基于MATLAB的六軸工業(yè)機(jī)械手運(yùn)動(dòng)學(xué)分析與仿真研究
2019-10-21 01:59:32李雨健
中國(guó)電氣工程學(xué)報(bào) 2019年5期
摘要:以六軸工業(yè)機(jī)械手為研究對(duì)象,應(yīng)用標(biāo)準(zhǔn)的參數(shù)法建立機(jī)器人各桿件坐標(biāo)系,并根據(jù)坐標(biāo)系之間的齊次變換關(guān)系建立運(yùn)動(dòng)學(xué)方程,從而得出正解。該機(jī)械手后3個(gè)關(guān)節(jié)為旋轉(zhuǎn)關(guān)節(jié),且在腕中心點(diǎn)解耦,故用代數(shù)法計(jì)算得出逆解。基于MATLAB Robotics Toolbox工具箱,構(gòu)建該機(jī)械手的三維模型圖,依據(jù)關(guān)節(jié)空間、笛卡爾空間的轉(zhuǎn)換關(guān)系,應(yīng)用FKINE、IKINE函數(shù)對(duì)該機(jī)械手進(jìn)行正、逆運(yùn)動(dòng)學(xué)問(wèn)題進(jìn)行仿真。仿真結(jié)果驗(yàn)證了所開(kāi)發(fā)的正逆運(yùn)動(dòng)學(xué)算法的正確性且所建模型能快速地進(jìn)行正逆解求解,有效地獲得機(jī)器人的關(guān)節(jié)角、位姿等運(yùn)動(dòng)參數(shù),這對(duì)于進(jìn)一步系統(tǒng)研究該六軸工業(yè)機(jī)器人的軌跡規(guī)劃提供了數(shù)據(jù)保障和理論分析依據(jù)。
關(guān)鍵詞:六軸工業(yè)機(jī)械手 MATLAB 運(yùn)動(dòng)學(xué) 機(jī)器人工具箱
0.引言
工業(yè)機(jī)器人是一種自動(dòng)的、位置可控的、具有編程能力的多功能、多自由度機(jī)械手,可用來(lái)搬運(yùn)、碼垛等[1]。隨著“中國(guó)制造”向“中國(guó)智造”升級(jí),六軸工業(yè)機(jī)器人逐漸取代產(chǎn)線(xiàn)工人被應(yīng)用到生產(chǎn)中,解決勞動(dòng)力短缺和勞動(dòng)力成本增長(zhǎng)問(wèn)題,尤其是在珠三角制造行業(yè)中大規(guī)模應(yīng)用,諸如家電、汽配、電子信息、食品等諸多行業(yè)。但與此同時(shí),為了滿(mǎn)足更加復(fù)雜的產(chǎn)線(xiàn)作業(yè)和更加快速的生產(chǎn)節(jié)奏,對(duì)其性能指標(biāo)的要求也越來(lái)越高,因此,對(duì)機(jī)器人的運(yùn)動(dòng)學(xué)進(jìn)行深入研究從而提高精度等關(guān)鍵指標(biāo),在生產(chǎn)實(shí)踐中有極其重大的意義[2]。
針對(duì)六自由度串聯(lián)工業(yè)機(jī)器人,本文分析其運(yùn)動(dòng)學(xué)正逆解問(wèn)題,實(shí)質(zhì)是實(shí)現(xiàn)關(guān)節(jié)空間下的關(guān)節(jié)角和笛卡爾空間下的位姿轉(zhuǎn)換。在MATLAB Robotics toolbox中,先用Drivebot()函數(shù)構(gòu)建機(jī)器人模型,再應(yīng)用FKINE、IKINE函數(shù)對(duì)該機(jī)械手進(jìn)行正、逆運(yùn)動(dòng)學(xué)問(wèn)題仿真分析,從而對(duì)開(kāi)發(fā)的正逆運(yùn)動(dòng)學(xué)算法進(jìn)行仿真驗(yàn)證[3]。
1.運(yùn)動(dòng)學(xué)模型
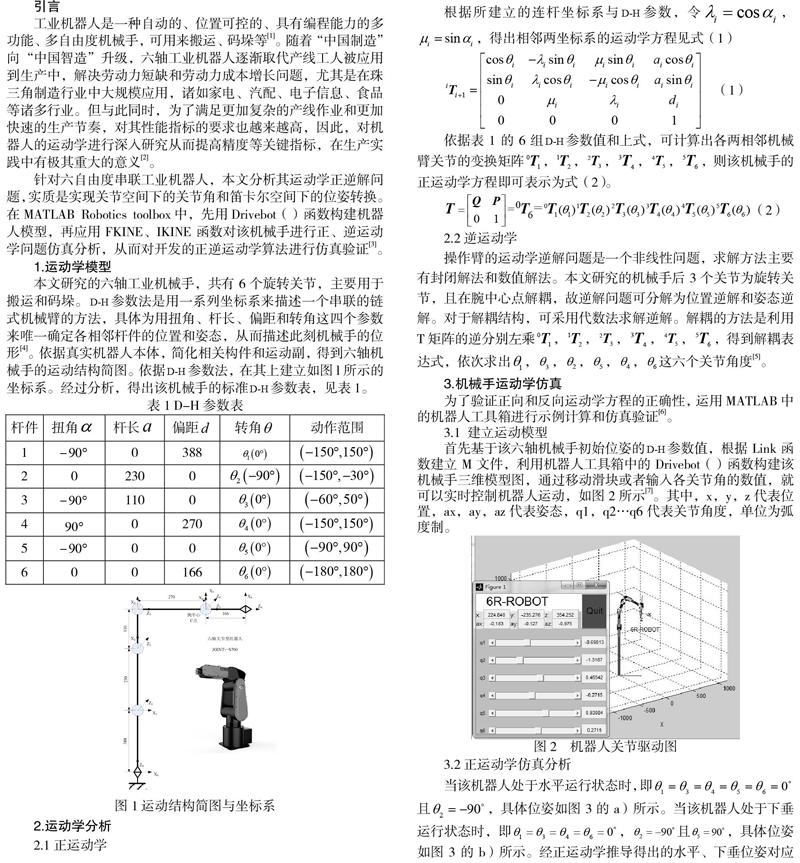
本文研究的六軸工業(yè)機(jī)械手,共有6個(gè)旋轉(zhuǎn)關(guān)節(jié),主要用于搬運(yùn)和碼垛。參數(shù)法是用一系列坐標(biāo)系來(lái)描述一個(gè)串聯(lián)的鏈?zhǔn)綑C(jī)械臂的方法,具體為用扭角、桿長(zhǎng)、偏距和轉(zhuǎn)角這四個(gè)參數(shù)來(lái)唯一確定各相鄰桿件的位置和姿態(tài),從而描述此刻機(jī)械手的位形[4]。依據(jù)真實(shí)機(jī)器人本體,簡(jiǎn)化相關(guān)構(gòu)件和運(yùn)動(dòng)副,得到六軸機(jī)械手的運(yùn)動(dòng)結(jié)構(gòu)簡(jiǎn)圖。依據(jù)參數(shù)法,在其上建立如圖l所示的坐標(biāo)系。經(jīng)過(guò)分析,得出該機(jī)械手的標(biāo)準(zhǔn)參數(shù)表,見(jiàn)表1。
2.運(yùn)動(dòng)學(xué)分析
2.1正運(yùn)動(dòng)學(xué)
2.2逆運(yùn)動(dòng)學(xué)
3.機(jī)械手運(yùn)動(dòng)學(xué)仿真
為了驗(yàn)證正向和反向運(yùn)動(dòng)學(xué)方程的正確性,運(yùn)用MATLAB中的機(jī)器人工具箱進(jìn)行示例計(jì)算和仿真驗(yàn)證[6]。
3.1 建立運(yùn)動(dòng)模型
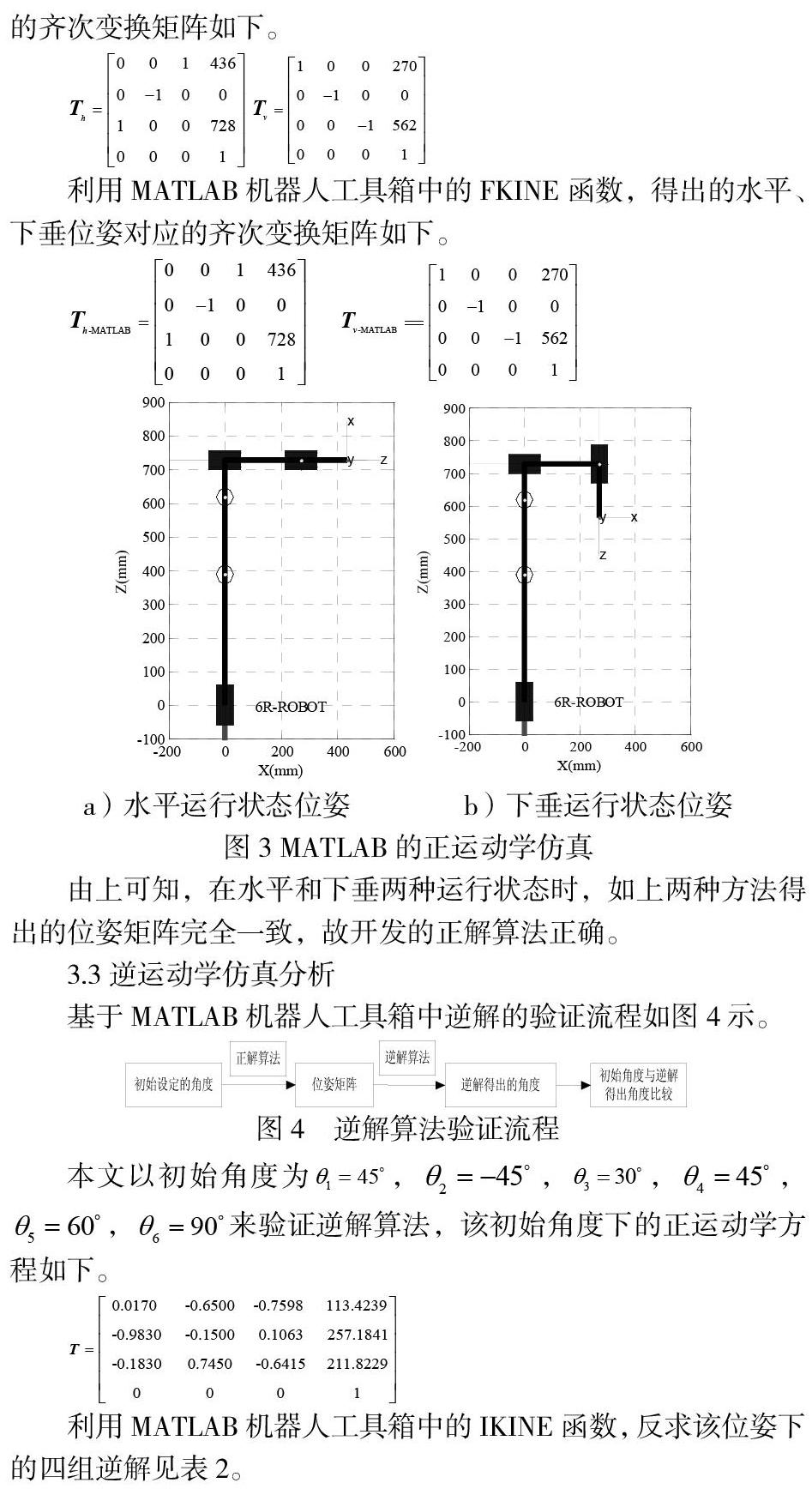
首先基于該六軸機(jī)械手初始位姿的參數(shù)值,根據(jù)Link函數(shù)建立M文件,利用機(jī)器人工具箱中的Drivebot()函數(shù)構(gòu)建該機(jī)械手三維模型圖,通過(guò)移動(dòng)滑塊或者輸入各關(guān)節(jié)角的數(shù)值,就可以實(shí)時(shí)控制機(jī)器人運(yùn)動(dòng),如圖2所示[7]。其中, x,y,z代表位置,ax,ay,az代表姿態(tài),q1,q2…q6代表關(guān)節(jié)角度,單位為弧度制。
3.2正運(yùn)動(dòng)學(xué)仿真分析
當(dāng)該機(jī)器人處于水平運(yùn)行狀態(tài)時(shí),即且,具體位姿如圖3的a)所示。當(dāng)該機(jī)器人處于下垂運(yùn)行狀態(tài)時(shí),即,且,具體位姿如圖3的b)所示。經(jīng)正運(yùn)動(dòng)學(xué)推導(dǎo)得出的水平、下垂位姿對(duì)應(yīng)的齊次變換矩陣如下。
利用MATLAB機(jī)器人工具箱中的FKINE函數(shù),得出的水平、下垂位姿對(duì)應(yīng)的齊次變換矩陣如下。
由上可知,在水平和下垂兩種運(yùn)行狀態(tài)時(shí),如上兩種方法得出的位姿矩陣完全一致,故開(kāi)發(fā)的正解算法正確。
3.3逆運(yùn)動(dòng)學(xué)仿真分析
基于MATLAB機(jī)器人工具箱中逆解的驗(yàn)證流程如圖4示。
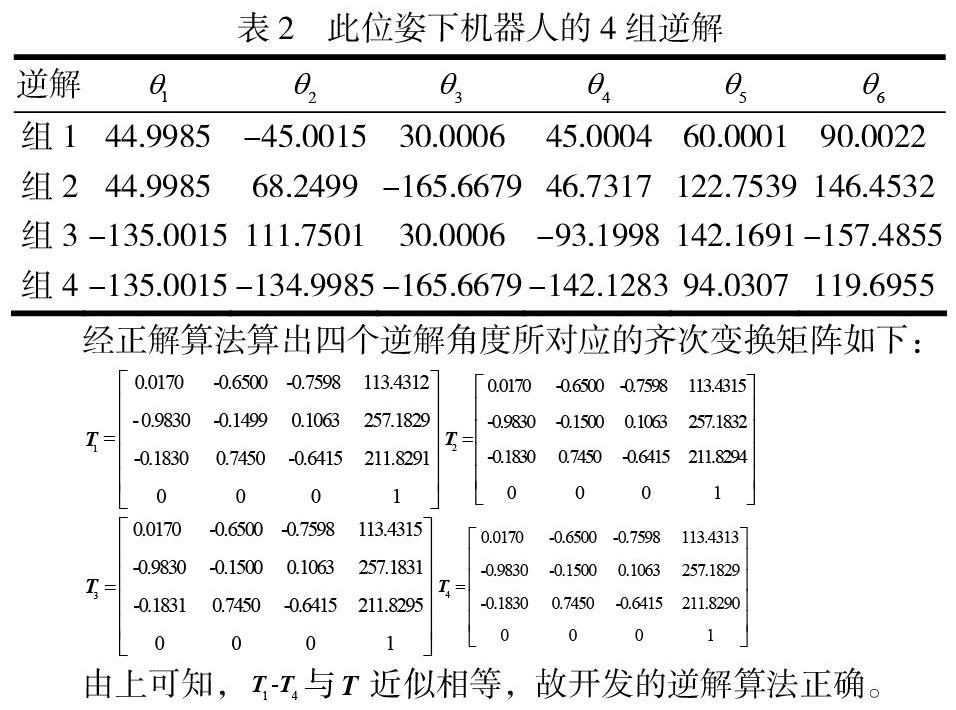
利用MATLAB機(jī)器人工具箱中的IKINE函數(shù),反求該位姿下的四組逆解見(jiàn)表2。
經(jīng)正解算法算出四個(gè)逆解角度所對(duì)應(yīng)的齊次變換矩陣如下:
由上可知,與近似相等,故開(kāi)發(fā)的逆解算法正確。
4.結(jié)論
針對(duì)六軸工業(yè)機(jī)械手,先簡(jiǎn)化模型得出其運(yùn)動(dòng)結(jié)構(gòu)簡(jiǎn)圖,再利用標(biāo)準(zhǔn)的參數(shù)法對(duì)該六軸工業(yè)機(jī)械手進(jìn)行運(yùn)動(dòng)學(xué)建模,得出正逆運(yùn)動(dòng)學(xué)算法。基于MATLAB中的機(jī)器人工具箱,編寫(xiě)機(jī)器人的程序語(yǔ)句,展示機(jī)器人關(guān)節(jié)角度驅(qū)動(dòng)的效果圖,驗(yàn)證了所開(kāi)發(fā)的機(jī)器人正逆運(yùn)動(dòng)學(xué)算法,從而為后續(xù)的機(jī)器人的軌跡規(guī)劃研究提供相關(guān)的數(shù)據(jù)保障。
參考文獻(xiàn)
[1] 姜倩倩. 板簧搬運(yùn)機(jī)械手控制系統(tǒng)及軌跡規(guī)劃研究[D]. 山東理工大學(xué), 2012.
[2]劉云輝, 韓玉勇. 魯南地區(qū)機(jī)械行業(yè)“機(jī)器換人”轉(zhuǎn)型升級(jí)應(yīng)用研究[J]. 現(xiàn)代制造技術(shù)與裝備, 2016, 3(8):153-155.
[3]左富勇, 胡小平, 謝珂, et al. 基于MATLAB Robotics工具箱的SCARA機(jī)器人軌跡規(guī)劃與仿真[J]. 湖南科技大學(xué)學(xué)報(bào)(自然科學(xué)版), 2012, 27(2):41-44.
[4]楊曉鈞.工業(yè)機(jī)器人技術(shù)[M].哈爾濱工業(yè)大學(xué)出版社,2015.
[5] 李雨健. 六軸碼垛機(jī)器人的軌跡規(guī)劃與關(guān)節(jié)摩擦補(bǔ)償研究[D].哈爾濱工業(yè)大學(xué),2017.
[6] 王曉強(qiáng), 王帥軍, 劉建亭. 基于MATLAB的IRB2400工業(yè)機(jī)器人運(yùn)動(dòng)學(xué)分析[J]. 機(jī)床與液壓, 2014(3):54-57.
[7] 李啟才. 基于共形幾何代數(shù)的可重構(gòu)機(jī)器人運(yùn)動(dòng)學(xué)研究[D]. 北方工業(yè)大學(xué), 2015.
