DCS系統設計及先進控制應用探討
2019-10-21 08:05:17王興勤
中國電氣工程學報 2019年6期
王興勤

摘? 要:DCS系統廣泛應用于工業控制領域,隨著工業控制對象的日益復雜,對控制技術提出了更高的要求。本文對DCS 系統結構設計進行深入的分析,并對如何把先進控制技術應用到DCS系統展開了探討。
關鍵詞:DCS控制系統;先進控制技術;控制算法
DCS是分布式控制系統的英語簡稱,結合計算機控制技術和通信技術,可以對生產裝置進行分散式控制和集中管理,最早由美國在上世紀70年代提出。隨著控制技術的不斷發展,數字化儀表得到了廣泛的應用,可以采用現場總線技術進行互聯通信,控制主站功能控制模塊分布于每個數字儀表中,通過組態而形成完整的控制回路,可以更好地實現分散控制。隨著DCS控制系統的不斷應用,需要把先進控制技術應用到DCS系統中來,從而對控制功能進行完善,建立起PID自整定控制模塊,充分發揮出DCS控制系統的作用。
1 DCS 系統結構設計
1.1現場控制站設計
現場控制站是可以獨立實現控制功能的計算機控制系統 ,可以實現過程控制,現場控制場主要由機柜、供電電源、模擬量通道及主控單元構成。
現場站的機柜采用多層機架結構方式,可以用來安裝電源和控制模塊,柜體外殼體采用金屬材料制成,柜體需要具備良好的接地,從而保證柜體內設備可以避免受到外部電磁干擾,機柜的接地電阻不得于大于4歐。柜體的設備運行功率較大, 需要進行通風散熱設計,為了避免灰塵進入,需要采用正壓送風方式。
供電電源可能保證現場控制站正常運行,需要要用冗余設計,采用雙相交流電進行供電,如果附近有大功率用電設備,還應該應用隔離變壓器,避免出現共模干擾問題。如果電壓波動較大,可以配置電子調壓器,如果對于供電可靠性要求較高,可以采用不間斷供電電源。
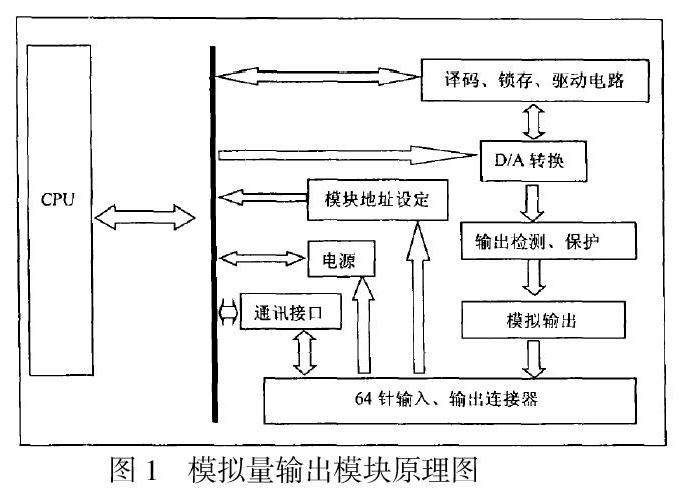
輸入輸出接口需要控制系統建立起模擬量、開關量和脈沖信號的通道。模擬量輸入通道可以把生產裝置的運行信號,比如,溫度、壓力、流量和液位等信號采集進行來,通過模擬量處理之后轉變為控制系統可以識別的數字信號。輸入的模擬量信號有0-5V、0-10V電壓、0-20mA、4-20mA電流信號。模擬量輸入通道主要由接線端子、信號調理單元、模數轉換模塊等構成,具體的原理見圖1所示。
模擬量輸出通道,根據設計要求來選擇輸出信號的種類,從而控制執行機構的動作。輸入出信號有4-20mA、0-5V和0-10V等。輸入的信號用來驅動電機轉速、執行機構的行程或運轉角度,模擬量輸出模塊的原理如圖2所示。
現場控制總站的模擬量輸出通道主要數模轉換模塊、輸出接電端子等構成,隨著集成電子技術的發展,輸出模塊通道通過集成電路來形成控制信號,利用數字鎖存的方式來保證輸出值,避免隨著時間的變化而出現衰減。
而開關量輸入通道主要用來監測限位開關、繼電器觸點的開斷狀態,輸入的開關量信號會存儲到數字寄存器內,控制系統通過數據采集程序來獲取到具體的開關狀態。輸出信號主要用于控制啟動、停止,驅動閥門進行動作,或者生成報警信號。
1.2主控單元
現場控制器的主控單元主要由CPU控制器和數據存儲器構成,CPU控制器可以根據控制規模的大小和精度要求來選擇位數,現在最高的CPU位數達到64位,可以有效地提升運算速度和處理效率,可以把各種控制程序下載到存儲器中,通過CPU運算輸入控制信號。存儲器主要用于保存生產現場的運行數據,RAM存儲器可以為實時數據存儲和計算的中間變量提供空間,用戶在組態界面中修改的參數出存儲于RAM中。
2先進控制技術在DCS中的應用
先進控制技術把數學分析模型作為基礎,充分利用微處理器的運算能力,是一種比傳統PID控制效果好的技術,可以提高企業的生產效率,可以用來處理復雜的工業控制要求。
2.1傳統PID控制方法和結構
PID控制器是工控領域應用最為可靠的技術,數字技術的不斷發展,很多控制程序和算法都離不開PID控制技術,還具備著較高的生命力。為了取得理想的控制效果,需要設定好比例常數、微分和積分時間,根據控制對象的特性,使控制性能和控制對象實現很好的配合,從而實現最優的控制效果。但控制參數設定的不合理,處理器性能無論怎樣先進,也無法達到理想的控制效果。工業控制過程中存在著很多不確定性,可能使控制模型產生變化,原來所設定的參數無法滿足控制要求,這就需要PID控制具備在線自整定能力,這是PID控制技術的發展方向和需要解決的問題。把BP神經網絡技術與PID控制技術進行結合,可以發揮出BP網絡非線性映射的能力,可以實現自學習和整定,實現并行分布處理,并具備很好的容錯特性,可用到復雜非線性系統的數學模型組建及控制。
2. 2基于BP神經網絡的控制技術
上世紀90年代提出了多層前向的網絡反向算法,人們把其稱之為BP網絡算法,具有一個輸入層、一個輸出層以及多個隱含層,相同層的神經元并沒有太多關聯,不同的層級神經元會向前國,具備非線性活動函數的三層神經網絡,可以實現輸入到輸出空間的函數映射。神經網絡具備自學習能力,可以在離線條件下實現對控制對象的識別,建立起神經網絡識別器來不斷修正權值,從而適應識別對象的特征,達到與被控對象相同時,神經網絡控制器便可以進行在線控制。通過神經元自學習能力的不斷調整,可以實現在線自適應整定,從而提高了控制精度,與傳統的PID控制方法進行比較來看,可以起到更好的控制效果。
3結束語
綜上所述,DCS控制系統設計應該結合工業控制的具體需要,來對不同的功能單元進行設計,選用技術經濟性高的元器件,還需要把先進控制技術引入到DCS系統中來,采用BP神經網絡的控制技術與PID控制進行結合,使控制系統具備自學習能力,可以實現控制參數的在線自修正,從而達到理想的控制效果。
參考文獻:
[1]閔紅利. DCS系統設計及先進控制在DCS系統中運用[J]. 電子技術與軟件工程,2015(24):158.
[2]田運良. DCS系統維護的若干常見問題[J]. 石化技術,2018,25(04):225.
[3]陳峰. 火電廠熱工自動化DCS控制系統的應用及發展分析[J]. 電子技術與軟件工程,2018(22):99.
