速度閉環控制在提升電動車坡道駕駛性的應用
2019-10-20 03:58:43肖小城王春麗章友京倪紹勇沙文瀚
汽車科技 2019年5期
肖小城 王春麗 章友京 倪紹勇 沙文瀚
摘要:本文提出了一種通過控制速度閉環提升純電動汽車坡道駕駛性的方法。該方法解決未配備液壓輔助功能的電動車在坡道上溜坡的問題、通過對車輛狀態的檢測,利用電機低速大扭矩的特點,控制電機保持零轉速,可以實現電動汽車的坡道輔助和自動駐車功能,通過此方法可以改善電動汽車坡道的駕駛性,經過實車驗證,此方法效果明顯。
關鍵詞:電動汽車;坡道駕駛性
中圖分類號:U469.72 文獻標識碼:A 文章編號:1005-2550(2019)05-0060-05
肖小城
肖小城,畢業于鄭州大學,檢測技術與自動化專業碩士研究生,現工作于奇瑞新能源汽車技術有限公司,整車控制策略主管師,負責純電動汽車整車控制策略開發和驗證。目前已經發表論文4篇,獲得專利10余篇。
1 前言
電動汽車(Electric Vehicle,EV)由于其在環保方面具有突出的優勢,越來越受到汽車行業的青睞。電動汽車核心電驅動系統具有低速大扭矩、無怠速的特點,與傳統內燃機存在很大的差異,通過對電驅動系統零轉速的精確控制,可以實現電動車輛的坡道輔助和自動駐車的功能。所謂零轉速是指,通過控制電驅動系統的扭矩維持電機轉速為零。傳統燃油車實現坡道輔助的功能基本是通過對液壓系統的保壓,制動車輪的方式實現。孫延[1]基于EPB系統對坡道輔助的起步策略進行研究,通過仿真驗證了動態輸入參數方式的有效性;沈忱[2]等基于ESC系統設計了汽車坡道起步輔助功能的策略,并進行實車標定驗證有效性;王洪偉[3],提出氣壓式電子駐車制動系統,通過控制制動氣室內的壓力,推動推桿保持制動車輪,實現駐車目的;胡建軍[4]等對起步扭矩控制中對溜坡扭矩進行了考慮,但未實現閉環的控制。本文提出的方案完全不依賴于液壓系統的保壓,而是控制電驅動系統的零轉速實現起步輔助,提高坡道的駕駛性,同時降低成本。
2 純電動車坡道動力學分析及零轉速控制架構
2.1 純電動車的坡道受力分析
為了提升坡道的駕駛性,主要為了解決電動車坡道后溜車,對電動車在坡道上的受力分析情況如圖1所示:
圖1可知,電動車在坡道上靜止將要起步時,受到的力有驅動力Ft,坡度阻力Fr,車輛起步瞬間受到的滾阻,空氣阻力等Fao
Ft=T×i×η/r;(1)
Fr=G×sinθ;(2)
Fa=G×f×cosθ+Cd×A×V×V/21.15(3)
其中,T為驅動系統輸出扭矩,i為傳動系統速比,η為傳動系統的效率,r為驅動輪半徑;G為車輛重力,θ為坡道值,f為滾動阻力系數,Cd為空氣阻力系數,A為迎風面積,V為車速;為了實現坡道起步輔助的目標,需要控制電驅動系統輸出扭矩T滿足Ft=Fr+Fa的關系,由于車輛駐在坡道上,車速為零,所以可以忽略Fa,即Ft=Fr;由電驅動系統的驅動扭矩平衡坡道阻力[5]。
2.2 零轉速控制架構
在2.1中已經分析了電動車在坡道上的受力情況,為了實現坡道輔助或者自動駐車的目的,需要精確的控制車輛在坡道上駐車。本文提到的零轉速控制以車輛控制器(VCU)為控制核心,同時以電驅動系統(MCU)作為檢測和執行單元,輔佐坡道傳感器作為坡道大小探測,為精確的零轉速控制提供預控制扭矩,同時VCU還需要采集檔位,油門,制動等信號來判斷駕駛員意圖,實現坡道輔助或者自動駐車功能的激活,通過儀表模塊(ICM)實現人機交互。圖2為零轉速控制系統架構。
VCU以lOms為周期對油門,檔位,制動,坡度,駐車開關的輸入狀態進行采集,作為坡道起步輔助功能激活的判斷條件,同時以lms為周期的任務調度與MCU之間進行扭矩的控制交互,保證控制的實時性;VCU與ICM之間以500ms進行周期性信息顯示,主要人機交互內容包括:輔助功能預激活提示,輔助功能激活,輔助功能故障等重要信息。零轉速控制以PID控制為核心,以坡度值計算預控制扭矩,以車輛半載作為標定目標車輛,通過標定完成初始值設定。當坡道輔助功能激活時,以一定梯度加載預控制扭矩保證車輛扭矩平順性,以目標轉速為零,進行PID控制;當坡道輔助功能退出時,以當前控制扭矩為初始值,以一定梯度進行扭矩變化,保證扭矩加減載的平順性。控制框圖如圖3所示。
3 坡道起步輔助控制實現
3.1 坡道輔助功能實現
坡道輔助(Hill Assistance Control,HAC)功能在傳統燃油車上的實現是:車輛依靠液壓制動停穩在坡道上后,通過液壓系統的保壓,維持3-5秒時間,給駕駛員足夠時間實現倒腳。3-5秒后,液壓釋放;或者駕駛員請求驅動力大于液壓制動力,液壓自動釋放,保證在坡道上駕駛性。本文以在研A000級電動車為控制對象,對速度閉環控制優化坡道駕駛性進行有效性驗證。車輛基本信息:整備質量1015kg,電機峰值扭矩125Nm,峰值功率33kw,電池容量32kwh,車輛配置ABS系統,但無液壓輔助功能。通過零轉速控制HAC功能實現的條件:
a).車輛停穩;
b).檔位為驅動檔位(D/R);
c).驅動系統準備就緒;
d).油門小于閾值2%;
e).坡道輔助開關開啟;
f).坡度值大于閾值;
上述條件同時滿足時,激活坡道輔助功能。根據制動踏板行程,對控制扭矩進行系數限制,防止制動完全踏下情況下,加載過大扭矩出現竄車現象,控制系數與制動踏板行程關系如圖4所示。針對文中A000級電動車標定的預控制扭矩如圖5所示。
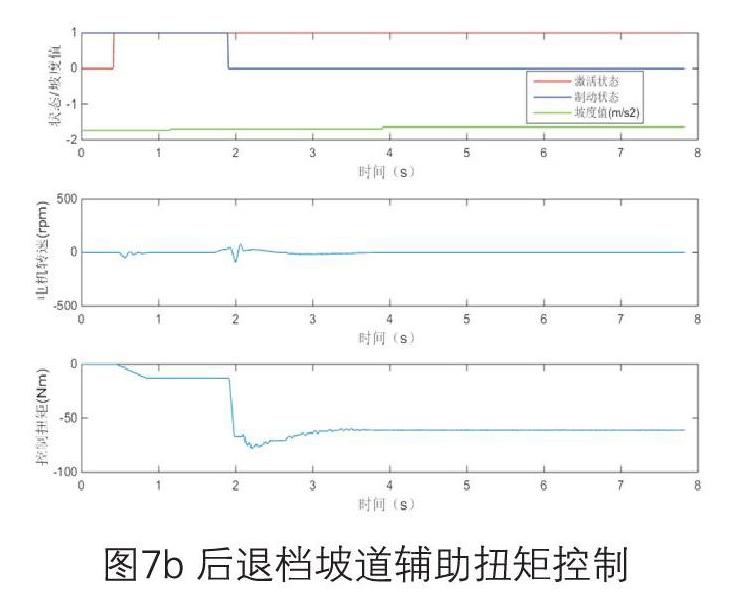
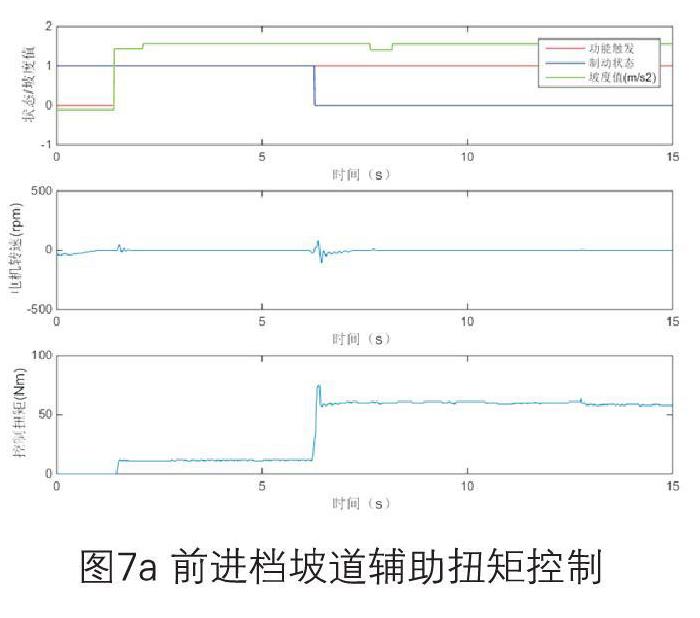
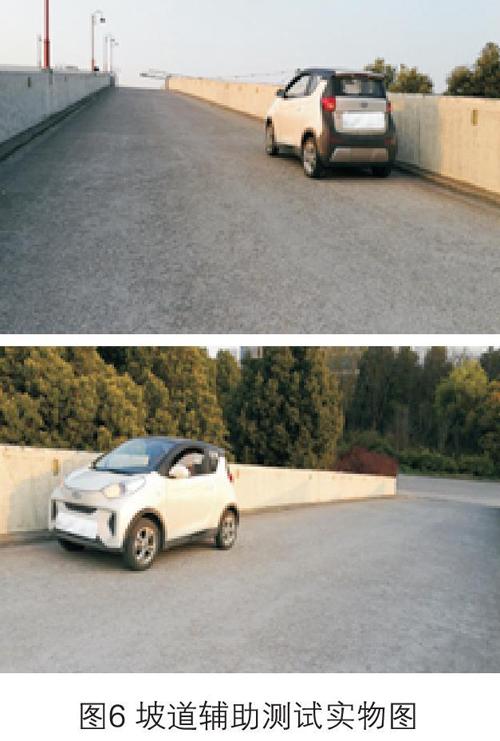
以8°坡為實例,對加載扭矩進行控制,如圖6,坡道輔助測試實物圖。圖7a為前進檔坡道輔助扭矩控制,圖7b為后退檔坡道輔助扭矩控制。從圖中可以得知,在坡道上車輛停穩后,坡道輔助功能觸發,制動踏板踏下后,控制扭矩被限制,當制動踏板釋放后,結合目標轉速進行反饋控制,預控制扭矩和PID控制可快速讓電機轉速控制在目標值,轉速波動±50rpm,結合實際整車表現,松開制動后,整車可停駐在坡道上,不出現后溜,對提升駕駛性有明顯的提升。
在坡道輔助功能激活后,下列條件:
f).坡道輔助開關關閉;
g).檔位切換到空檔;
h).驅動系統不可用;
I).駕駛員通過油門請求扭矩大于輔助扭矩同時油門開度大于設定閾值4%;
k).電驅動系統或者電池系統故障或者坡度傳感器故障;
滿足上述條件之一,退出坡道輔助功能。設定兩種退出坡道輔助功能工況。第一,通過檔位退出坡道輔助功能;第二,驅動扭矩大于輔助扭矩,測試兩種工況下扭矩控制與轉速波動情況。如圖8a,掛人空檔退出坡道輔助功能,檔位掛人空檔后,立刻退出坡道輔助功能,為了防止扭矩突然卸載導致車輛出現強烈沖擊,通過對零轉速控制時的扭矩進行接管,按照設定的梯度進行扭矩的遞減直到為零,保證退出時的平順性。從實驗數據可知:扭矩經過約600ms后變為零,在卸載過程中,轉速的波動約為±30rpm,從整車表現來看,平順性良好;如圖8b,加大油門開度,當驅動扭矩大于零轉速控制扭矩后,退出坡道輔助功能,此時,控制扭矩跟隨油門請求扭矩,保持加載的平順性,從實驗數據可看出,起步平順,轉速波動大約為±25rpm。
3.2 自動駐車功能實現
自動駐車(AUTOHOLD)在傳統車上實現是通過EPB/ESP系統的保壓,直到駕駛員請求驅動力大于駐車制動力,自動釋放,車輛平穩起步。在本文中通過速度閉環的控制也可以實現自動駐車的功能。自動駐車功能觸發條件為:
a).檔位為D檔;
b).自動駐車開關開啟;
c).通過制動將車輛停穩保持2秒;
d).驅動系統準備就緒;
上述條件全部滿足時觸發自動駐車功能,此時通過圖3的控制框圖以電驅動系統零轉速作為控制目標,通過扭矩控制,實現車輛駐車的目的。當以下任一條件滿足時,退出自動駐車功能:
e).檔位為非D檔:
f).驅動系統不可用;
g).駕駛員通過油門請求扭矩大于輔助扭矩同時油門開度大于設定閾值4%;
h).電驅動系統或者電池系統故障或者坡度傳感器故障;
I).自動駐車開關關閉;
通過對以下兩個典型工況:平路上開啟自動駐車;8°坡道開啟自動駐車,驗證自動駐車功能的有效性。圖9a為平路上自動駐車扭矩控制,圖9b為坡道上自動駐車扭矩控制。通過數據分析可看出:以電機的零轉速作為控制目標,可以實現自動駐車的功能,在平路上,滿足上述自動駐車條件后,車輛平穩的實現了駐車,當駕駛員踏下油門后,請求扭矩大于駐車扭矩,車輛平穩起步;在坡道上時,條件滿足后,自動駐車功能激活,由于制動踏板踏下,限制駐車扭矩,當完全松開后,駐車扭矩增加,扭矩快速調節,轉速出現很小波動(±80rpm),隨后駕駛員請求扭矩,加載平順,大于駐車扭矩后,實現平穩起步。
4 結論
本論文重點驗證了通過速度閉環的思想控制電機速度實現坡道輔助和自動駐車的功能,通過實車驗證,該方案可以用于解決未配置液壓輔助功能的純電動車坡道溜坡的問題,實驗數據表明:方法有效,且無需對系統進行特殊的改造,結構簡單,成本低,具有一定的工程實踐價值。在該方法實施過程中,需要考慮電驅動系統在零轉速控制狀態下的散熱問題,在實車開發過程中可與車輛的熱管理系統聯動保證驅動系統的正常工作。
參考文獻:
[1]孫延.EPB電控駐車制動系統坡道輔助起步控制策略研究[A].第14屆國際汽車交通安全論壇[C],2017,長沙,230-239.
[2]沈忱,劉繼峰等.基于ESC系統的坡道起步輔助功能研究[A].中國汽車工程學會年會論文集[C],2015,810-813.
[3]王洪偉,王俊偉,章健國.自動駐車制動控制系統在商用車的設計研究[J].汽車實用技術,2017(21):76-81.
[4]胡建軍,杜瑞,吉毅等.純電動汽車起步控制策略[J].重慶大學學報,2013,36(8):19-25.
[5]余志生.汽車理論[M].北京:機械工業出版,2009,15-18.
基金項目:安徽省科技重大專項(16030901035)奇瑞全鋁車身AO級純電動SUV研發及產業化資助
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20