基于北斗/GPS的工程機(jī)械車(chē)載定位監(jiān)控系統(tǒng)設(shè)計(jì)
2019-10-22 08:39:38林俊,廖平
制造業(yè)自動(dòng)化 2019年10期
林 俊,廖 平
LIN Jun, LIAO Ping
(中南大學(xué) 高性能復(fù)雜制造國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)沙 410083)
0 引言
工程機(jī)械是現(xiàn)代裝備制造業(yè)的重要組成部分,是為國(guó)民經(jīng)濟(jì)建設(shè)提供技術(shù)裝備的支柱產(chǎn)業(yè),對(duì)國(guó)家經(jīng)濟(jì)建設(shè)、現(xiàn)代工業(yè)化水平的提高以及產(chǎn)業(yè)結(jié)構(gòu)戰(zhàn)略規(guī)劃等方面起著至關(guān)重要的作用[1,2]。隨著國(guó)家工業(yè)化進(jìn)程的加快,工程機(jī)械大規(guī)模使用,而且作業(yè)范圍不斷擴(kuò)大,這無(wú)疑增加了工程機(jī)械的監(jiān)控管理難度,因此研究和開(kāi)發(fā)出一種能夠準(zhǔn)確確定工程機(jī)械的地理位置且能遠(yuǎn)程進(jìn)行監(jiān)控的定位監(jiān)控系統(tǒng)具有十分重要的意義。
北斗衛(wèi)星導(dǎo)航系統(tǒng)(以下簡(jiǎn)稱(chēng)北斗系統(tǒng))是中國(guó)著眼于國(guó)家安全和經(jīng)濟(jì)社會(huì)發(fā)展需要,自主建設(shè)、獨(dú)立運(yùn)行的衛(wèi)星導(dǎo)航系統(tǒng),現(xiàn)已逐步開(kāi)始對(duì)民用市場(chǎng)開(kāi)放。北斗系統(tǒng)具有短報(bào)文通信功能,使得工程機(jī)械在作業(yè)環(huán)境惡劣、通信不佳的情況下仍可保持通信,這為搶險(xiǎn)救災(zāi)帶來(lái)極大的便利。考慮到北斗系統(tǒng)現(xiàn)階段服務(wù)區(qū)域的限制,本文就上述問(wèn)題,提出了一種基于北斗/GPS雙模定位的工程機(jī)械車(chē)載定位監(jiān)控系統(tǒng)設(shè)計(jì)方案,既能滿(mǎn)足工程機(jī)械高精度定位導(dǎo)航的需求,又能提供北斗系統(tǒng)與GPS系統(tǒng)的競(jìng)爭(zhēng)力,有助于推動(dòng)國(guó)家北斗衛(wèi)星導(dǎo)航產(chǎn)業(yè)化的發(fā)展[3~7]。
1 定位數(shù)學(xué)模型
1.1 北斗單系統(tǒng)數(shù)學(xué)模型
采用偽距法分析北斗單系統(tǒng)定位[8,9],接收端除了接收觀(guān)測(cè)點(diǎn)三個(gè)空間坐標(biāo)分量(x,y,z)外,還有接收端的時(shí)鐘差,一共有4個(gè)未知量,因此,為了求解這4個(gè)未知量,需要4顆或4顆以上衛(wèi)星的偽距測(cè)量值,如圖1所示。

圖1 北斗衛(wèi)星定位原理
對(duì)4顆衛(wèi)星進(jìn)行偽距測(cè)量得到如下方程組:

為求解方程組(1),本文采用線(xiàn)性化的迭代方法進(jìn)行求解。假設(shè)接收機(jī)的近似位置已知,則真實(shí)位置(x,y,z)可由近似位置和偏移量來(lái)表示,再加上時(shí)間偏差估計(jì)值則可得到單一近似偽距函數(shù):
方程(2)的解可看作近似分量和增量分量?jī)刹糠纸M成,因此有:

對(duì)式(3)在近似點(diǎn)處用一階Taylor級(jí)數(shù)展開(kāi)[10]并截去一階導(dǎo)數(shù)之后的項(xiàng)以消除非線(xiàn)性項(xiàng),經(jīng)過(guò)線(xiàn)性化處理后單一偽距方程可表示為:

因此方程組(1)可表示為:

其中,

方程組(1)的解為:

當(dāng)采用超過(guò)4顆衛(wèi)星來(lái)定位時(shí),用最小二乘法[11]求解方程組,得到方程組(1)的解為:

1.2 雙系統(tǒng)聯(lián)合定位數(shù)學(xué)模型
同樣采用偽距法對(duì)北斗和GPS雙系統(tǒng)聯(lián)合定位進(jìn)行分析。在雙系統(tǒng)聯(lián)合定位前,北斗系統(tǒng)和GPS系統(tǒng)的坐標(biāo)基準(zhǔn)和時(shí)間基準(zhǔn)需要統(tǒng)一。由于北斗系統(tǒng)采用的CGCS2000坐標(biāo)系和GPS采用的WGS-84坐標(biāo)系都是協(xié)議地心直角坐標(biāo)系,其坐標(biāo)系的原點(diǎn)、尺度和定向都相同,且兩個(gè)坐標(biāo)系的精度都達(dá)到了5cm,因此對(duì)于工程機(jī)械的定位而言,兩個(gè)坐標(biāo)系可看作同一個(gè)坐標(biāo)系,不需要進(jìn)行坐標(biāo)系間的轉(zhuǎn)換。北斗的時(shí)間系統(tǒng)和GPS的時(shí)間系統(tǒng)采用的時(shí)間基準(zhǔn)不一致,而組合定位算法是在單系統(tǒng)各自獨(dú)立定位的基礎(chǔ)上擴(kuò)展而來(lái),定位原理相似,因此通過(guò)增加狀態(tài)變量把各自衛(wèi)星定位系統(tǒng)的接收模塊時(shí)鐘差當(dāng)做未知量一起求解,從而使得組合定位系統(tǒng)的時(shí)間統(tǒng)一。基于上述原理,在北斗單系統(tǒng)的基礎(chǔ)上增加接收模塊相對(duì)GPS的時(shí)鐘差未知量,如北斗單系統(tǒng)一樣建立偽距方程組,通過(guò)線(xiàn)性迭代的方法將方程組線(xiàn)性化,再采用最小二乘法求解方程組中的5個(gè)未知量,因此,采用雙系統(tǒng)聯(lián)合定位時(shí)觀(guān)測(cè)的衛(wèi)星數(shù)量必須大于等于5顆。
2 定位監(jiān)控系統(tǒng)總體設(shè)計(jì)
本文設(shè)計(jì)的工程機(jī)械車(chē)載定位監(jiān)控系統(tǒng)主要由核心處理單元、LCD人機(jī)交互界面、定位模塊和4G無(wú)線(xiàn)通信模塊組成,如圖2所示。其中定位模塊采集工程機(jī)械的地理位置、航向、速度等信息;核心處理單元對(duì)定位模塊采集的信息進(jìn)行存儲(chǔ)處理,并傳輸至LCD人機(jī)交互界面顯示;4G無(wú)線(xiàn)通信模塊則通過(guò)UDP網(wǎng)絡(luò)協(xié)議將工程機(jī)械的地理位置等信息上傳至遠(yuǎn)程服務(wù)器,實(shí)現(xiàn)對(duì)工程機(jī)械的遠(yuǎn)程監(jiān)控。

圖2 車(chē)載定位監(jiān)控系統(tǒng)總體框圖
3 系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)總體框圖如圖3所示,本定位監(jiān)控系統(tǒng)硬件電路采用“核心板+功能板”方案進(jìn)行設(shè)計(jì),核心板電路包含了i.MX6Q核心處理器、2G DDR3內(nèi)存、8G eMMC存儲(chǔ)單元等,實(shí)現(xiàn)對(duì)整個(gè)系統(tǒng)的控制、數(shù)據(jù)處理存儲(chǔ)等功能;功能板電路由供電模塊、定位模塊、LCD顯示、4G無(wú)線(xiàn)通信模塊等組成,分別用來(lái)實(shí)現(xiàn)系統(tǒng)各個(gè)子功能。
3.1 核心板

圖3 定位系統(tǒng)硬件電路結(jié)構(gòu)框圖
本文的核心板設(shè)計(jì)采用工業(yè)級(jí)汽車(chē)處理器i.MX6Q系列高性能處理器,是基于ARM Cortex-A9內(nèi)核的處理器,擁有四個(gè)核心,主頻高達(dá)1GHz,內(nèi)部集成UART、I2C、SPI、PCIe等諸多外設(shè),還自帶圖形加速、音視頻編解碼等功能,性能強(qiáng)悍,同時(shí)支持Linux系統(tǒng)和Android系統(tǒng),既能滿(mǎn)足當(dāng)前定位系統(tǒng)的功能需求,又便于后期的系統(tǒng)功能擴(kuò)展和升級(jí)。核心板上還擴(kuò)展了2G DDR3內(nèi)存和8G eMMC存儲(chǔ)單元以保證系統(tǒng)高效穩(wěn)定運(yùn)行和數(shù)據(jù)的存儲(chǔ)。
3.2 定位模塊
本文的定位模塊采用中科微電子的ATGM336H-5N搭建外圍電路來(lái)實(shí)現(xiàn),如圖4所示。引腳11外接GPS天線(xiàn)增強(qiáng)接收衛(wèi)星信號(hào)的強(qiáng)度,引腳4發(fā)出秒脈沖,外接發(fā)光二極管D2,正常工作時(shí)發(fā)光二極管以脈沖頻率閃爍,便于確定定位模塊是否正常工作運(yùn)行。引腳6外接后備電池,同時(shí)提供3.3V電源以保證定位模塊得以熱啟動(dòng)。定位模塊可以與處理器通過(guò)I2C或者UART進(jìn)行通訊,因本系統(tǒng)采用間接數(shù)據(jù)存儲(chǔ)方式,故采用UART與處理器通訊,通過(guò)引腳2發(fā)送數(shù)據(jù)給處理器,引腳3接收處理器發(fā)送的數(shù)據(jù)。
3.3 4G無(wú)線(xiàn)通信模塊
無(wú)線(xiàn)通信模塊是本地和監(jiān)控中心進(jìn)行通信的核心,綜合考慮當(dāng)今的網(wǎng)絡(luò)通信環(huán)境、傳輸速率以及成本,本文最終采用美芯訊科技有限公司的SIM7100C4G模塊作為無(wú)線(xiàn)數(shù)據(jù)傳輸通信模塊。
3.4 LCD顯示模塊
本系統(tǒng)要求能夠本地顯示當(dāng)前地理位置信息,考慮到工程機(jī)械的工作環(huán)境比較惡劣,因此本文采用7寸TFT高清電容觸摸屏,分辨率1024×600,既能清晰地顯示所需信息,也能有效地增強(qiáng)抗干擾能力。
3.5 供電電源模塊
本系統(tǒng)主要需要12V、5V、3.3V三種電源,其中12V為外部接入電源,5V主要用于LCD供電,3.3V用于給處理器、4G模塊、定位模塊等功耗相對(duì)較低的部分供電。
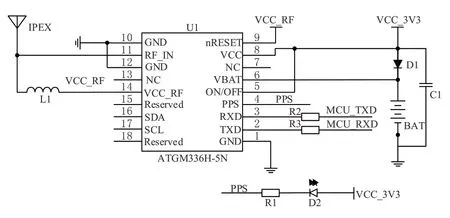
圖4 定位電路
5V電源和3.3V電源都是由12V電源利用降壓芯片MP1495DJ獲得,輸出電壓與輸出電路中的兩個(gè)電阻參數(shù)有關(guān),其計(jì)算公式為:


圖5 電源電路
以5V電源電路為例,圖5即為5V穩(wěn)壓電路的實(shí)現(xiàn)原理圖。要獲得3.3V電壓只需更改R1和R2的參數(shù),將圖5中R2所標(biāo)識(shí)的電阻阻值由7.5K改為12.7K即可。
4 系統(tǒng)軟件設(shè)計(jì)
本文的系統(tǒng)需要接收ATGM336H-5N雙模定位模塊的衛(wèi)星數(shù)據(jù)信息,對(duì)接收的數(shù)據(jù)包進(jìn)行解析獲得需要的有效數(shù)據(jù),并在LCD上顯示定位信息及電子地圖信息,同時(shí)需要向監(jiān)控中心上傳地理位置信息。為滿(mǎn)足軟件系統(tǒng)的交互性、穩(wěn)定性等需求,本文采用“Linux+Qt”的方式實(shí)現(xiàn)定位系統(tǒng)軟件[12],軟件系統(tǒng)整體由底層軟件和上層應(yīng)用軟件組成。底層軟件包括u-boot-2015.04的移植、kernel-4.1.15移植以及Qt根文件系統(tǒng)搭建,上層應(yīng)用軟件則主要由定位部分和4G無(wú)線(xiàn)數(shù)據(jù)傳輸部分構(gòu)成。
4.1 定位部分軟件設(shè)計(jì)
4.1.1 定位模塊數(shù)據(jù)輸出協(xié)議簡(jiǎn)介
ATGM336H-5N雙模定位模塊輸出數(shù)據(jù)協(xié)議整體兼容國(guó)際標(biāo)準(zhǔn)NMEA0183協(xié)議,數(shù)據(jù)格式協(xié)議框架如表1所示。
由于ATGM336H-5N模塊支持北斗/GPS雙模定位,因此輸出數(shù)據(jù)還包含了特殊的協(xié)議幀[13,14]:兩條地址符相同的$GNGSV協(xié)議幀,數(shù)據(jù)量會(huì)隨著北斗定位衛(wèi)星信號(hào)強(qiáng)度變化而發(fā)生改變的$BDGSV協(xié)議幀。
4.1.2 定位模塊輸出數(shù)據(jù)解析
ATGM336H-5N模塊輸出的數(shù)據(jù)有一定的特點(diǎn),每個(gè)數(shù)據(jù)包都包含以下協(xié)議幀:
$GPTXT、$GNGGA、$GNGLL、$GPGSA、$BDGSA、多條$GPGSV、2條$BDGSV、$GNRMC、$GNVTG和$GNZDA,以上協(xié)議幀的輸出格式都遵循圖4所示的數(shù)據(jù)格式協(xié)議框架。ATGM336H-5N模塊輸出數(shù)據(jù)的解析包含了下面四個(gè)關(guān)鍵基本步驟:數(shù)據(jù)包的分割、協(xié)議幀的識(shí)別、協(xié)議幀的分割、協(xié)議幀的信息解讀[15]。本文數(shù)據(jù)解析都是基于上述四個(gè)基本步驟加上協(xié)議幀糾錯(cuò)完成解析的。由于ATGM336H-5N模塊連續(xù)不斷地通過(guò)串口發(fā)送數(shù)據(jù),串口數(shù)據(jù)容易發(fā)生粘包,且MCU定時(shí)讀取串口數(shù)據(jù),接收的數(shù)據(jù)可能不完整,因而無(wú)法直接使用接收的數(shù)據(jù),而且數(shù)據(jù)量也比較大,因此在解析ATGM336H-5N模塊的輸出數(shù)據(jù)時(shí)增加了處理機(jī)制,盡量保存完整的數(shù)據(jù),接收并處理數(shù)據(jù)的過(guò)程如圖6所示。
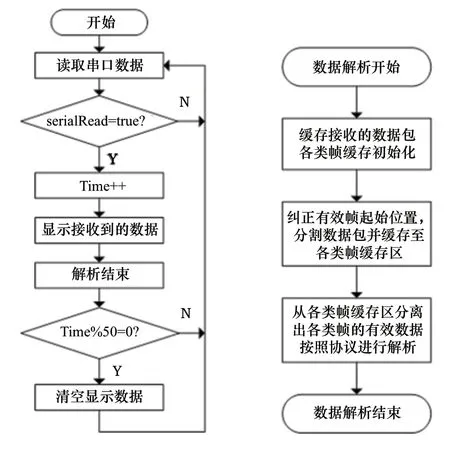
圖6 數(shù)據(jù)處理流程
4.2 無(wú)線(xiàn)數(shù)據(jù)傳輸部分軟件設(shè)計(jì)
地理位置信息數(shù)據(jù)利用4G通信模塊采用UDP協(xié)議上傳至遠(yuǎn)程服務(wù)器,數(shù)據(jù)傳輸流程如圖7所示。

圖7 數(shù)據(jù)無(wú)線(xiàn)傳輸流程

表1 數(shù)據(jù)格式協(xié)議框架
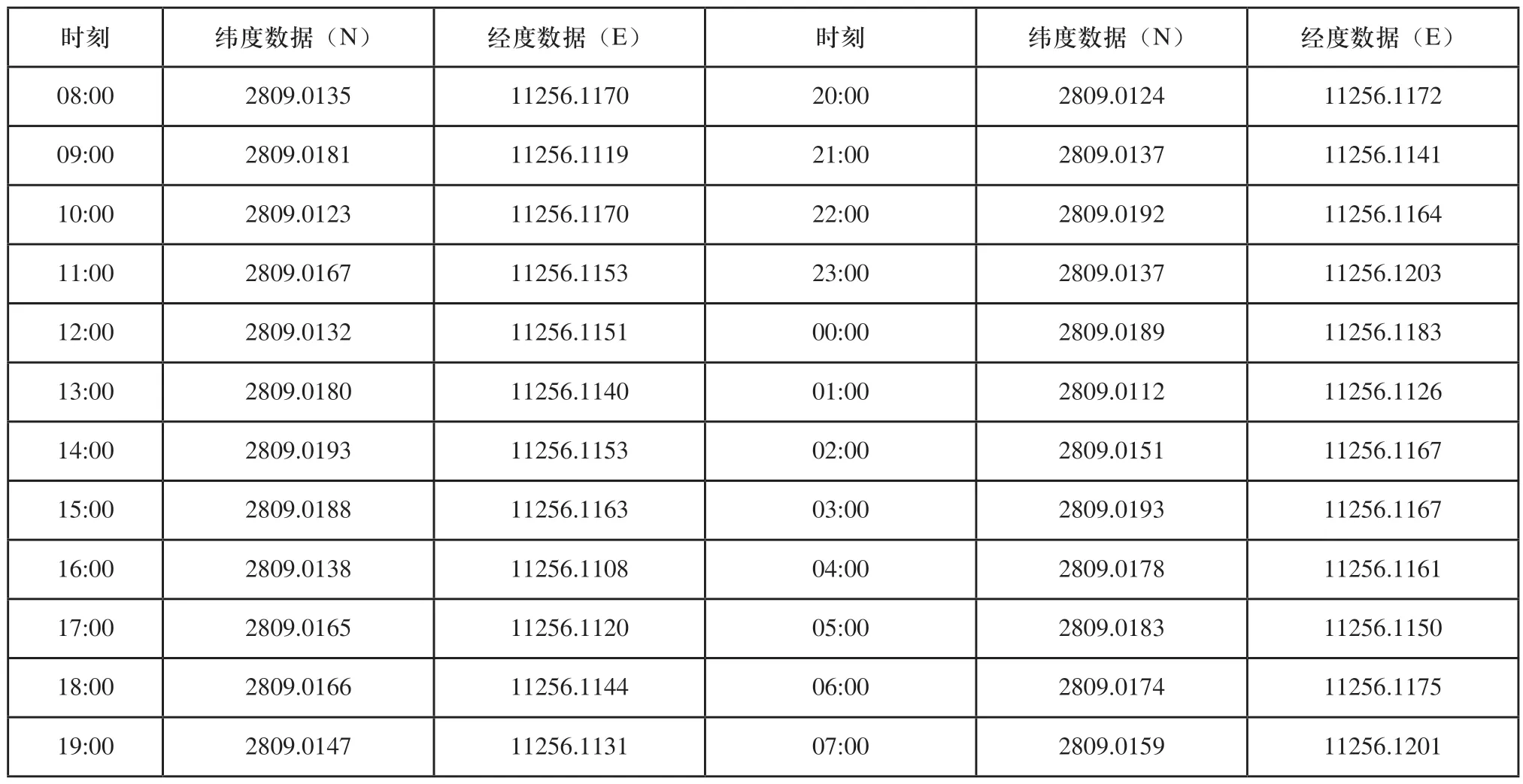
表2 24小時(shí)定位監(jiān)測(cè)數(shù)據(jù)
5 實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證文中監(jiān)控系統(tǒng)的穩(wěn)定性,從早上8:00至次日7:00每間隔一小時(shí)從監(jiān)控中心讀取定位數(shù)據(jù)信息,實(shí)驗(yàn)結(jié)果如表2所示,結(jié)果表明文中的系統(tǒng)具有良好的穩(wěn)定性。文中的系統(tǒng)實(shí)時(shí)定位效果可以在LCD上顯示,顯示效果如圖8所示,達(dá)到了預(yù)期的要求。

圖8 實(shí)時(shí)定位效果
6 結(jié)語(yǔ)
本文設(shè)計(jì)的基于北斗/GPS的工程機(jī)械車(chē)載定位監(jiān)控系統(tǒng),從硬件和軟件兩個(gè)方面進(jìn)行設(shè)計(jì)開(kāi)發(fā),通過(guò)系統(tǒng)試驗(yàn)驗(yàn)證,不僅實(shí)現(xiàn)了工程機(jī)械的定位導(dǎo)航,還實(shí)現(xiàn)了對(duì)工程機(jī)械的遠(yuǎn)程監(jiān)控,極大地方便了工程機(jī)械的管理,具有一定的實(shí)用性?xún)r(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
商品與質(zhì)量(2021年43期)2022-01-18 05:27:58
銅業(yè)工程(2021年2期)2021-06-27 10:36:24
銅業(yè)工程(2021年1期)2021-04-23 01:45:08
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年1期)2019-12-04 15:10:07
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
汽車(chē)觀(guān)察(2018年9期)2018-10-23 05:46:44

- 制造業(yè)自動(dòng)化的其它文章
- 基于多重啟動(dòng)迭代掃描的需求可拆分車(chē)輛路徑問(wèn)題
- 基于自動(dòng)化軟件功能的計(jì)算機(jī)網(wǎng)絡(luò)管理系統(tǒng)設(shè)計(jì)
- 基于ERP的耗材采購(gòu)管理系統(tǒng)設(shè)計(jì)與應(yīng)用
- 數(shù)值天氣預(yù)報(bào)的自動(dòng)化太陽(yáng)能光伏功率資源評(píng)估組合算法
- 基于PLC的熱電廠(chǎng)反滲透水處理系統(tǒng)控制系統(tǒng)設(shè)計(jì)
- 無(wú)芯鋼卷抱圓器抱圓機(jī)構(gòu)設(shè)計(jì)與優(yōu)化研究