一種智能交通管理終端設計與實現
2019-10-23 03:20:26馬新華
微型電腦應用 2019年10期
馬新華
(西安航空學院 計算機學院, 西安 710077)
0 引言
目前交通監控管理管理系統,仍然多以攝像頭監控為主。這種技術雖然成熟,但造價不菲,且功耗高,也不能保證全方位監控。在機動車駕駛員的管理基本上沿用傳統的管理模式,采用人工的方式進行處理。傳統模式雖然從機制上比較健全和完善,但由于近年來駕駛員數量的急劇膨脹,道路交通情況的復雜化,車輛性能、類型的更新發展,加之交通管理部門對交通流信息采集的主要方式是感應線圈和視頻監測,對車輛信息的采集主要通過人工統計等傳統方式來獲取,采集到的信息是靜態的,覆蓋面窄、時效性差[1-2],傳統的管理方法已經不能滿足管理工作的需要。
本文設計了一種由車載模塊、檢測基站設備以及智能卡組成的智能交通管理終端,通過在車輛上統一安裝車輛電子信息卡(電子車牌)以及駕駛員電子信息卡、在路網建設信息采集基站,將所采集到的信息通過傳輸線路傳遞至中心機房。同時利用智能終端設備采集車輛和駕駛員信息,通過射頻識別技術實時、準確地進行交通流信息采集,對城市路網進行動態監測,及時掌握道路通行狀況,精準掌握城市交通擁堵瓶頸路段、路口的車流狀態和車型分布,迅速反饋給交警指揮中心,交警部門再利用各類道路交通誘導系統,將路況信息傳遞給駕駛員,對相對擁堵的路段進行提醒,引導駕駛員選擇流量較小的路段通行,緩解交通壓力,減少擁堵現象的發生。智能交通管理終端對數據進行采集,實現自動化傳送,上位機通過分析和統計數據,對發送數據不全的車輛可直接進行查處,并對丟失和肇事車輛可直接進行定位,大大提高查找速度。
1 智能交通管理終端
1.1 總體設計
根據應用需求,智能交通管理終端系統由車載模塊、檢測基站以及智能卡組成。為確保人車綁定,車載模塊必須同時檢測到駕駛員信息與以及車輛信息卡。綁定數據經檢測基站收集后,通過網絡通信系統傳送到控制中心,采集系統架構如圖1所示。
為達到200米內檢測200輛車,車速最高為200公里/小時的設計要求,在系統設計時考慮采用4個可用頻段和一個公共廣播頻段,由此可計算出每個車輛的平均檢測時間為72 ms。SI4432的傳播速率為100 kb/s,則在72 ms時間內,用于傳輸信號的時間為40 ms,用于沖撞等待的時間為32 ms,則40 ms一共可傳輸500個字節,對于SI4432,相當于發送速度為每ms發送12.5個Byte,完全可以傳播完成全部的信息。

圖1 智能交通管理終端采集系統架構
車載終端的集成安裝在車上,考慮車速以及周圍環境的影響,車載終端必須滿足功耗低,穿透力強,發射速率大,輻射范圍廣等特點。車載終端的總體設計如圖2所示。
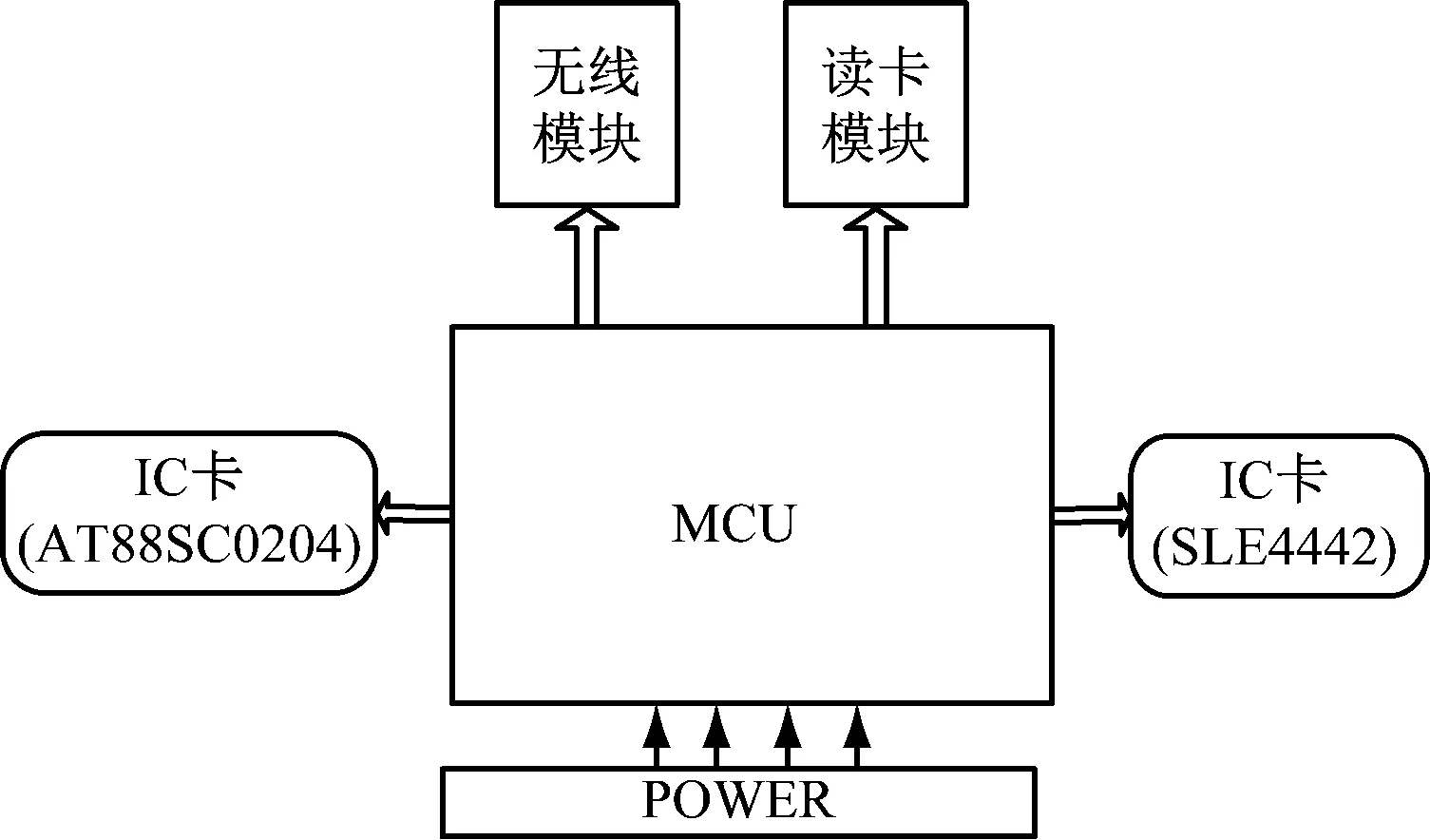
圖2 車載終端的總體設計圖
射頻卡SLE4442[3]讀卡電路,由于讀卡電路主控器STC12LE5A60S2的工作電壓3.3 V,但是讀卡器SLE4442壓是5 V,由于兩端電壓不匹配,導致單片機的控制管腳不能直接控制讀卡器,為了解決此問題,采用雙向轉壓芯片SN74LVC1T45進行轉壓后,單片機就可以直接對SLE4442進行控制。電路設計如圖3所示。
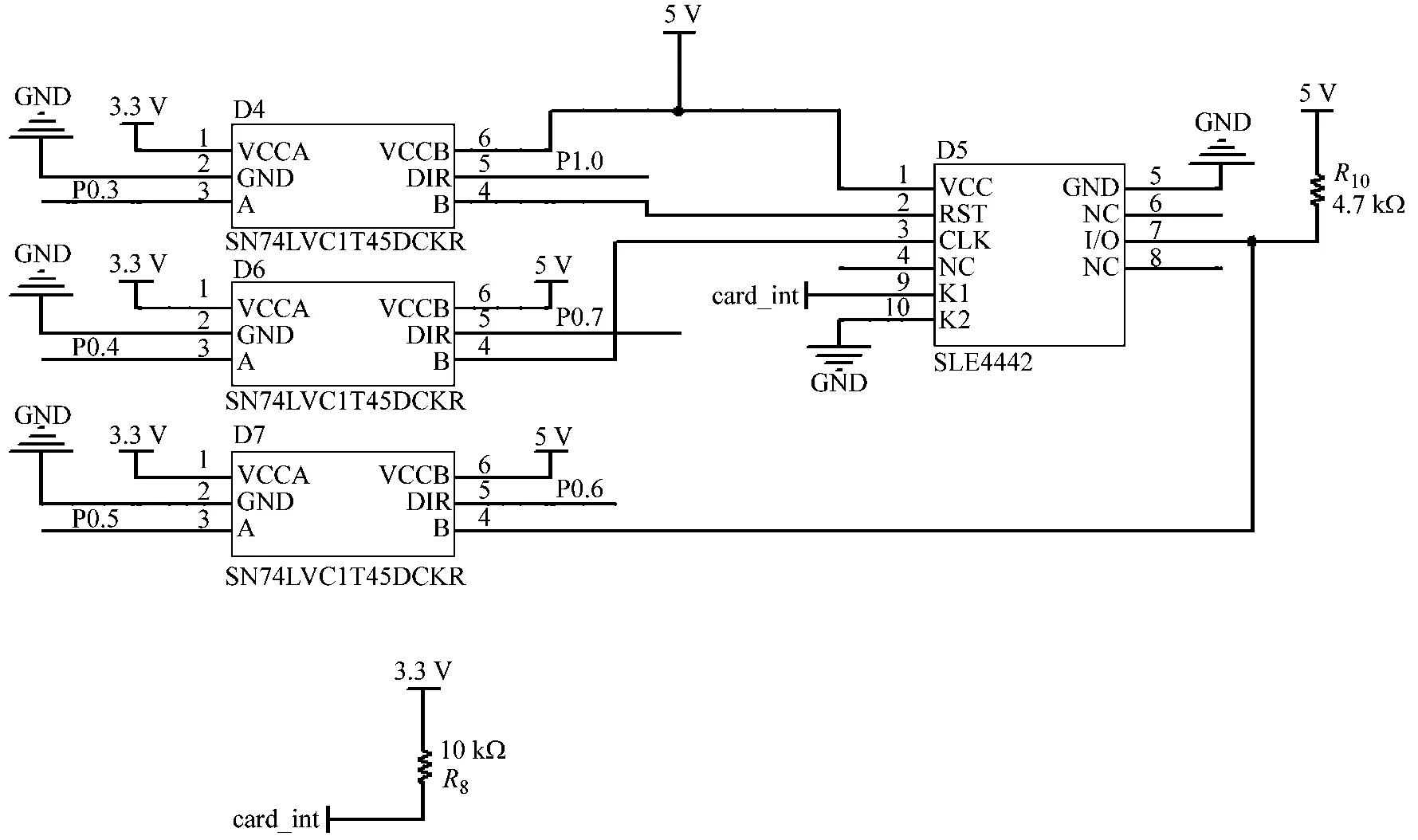
圖3 SLE4442讀卡電路
1.2 車載模塊
車載模塊安裝在車輛上,當駕駛員信息卡和車輛信息卡插入車載模塊時,車載模塊開始工作,當車輛駛過檢測基站使,車載模塊與檢測基站之間建立通訊,將駕駛員信息和車輛信息發送給檢測基站。
MCU控制模塊采用c8051f930芯片,主要完成兩張識別卡(車輛信息卡、駕駛員信息卡)的讀取,無線通信模塊協議處理、通信模塊控制,電源管理模塊控制,用戶界面控制這五大功能。
車載終端所選取的主控芯片為STC12LE5A60S2,相比較其他系列的單片機芯片,STC12LE5A60S2的工作電壓僅為3.3V,功耗較低,且由于帶有硬件SPI,便于對外設讀寫。
無線發射模塊采用SI4432芯片,接受控制模塊的控制,主要完成無線射頻信號的接收發射,調制/解調,信道選擇,同步提取,無線信息糾錯,收發信息緩沖等功能。
讀卡模塊主要是根據控制模塊的需求讀取卡片信息。
智能IC卡采用基于ISO7819-3標準的SLE4442芯片,為防止駕駛員信息卡在中途被拔掉或者替換掉,選用可接觸式SLE4442 IC卡智能卡使用的SLE4442 IC卡,主存儲器容量為256 K,保護區為00H-20H,其余為應用區。此卡可以在省電的情況下完成卡片識別和讀取功能。SI4432是一種中遠距離的無線通信設備,在433 MHz頻段下最遠傳輸距離可達上千米,相對于藍牙、WI-FI、ZigBee等傳統短距離無線通信技術,SI4432具有傳播距離遠、功耗低、傳播速率大 、抗干擾能力強等優點,同時帶有邏輯加密功能,必須經過密碼驗證后才可擦除。在使用中,如果此卡連續輸錯三次,則此卡自鎖,不能對其進行讀寫。車載模塊結構如圖4所示。
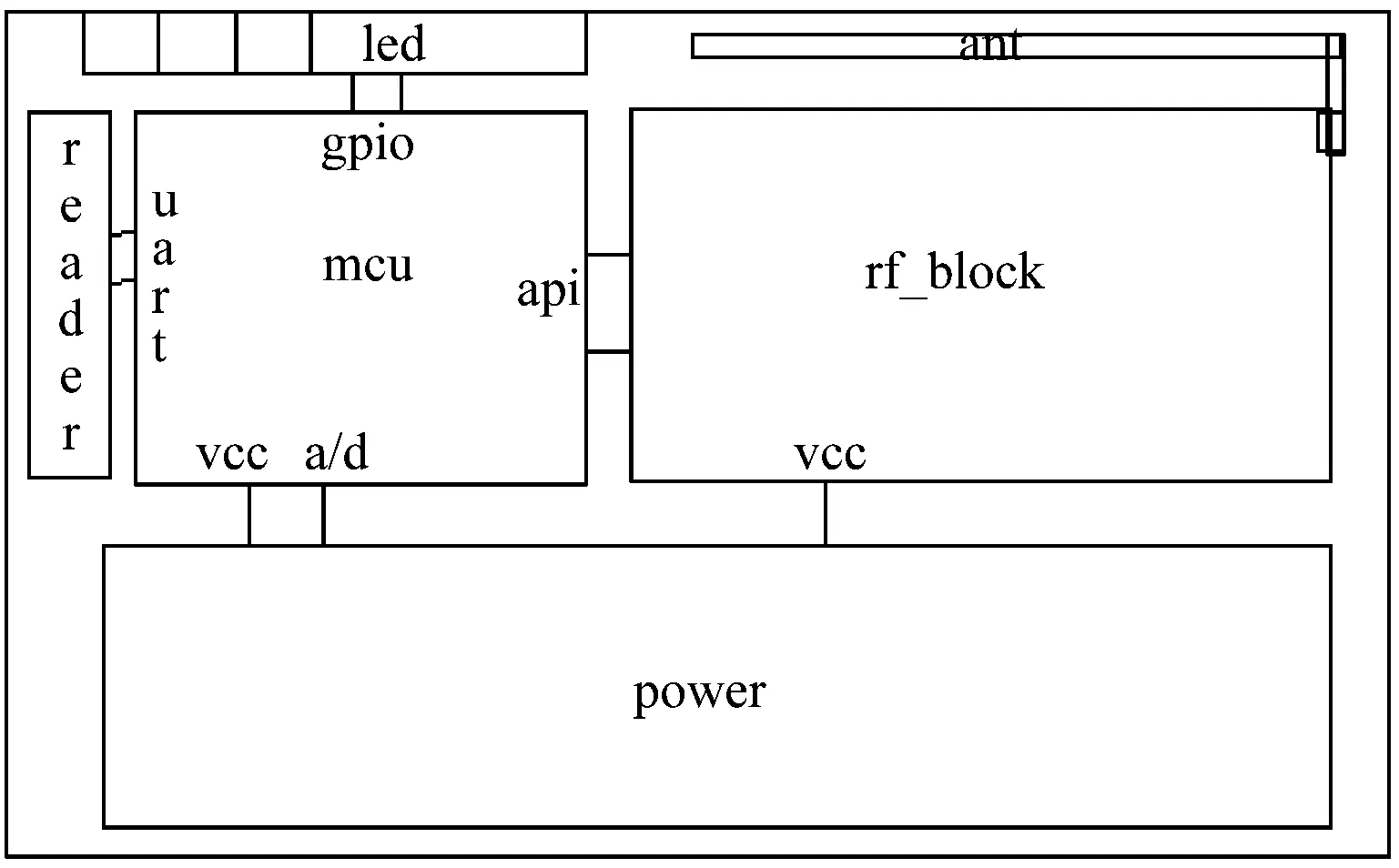
圖4 車載模塊結構圖
2 檢測基站設計
檢測基站包含一個廣播信道和4個接收信道。終端通過無線電路監聽到廣播信道的信息,自動發送給基站,基站通過4個不同頻率接收信道來接收信息,并把接收的信息通過CAN總線[3]發送給STM32總控制器后轉交給服務端。
基站信號接收電路的總體設計如圖5所示。

圖5 基站總體電路設計
根據實際需求,檢測基站要滿足速度不大于200 KM/H;車輛與檢測基站間距大于200 M;采用本地電池供電;待機時間大于180天;以及包含LED燈指示,包括電量、未插卡、通信指示等工作狀態指示。
檢測基站可提供1-4個檢測通道,如圖6所示。
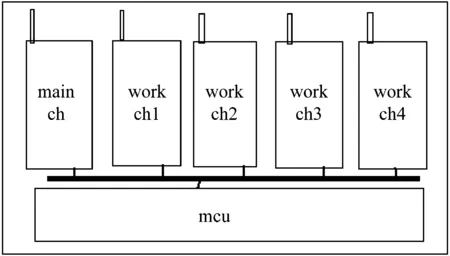
圖6 檢測基站結構圖
每個通道無線通信設計參數如下:射頻頻段VHF 410~420 MHz;發射功率10 dbm;接收靈敏度-80 dbm;傳輸速率9 600 bps以上;頻偏大于1 k;占用帶寬小于30 K;
檢測基站由主控板、信道板以下模塊組成:
主控板完成基站系統的控制功能,采用arm,crotex-m3系列的32位單片機STM32F103RBT,使用uart總線和各無線信道板連接。
信道板包括射頻模塊和信道處理單片機,完成與車載模塊的交互功能,并將車載信息通過uart總線傳回主控板。
射頻模塊采用和用戶模塊相同的sI4432,信道處理采用和用戶模塊相同的c8051f930。為減少主控處理器的壓力,將無線底層控制和基本通信處理在信道板內部完成,以使系統結構和模塊化明晰。
檢測基站無線接收選取SI4432,內部主控制器選取ARM Cortex-M3內核的STM32F106VE6[5]。
在一個由CAN總線構成的單一網絡中,理論上是可以掛載無數個節點[6],同時CAN總線的傳輸速率最大可達1 Mbit/s,有利于實時控制,在CAN節點出現錯誤的情況下,相對于串口、RS485總線傳輸會進行校驗并退出,保證總線上的其他節點不受影響,同時CAN總線具有低成本、較高的總線利用率、傳播速度可達1 Mbit/s、傳播距離遠以及可靠的處理檢錯機制等優勢,因此基站內部傳輸選用CAN總線傳輸。如圖7所示。

圖7 檢測基站CAN總線框圖
3 防碰撞協議的設計
軟件設計主要包含有無線發送的防碰撞協議和CAN模塊的傳送協議,由于SI4432不支持以上MAC協議,且為了確保發送過程的可靠性,發送端需要應答信號以確保發送信號已被準確接收,需要設計基于ACK的雙向CSMA/CA通信機制。總體流程圖如圖8所示。
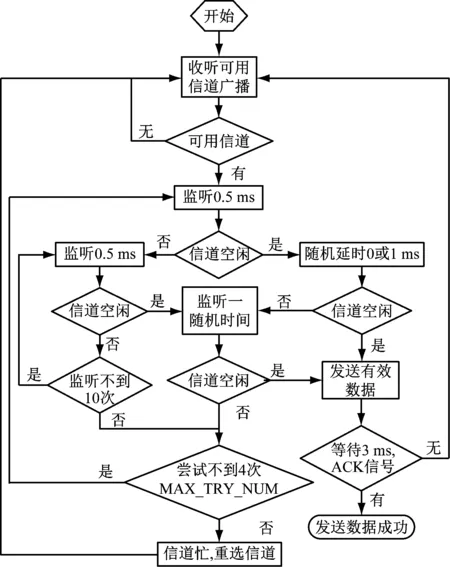
圖8 防碰撞協議流程圖
防碰撞協議主要代碼:
si4432_SetRSSI(); //打開幀同步檢測
for (i=0;i<10;i++) //嘗試發送
{
if ((send_ready == 1) )//信道不忙
{
send_ready = channel_isidle(rand()%2); //隨機延時0~1MS
for (j=0;j<4;j++)
{
if ((send_ready == 1))//還不忙則發送數據
{
si4432_CloseRSSI();//發送完畢之后關閉幀同步檢測
}
}
4 監控中心的設計
Qt-Project(LGPL v2.1)[7]是國際開源社區力推的跨平臺圖像庫,系統庫小巧靈便,使用完全免費。支持Windows,Linux,嵌入式Linux,MacOS等多種操作系統。使用面向對象的高級語言C++開發,為系統的運行效率提供了良好的保證。另外,Qt還支持Javcscript、XML方便功能擴展。其本身也對一些通用控件與算法提供了模塊化的實現,使用Qt可以在較短的時間內完成監控中心軟件的實現,高效率而低成本。此外,Qt亦支持嵌入式系統,可以在只修改很少量代碼的情況下將目前的系統移植至嵌入式終端內,方便以后的移動功能擴展。
監控中心主要包括信息欄、歷史信息以及信道編號,如圖9所示。
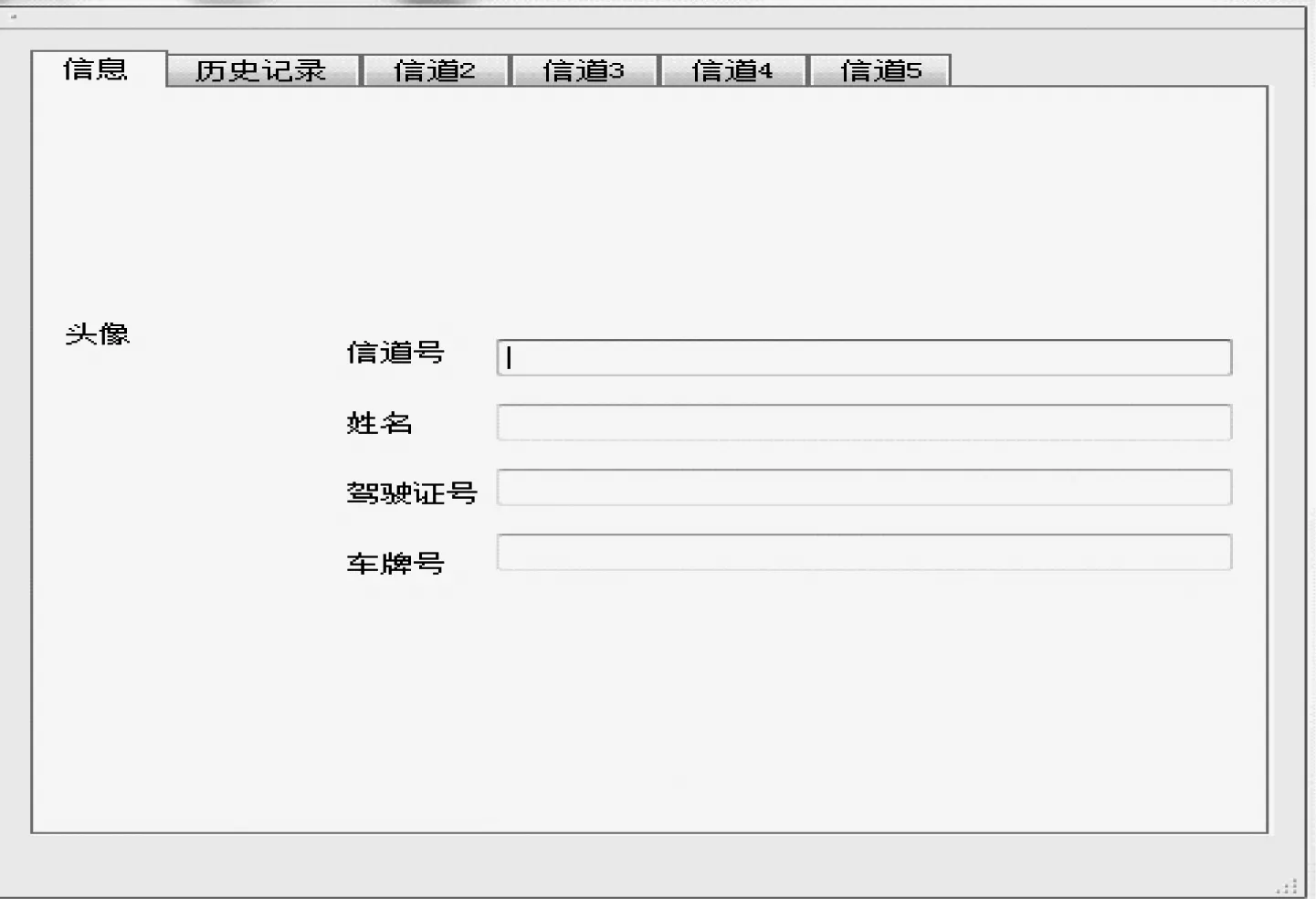
圖9
信息欄主要是對發來的單條數據進行細分,把駕駛員的圖像,上行信號的信道號,駕駛員姓名,駕駛證號碼以及車牌號顯示出來。
歷史信息欄主要是對歷時數據進行統計,按照發送時間降序排列,以便對歷史數據進行查看。
信道2,3,4,5為接收信道,主要是對每個信道發送出的信息進行顯示。假設是信道2發送出來的信息,在信道2欄也可以找到發送上來的信息。
5 智能交通管理終端測試
智能交通管理終端能否正確實現功能主要依賴于無線通信模塊能否正確傳送信息給基站,這是影響系統的最為重要的因素,首先我們將車輛信息和駕駛員信息分別寫入兩張不同的卡中,然后讓終端進入基站覆蓋范圍,一旦進入覆蓋區域卡面就會發送信息給基站,基站接收到信息之后會傳送給上位機及監控中心,并與寫卡信息對比來測試終端是否能夠達到設計要求。
經過系統反復的測試和完善之后,如前所述系統基本上實現了預期的設計目標,分別進行測試后,結果如下:
寫入信息:
1.駕駛員信息卡:姓名:李娜 駕駛證號:562586
2.車輛信息卡:車牌號:陜A25645。
顯示信息如圖10所示。

圖10 測試圖
6 總結
智能交通管理終端可以實現對駕駛員的管理、通過對車輛基本信息的采集,系統能夠全面實現車輛精準識別、路網動態監測、道路管制、假套牌車、黑車、盜搶車輛稽查、肇事車輛逃逸追查、車牌防偽等方面的系統化、數字化和信息化等功能,但還存在著定位不夠精準,道路狀態不能實時顯示等不足,這也是下一步進行研究的方向。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
公民與法治(2016年4期)2016-05-17 04:09:26
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
