某型軍用雷達的仿真
2019-10-21 11:58:18馮玉賓
科技風 2019年15期
馮玉賓

摘?要:本文針對某軍用雷達展開研究,開發了一套新的雷達仿真模擬器件,同時考慮到部隊使用和操作的實用性,還增加了類大自動評估功能,通過對雷達波形的建模與仿真,并利用新的仿真處理技術,有效地處理了雷達波形中雜波的抑制和消除,較好的實現了雜波的徑向圓周掃描和圖像處理,滿足了部隊日常的訓練和教學要求。
關鍵詞:雷達;系統;仿真;顯示;波形
1 緒論
雷達系統的仿真、論證與評估一直都是一個難題。新型的雷達系統的設計、論證和評估需要基于仿真的平臺,實現未來戰場環境的評估和預測。
本文針對新型的雷達系統開展仿真設計,基于雷達所在的靜止載體平臺,分析雷達探測的目標和可能存在的干擾分布,然后對其建模并仿真分析,對雷達仿真過程中的回波圖像處理、岸基線等數據利用算法進行簡化處理,有效地完成了雜波的形成、偏離的定位、雷達顯示模式的多樣化;同時,實現了新型雷達所在載體的位置實時顯示與數據快速更新、中控臺與雷達通信數據的同步等關鍵技術。
2 坐標的轉換換算
新型軍用雷達的模擬器主要有雷達仿真器和雷達的操控臺組成。下面把這兩部分設計和仿真的關鍵點進行說明。
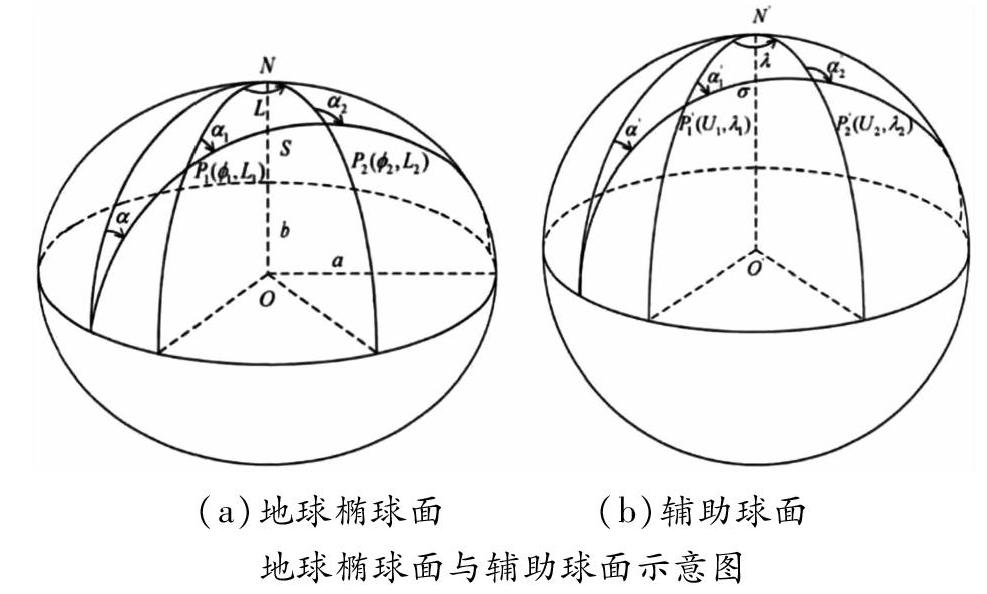
雷達的顯示部分主要是將雷達的回波、電子方位顯示線、活動標圈等通過線進行分層處理和顯示。雷達圖像在各層的基礎上進行繪制和顯示。層次主要有六層,即:操作顯示層、刻度顯示層、雜波顯示層、地圖海岸線顯示層、識別的目標顯示層和需要用到的符號層。雷達仿真中,對于地圖海岸線顯示層的產生多采用將地理坐標通過投影轉換,形成投影平面下的坐標值,再將該值轉為雷達屏幕上可以顯示的坐標值,最后繪制在雷達顯示器上。但由于坐標轉換過程中存在投影緯度漸變的情況,導致坐標轉換存在誤差,難以真實的反映實際的海岸線,所以需要先將海岸線坐標轉換為相對雷達的方位極坐標,再將該值轉換為以雷達為中心的平面坐標。由于船載的雷達航行在大海上,受地球曲率的影響,需要采用球面坐標進行顯示,同時需要考慮地球的直徑不是一個固定值,需要使用Vincenty等公式進行求解。
從圖中可以看到,P1,P2分別為橢球上的兩個點;a為地面延長線與橢球面上赤道的夾角。假設λ=L,然后進行仿真迭代,首先根據橢球上緯度Φ1和Φ2,求解緯度U1和U2,有:
U1=tan-1[(1-f)tanΦ1(1)
U2=tan-1[(1-f)tanΦ2(2)
將上式進行轉換,得到:
y=sinδ=(cosU2sinλ)2+(cosU1sinU2-sinU1cosU2)2(3)
x=cosδ=sinU1sinU2+cosU1+cosU2cosλ(4)
聯合上式,可得到輔助球面上的弧長為
δ=tan-1(y/x)(5)
再計算赤道的交角為:
sinα=cosU1cosU2sinλ/sinδ(6)
將式(6)帶入前面,得到:
cos(2δm)=cosδ-2sinU1sinU2/cos2α(7)
C=f16cos2α[4-3cos2α](8)
λ=L+f(1-C)sinα{δ+Csin[cos(2δm)+Ccosδ(-1+2cos22δm)]}(9)
最后,利用輔助球面的弧長修正值和方位角,通過Vincenty公式得到海岸線、雷達所在的方位角、極坐標等值,實現坐標的轉換。
3 系統建模與仿真
雷達系統的應用流程如下所示,通過建模將整個應用流程分為如下:
雷達建模階段,對目標的后向散射截面、干擾模型等進行建模,包括雷達天線方向圖、雷達信號的形式、雷達的發射鏈路的參數等。考慮到注入的方式為射頻方式,需要對雷達的發射和接收鏈路進行仿真分析,包括發射機鏈路、接收機鏈路,由于軍用雷達的發射和接收通道數量很多,如果只是采用陣元的方式進行仿真,設備的數量和線路則變得非常龐大,所以需要采用波束的方式進行仿真。
根據雷達天線的工作方式,確定雷達的方向圖表述為:
g=(θ,φ)=G=(θ,φ)E(θ,φ)e(θ,φ)(10)
綜合考慮天線的口徑損耗、天線的增益、駐波損耗等因子。
對目標進行建模時,考慮到目標的計算量、信號的真實度等因子,使用批量的散射模型進行模擬,包括多普勒頻移、天線加權等因子。
4 結語
在當今軍用雷達日益集成化和復雜化的大背景下,同時由于雷達所處的戰場環境日趨復雜,導致雷達系統的研制成本和訓練成本迅速增加,為了更好的構建雷達的作戰和使用環境,有效評估雷達作戰效能和戰場環境勢在必行。
參考文獻:
[1]任明秋,嚴革新,朱勇,等.復雜電磁環境下雷達抗干擾性能測試方法研究[J].儀器儀表學報,2016,38(6):1278-1279.
[2]周敏,蔡紅維,阮航.海南發射場測控雷達海雜波建模與仿真[J].國外電子測量技術,2015,34(2):33-34.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技資訊(2016年18期)2016-11-15 20:09:22
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44