一種多功能數(shù)據(jù)采集模塊的結(jié)構(gòu)設(shè)計與實現(xiàn)
2019-10-21 18:25:56陳帥郭建奇
科技風(fēng) 2019年15期
陳帥 郭建奇
摘?要:為縮小整機體積、擴展數(shù)據(jù)采集及控制系統(tǒng)的采集通道、提高系統(tǒng)靈活性、提高設(shè)備集成度,設(shè)計了一種集合電源、CPU子卡、CAN子卡、GIO基板四種分模塊的數(shù)據(jù)采集模塊,大大提高了系統(tǒng)的執(zhí)行效率,達到了“瘦身不瘦大腦”的目標(biāo)。
關(guān)鍵詞:數(shù)據(jù)采集模塊;集成度高;可靠性高
隨著機載計算機的不斷發(fā)展,“瘦身計劃”多次被提上日程,提高模塊的集成度已經(jīng)刻不容緩。因此,本文提出一種“四合一”的模塊設(shè)計方法,將電源、數(shù)據(jù)處理、數(shù)據(jù)傳輸、離散量&模擬量采集等多個功能集中在一個模塊上,該方法電路設(shè)計簡單、可靠性高,能夠進行多通道擴展,提高了系統(tǒng)的靈活性與實時性。
1 總體設(shè)計方案
該型采集模塊由GIO基板、CPU模塊、CAN模塊、電源模塊四部分組成。主要功能如下:對離散量和模擬量信號進行采集;實現(xiàn)與外部設(shè)備的通信(ARINC825D-CAN總線);DC-DC轉(zhuǎn)換電路具備數(shù)據(jù)記錄功能;預(yù)留測試/維護接口,實現(xiàn)數(shù)據(jù)的上載/下載以及程序的在線調(diào)試/燒寫功能;具備BIT功能,并具有運行狀態(tài)的指示功能和對SPDU內(nèi)部5V供電電源的監(jiān)控能力。
2 硬件設(shè)計
下面從接口以及產(chǎn)品工作方式這兩個方面來介紹該模塊的硬件設(shè)計。
(1)接口。a.機械接口。通過矩形連接器與機箱下方的出線式矩形連接器相連,保證其安裝位置。b.電氣接口。采集模塊的電氣接口類型和數(shù)量如下:28V/開離散量輸入采集接口:100路;模擬量輸入電壓采集接口:4路;雙余度ARINC825總線通訊接口:1路;以太網(wǎng)調(diào)試接口:1路;RS232狀態(tài)回顯接口:1路;故障存儲電路:設(shè)置128 kbytes 8位的NVSRAM存儲器。c.總線接口。采集模塊具備ARINC825總線接口,實現(xiàn)與機電管理分系統(tǒng)其他設(shè)備的各種通信功能。
(2)產(chǎn)品工作條件及方式。根據(jù)GSE*、STATUS0及STATUS1三種不同的狀態(tài),引導(dǎo)不同軟件運行。在本系統(tǒng)中,引導(dǎo)程序只根據(jù)GSE*離散量識別空中狀態(tài)和地面調(diào)試狀態(tài)。
3 難點技術(shù)
3.1 離散量輸入接口電路
28V/開路離散量信號采集電路主要將信號進行下拉、EMC濾波、比較輸出,轉(zhuǎn)換為可以進行TTL數(shù)字邏輯處理的數(shù)字信號。將信號的開路狀態(tài)通過下拉電阻轉(zhuǎn)化成電壓信號進行采集比較,電路設(shè)計如下圖所示。
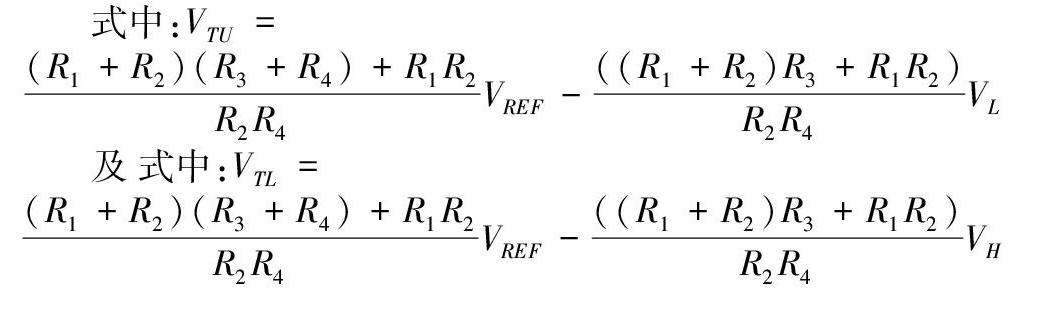
根據(jù)疊加定理和比較器輸入端特性可計算出下列公式:
式中:VTU=
(R1+R2)(R3+R4)+R1R2R2R4VREF-((R1+R2)R3+R1R2)R2R4VL
及式中:VTL=
(R1+R2)(R3+R4)+R1R2R2R4VREF-((R1+R2)R3+R1R2)R2R4VH
當(dāng)比較器輸出低狀態(tài)時,VL≈0V;當(dāng)比較器輸出高狀態(tài)時,等效于開路,經(jīng)外部電阻上拉至5V,VH≈5V。
依據(jù)上述公式和電路的阻值,可得出Vref =6.82V;VTU≈15.8V;VTL≈14.3V。
當(dāng)外部為28V狀態(tài),即Vin=28V〉15.8V,所以U4≈5V。
當(dāng)外部為開路狀態(tài),通過R2下拉到地,Vin≈0V<14.3V,所以依據(jù)電路原理,U4≈0V。
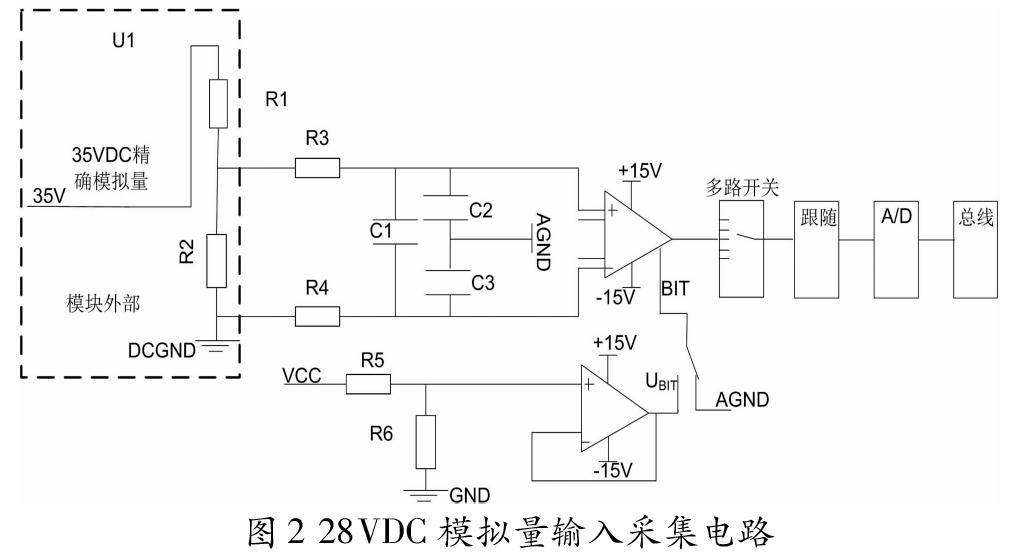
3.2 模擬量精確采集輸入接口電路
35V直流模擬量輸入信號通過分壓電路、濾波、比例放大、多路開關(guān)和電壓跟隨后進行A/D轉(zhuǎn)換。電路設(shè)計如下圖所示。
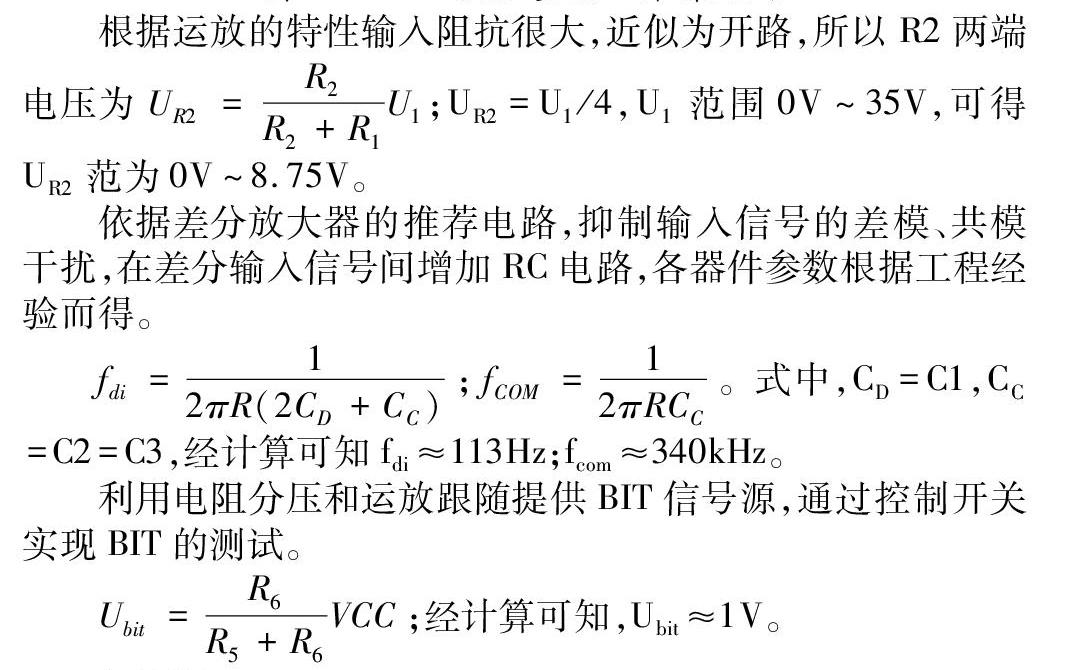
根據(jù)運放的特性輸入阻抗很大,近似為開路,所以R2兩端電壓為UR2=R2R2+R1U1;UR2=U1/4,U1范圍0V~35V,可得UR2范為0V~8.75V。
依據(jù)差分放大器的推薦電路,抑制輸入信號的差模、共模干擾,在差分輸入信號間增加RC電路,各器件參數(shù)根據(jù)工程經(jīng)驗而得。
fdi=12πR(2CD+CC);fCOM=12πRCC。式中,CD=C1,CC=C2=C3,經(jīng)計算可知fdi≈113Hz;fcom≈340kHz。
利用電阻分壓和運放跟隨提供BIT信號源,通過控制開關(guān)實現(xiàn)BIT的測試。
Ubit=R6R5+R6VCC;經(jīng)計算可知,Ubit≈1V。
4 結(jié)語
本文設(shè)計了一種“4合1”的數(shù)據(jù)采集及控制系統(tǒng),從系統(tǒng)結(jié)構(gòu)、硬件設(shè)計、難點技術(shù)對其進行了詳細(xì)的描述。采集模塊運用于新一代機載電子設(shè)備上,與系統(tǒng)中其他設(shè)備共同作用,使機載電子系統(tǒng)的性能達到最佳。經(jīng)過系統(tǒng)聯(lián)試試驗,采集模塊穩(wěn)定可靠,實踐結(jié)果表明,該設(shè)計方案合理可行,滿足機載電子系統(tǒng)的使用要求。
參考文獻:
[1]劉洪武,鄭俊飛,楊國為,等.基于WLAN的軌道通信系統(tǒng)的數(shù)據(jù)中轉(zhuǎn)方法[J].計算機系統(tǒng)應(yīng)用,2012(4):229-233.
[2]劉鑫,林兆華,杜壁秀.CAN總線分布式自動調(diào)焦控制系統(tǒng)設(shè)計[J].國外電子測量技術(shù),2014,33(8):44-48.
[3]劉邦運.POWERPC數(shù)據(jù)通信系統(tǒng)軟件實現(xiàn)[D].北京:北京郵電大學(xué),2011.