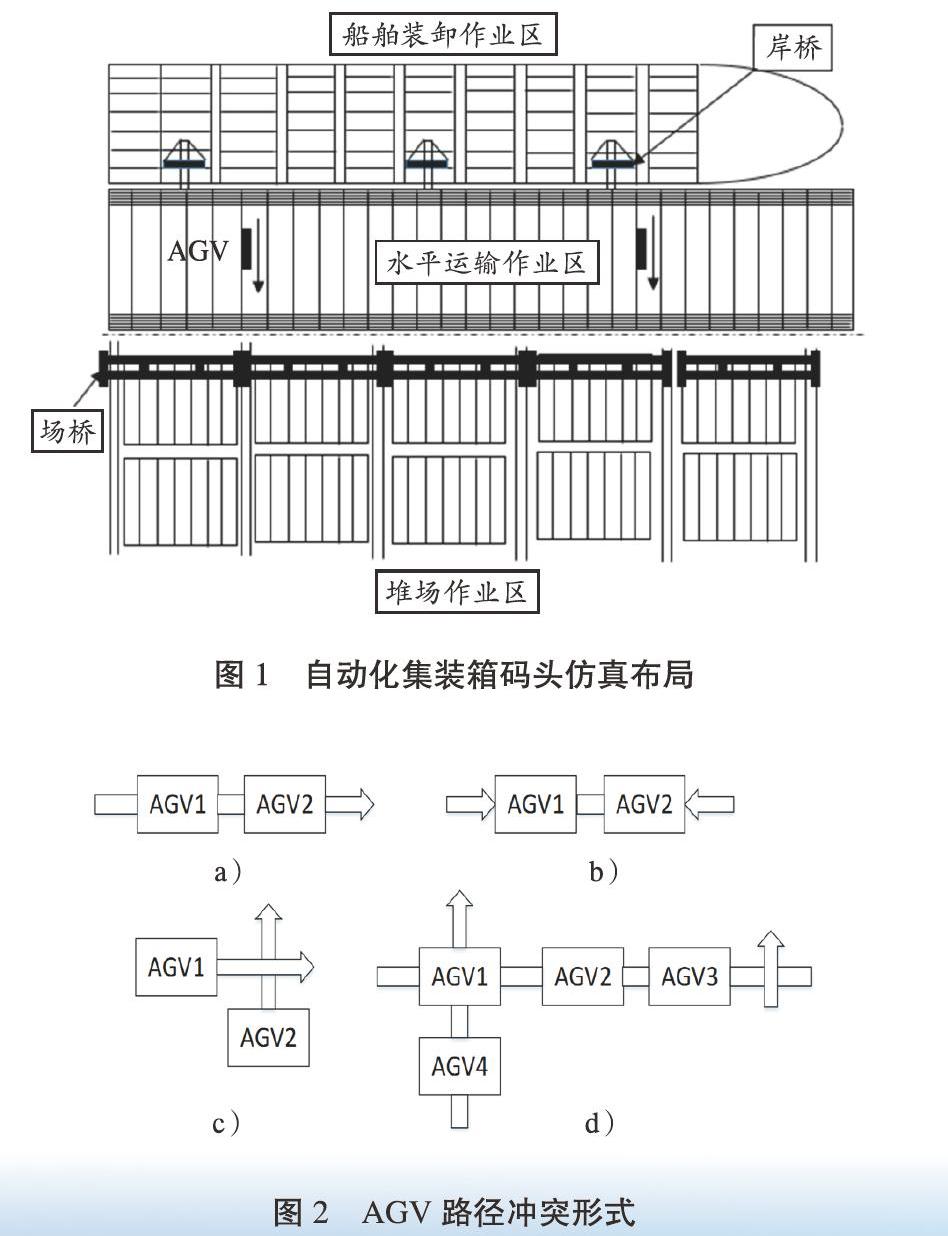
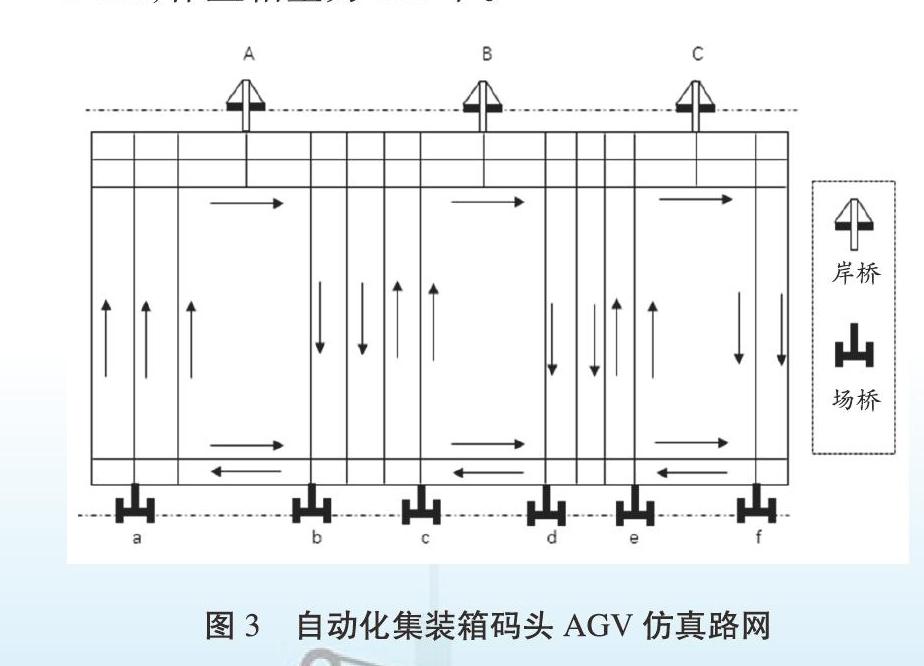
自動導引車(automated guided vehicle,AGV)是自動化集裝箱碼頭的主要運輸設備,用于在碼頭前沿與后方堆場之間水平運輸集裝箱。AGV的作業效率不僅受其自身性能的影響,而且受碼頭布局、行駛路徑和道路容量等因素的影響。在碼頭作業高峰期,隨著AGV行駛路徑的不斷重疊,可能會產生AGV路徑沖突問題,導致AGV作業效率下降。為了解決AGV路徑沖突問題,本文在傳統的速度控制策略的基礎上,提出基于道路容量的速度控制與路徑再規劃相結合的優化策略,并通過算例分析驗證優化策略的有效性和優越性。
1 研究背景
AGV路徑沖突規避涉及對AGV的實時控制,已有的研究成果包括:YANG等[1]提出一種用于作業設備協調和AGV路徑規劃的整體調度方案,建立以作業時間最短為目標的雙層規劃模型;柯冉絢等[2]建立以無效作業時間最短為目標的數學模型,并采用Netlogo仿真軟件驗證作業面調度模式的優越性;GRUNOW等[3]分析自動化集裝箱碼頭應用環境的特點及其對AGV調度問題的影響,并考慮多種解決方案;GHASEMZADEH等[4]提出網狀拓撲系統中AGV調度和路徑規劃算法;肖海寧等[5]針對單向導引路徑網絡中AGV碰撞和系統死鎖問題,提出一種規避環路死鎖搜索方法,定義單環路和多環路死鎖臨界狀態,并設計相應的死鎖控制策略;UMAR等[6]采用基于優先級的遺傳算法研究AGV路徑規劃問題,從而使AGV行駛時間最短;王佳溶等[7]提出基于改進后的兩階段控制策略和多目標的帶約束遺傳算法的控制策略,并……
登錄APP查看全文
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
故事大王(2016年7期)2016-09-22 17:30:08
通信電源技術(2016年1期)2016-04-16 04:57:26
中國工程咨詢(2016年4期)2016-02-14 07:28:28
兒童故事畫報(2013年3期)2013-06-24 05:40:30