
基于MATLAB圖像特征提取的零件位置識別
2019-10-19 15:26:30張?zhí)鞇?/span>安琳王宇茹
科技創(chuàng)新導(dǎo)報 2019年12期
關(guān)鍵詞:特征提取
張?zhí)鞇? 安琳 王宇茹
摘? ?要:本文針對機械加工零件在工業(yè)自動化生產(chǎn)線中零件位置識別問題,首先利用獲取的數(shù)據(jù),菱形的四個角點特征明顯,建立直角坐標系角點匹配模型,坐標系的原點為左上角頂點,然后利用MATLAB的corner函數(shù)計算散亂零件的四個角點坐標和標注位置的四個角點坐標,在機械手通過四個角點位置抓取零件,進行標準位置與散亂位置四個角點的隨機一一對應(yīng),將散亂位置的角點放到標準位置的對應(yīng)角點處。
關(guān)鍵詞:圖像特征識別? 特征提取? 角點? 形心
中圖分類號:TP39? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2019)04(c)-0133-02
在自動化生產(chǎn)線中,裝夾,包裝,分揀等均需要機器人準確識別出對象物體。機器人視覺就是這其中的核心技術(shù),機器視覺主要用計算機來模擬人的視覺功能,從客觀事物的圖像中提取信息,進行處理并加以理解,最終用于實際檢測、測量和控制。機器視覺技術(shù)最大的特點是速度快、信息量大、功能多。圖像識別技術(shù)的精、準、快尤為重要,識別出圖像后,對位置的計算也很重要,使機器人可以高效快速的對物體執(zhí)行操作[2]。
1? 模型介紹
本文獲取了部分零件數(shù)據(jù),零件形狀為接近菱形(正方形),在零件中央位置有三個圓。對零件進行特征提取,菱形的四個角點特征明顯,且確定四個角點坐標即可令機械手得知此零件的精準位置實施抓取。假設(shè)標準零件的坐標位置對于以圖片左上角為原點建立的坐標系而言是一致的。所以在本模型中我們以拍攝圖片的左上角即第一矩陣點坐標為原點,以矩陣的第一行為x軸,以矩陣的第一列為y軸建立直角坐標系。利用MATLAB自帶corner函數(shù)計算菱形四個角點坐標A(a1,a2),B(b1,b2),C(c1,c2),D(d1,d2),機械手可以根據(jù)四個角點坐標抓取零件,將未在標準位置上的零件移動到與標準位置角點一致的位置上。
2? 模型求解
在本模型中我們利用了MATLAB中自帶的corner函數(shù)對數(shù)據(jù)進行角點的求解。計算圖像中的角點首先要計算出它的灰度變化率。其函數(shù)及展開式如下:
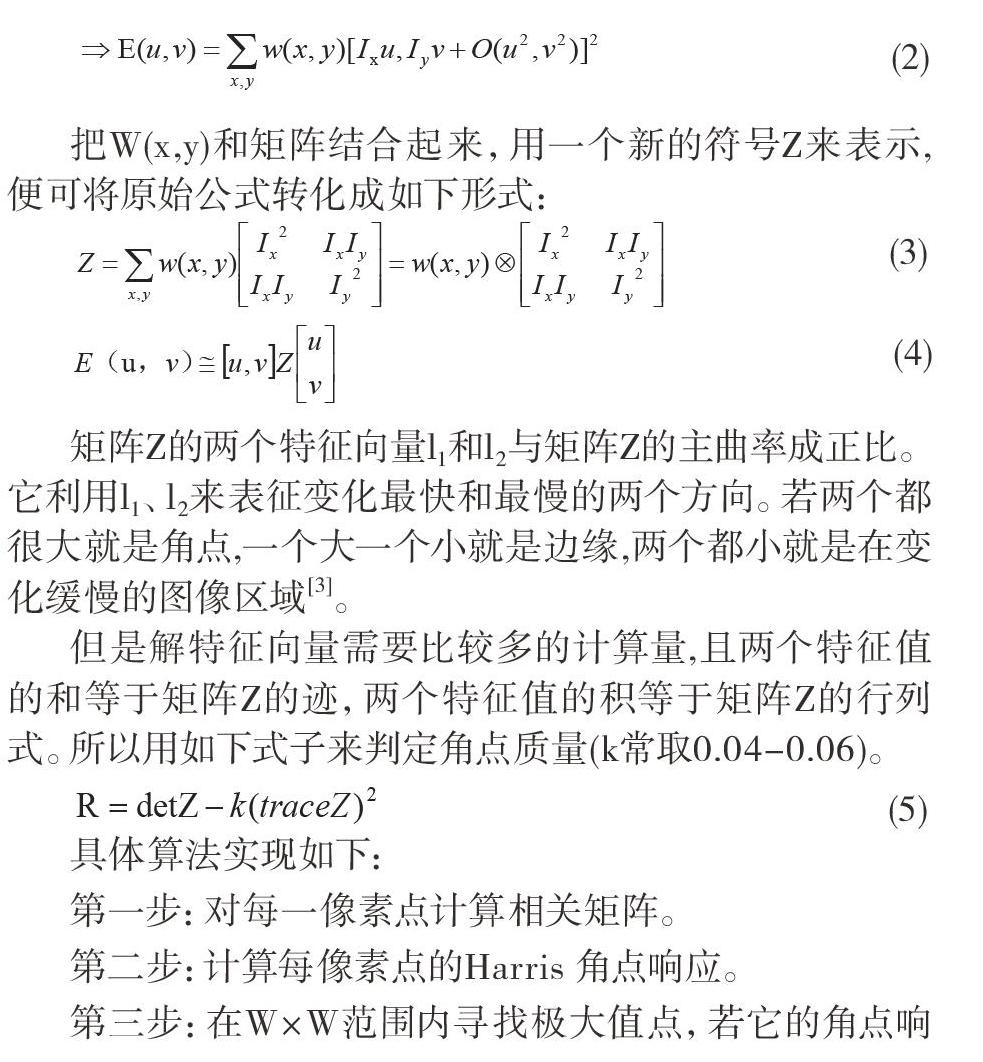
把W(x,y)和矩陣結(jié)合起來,用一個新的符號Z來表示,便可將原始公式轉(zhuǎn)化成如下形式:
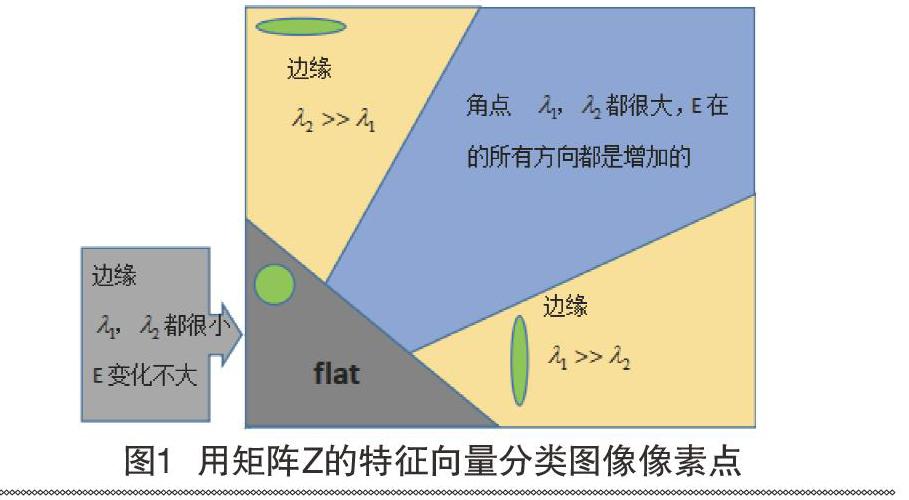
矩陣Z的兩個特征向量l1和l2與矩陣Z的主曲率成正比。它利用l1、l2來表征變化最快和最慢的兩個方向。若兩個都很大就是角點,一個大一個小就是邊緣,兩個都小就是在變化緩慢的圖像區(qū)域[3]。
但是解特征向量需要比較多的計算量,且兩個特征值的和等于矩陣Z的跡,兩個特征值的積等于矩陣Z的行列式。所以用如下式子來判定角點質(zhì)量(k常取0.04-0.06)。
具體算法實現(xiàn)如下:
第一步:對每一像素點計算相關(guān)矩陣。
第二步:計算每像素點的Harris 角點響應(yīng)。
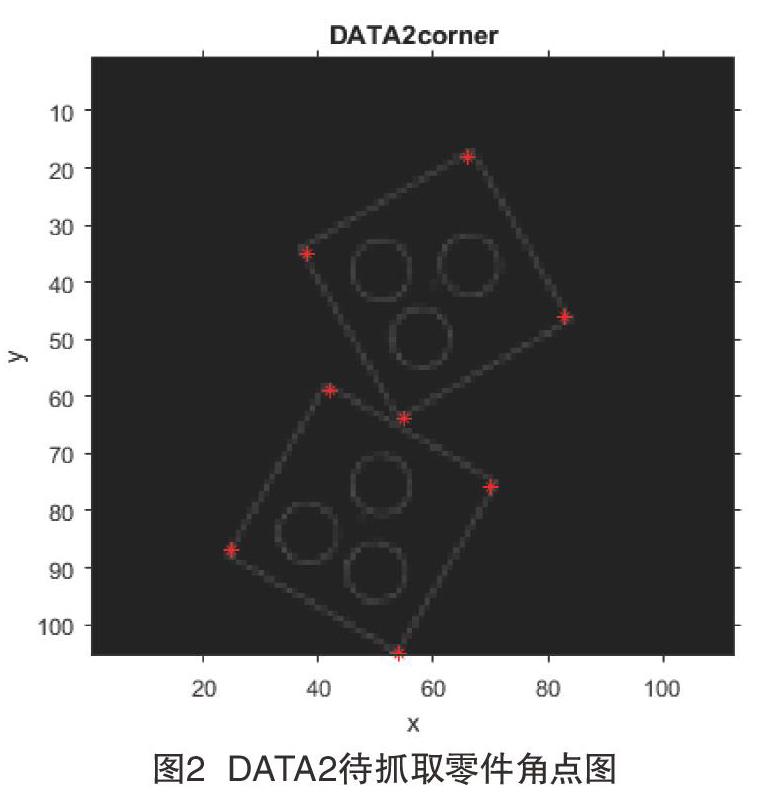
第三步:在W×W范圍內(nèi)尋找極大值點,若它的角點響應(yīng)大于閥值,則視為角點:根據(jù)以上算法,分別求出的標準零件與待抓取零件角點以及其坐標。
3? 結(jié)語
可得到帶抓取零件角點坐標A1(25,87),B1(42,49),C1(54,105),D1(70,76)以及標準位置角點坐標為A(38,35),B(66,18),C(55,64),D(83,46),再根據(jù)得到的待抓取零件角點的四個坐標,機械手即可移動到指定位置抓取。為了在運算過程中減少時間,我們對原有圖進行了縮放,因此待抓取零件和標準零件角點位置應(yīng)擴大為原來的5倍。機械手可以根據(jù)四個角點坐標抓取零件,將其放置標準位置零件的角點相同的位置上。
參考文獻
[1] 國務(wù)院關(guān)于印發(fā)《中國制造2025》的通知[A].中國農(nóng)機工業(yè)協(xié)會風(fēng)能設(shè)備分會《風(fēng)能產(chǎn)業(yè)》(2015年第8期)[C].2015:14.
[2] 百度百科.“機器視覺技術(shù)”詞條[EB/OL].https://baike.baidu.com/item/機器視覺技術(shù)/5685545.
[3] 張麗鵬,顧寄南,丁衛(wèi).基于MATLAB圖像處理的齒輪中心定位[J].工具技術(shù),2016,50(12):86-88.
猜你喜歡
艦船科學(xué)技術(shù)(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學(xué)報(2017年7期)2017-04-18 13:41:09
自動化學(xué)報(2017年11期)2017-04-04 02:52:58
中國生物醫(yī)學(xué)工程學(xué)報(2017年6期)2017-02-10 05:11:45
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49
