在線粒子群優化PMSM 無傳感器控制研究
2019-10-25 04:44:58宋正強楊輝玲
自動化儀表 2019年10期
宋正強,楊輝玲,肖 丹
(1.揚州市職業大學電氣與汽車工程學院,江蘇 揚州 225012; 2.新南威爾士大學電子與信息工程學院,悉尼 新南威爾士 00098G)
0 引言
目前,對計算機智能技術的應用研究已經在多個領域展開。該研究可用于進行永磁同步電機(permanent magnet synchronous motor,PMSM)電機參數或PID控制器參數的設計[1-9]。在這些研究工作中,粒子群優化(particle swarm optimization,PSO)方法[4]首次由Kennedy and Eberhart博士在1995年提出。該方法也是一種現代遺傳算法。由于PSO方法的簡單性和計算的有效性,其已經被廣泛應用于大范圍優化問題,例如控制器增益參數的自適應調節和系統參數的確定,以及設備的機械故障診斷應用[10]。然而,該方法在控制器參數優化應用中依然存在一些問題和限制。
本文提出一種在線實時粒子群優化方法,以調整速度和q-軸電流控制器參數。該方法可以使磁場定向控制下的內置永磁同步電機(interior permanent magnet synchronous motor,IPMSM)驅動系統獲得更好的動態和穩態性能。同時,通過檢測電機實際運行時的電流和速度值,建立多個不同的目標函數值。
1 自適應磁鏈觀測器
自適應觀測器建立在以d軸定向在永磁體磁鏈的轉子d-q坐標系下[11]。本文所提出的用來估算轉子速度和電流值的自適應觀測器結構如圖1所示。
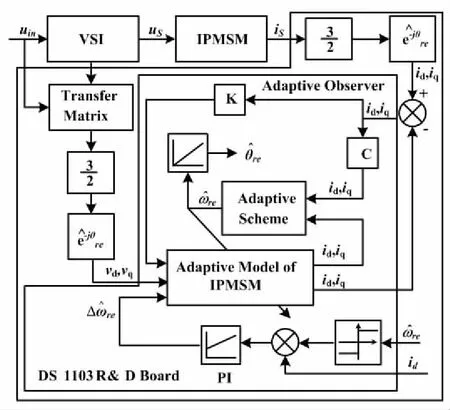
圖1 自適應觀測器結構圖
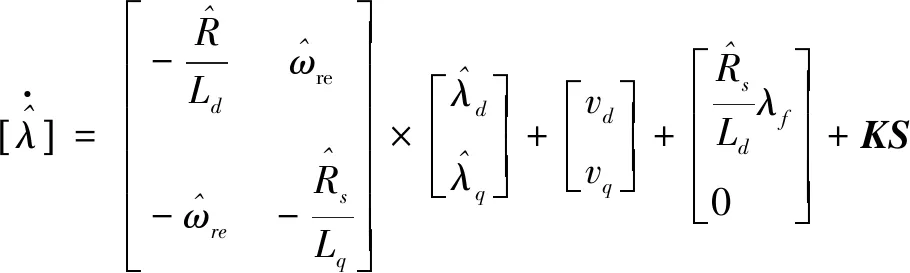
(1)
(2)
式中:符號^表示估算值;K為觀測器的反饋增益;滑膜曲面矩陣S由定子電流誤差所定義。
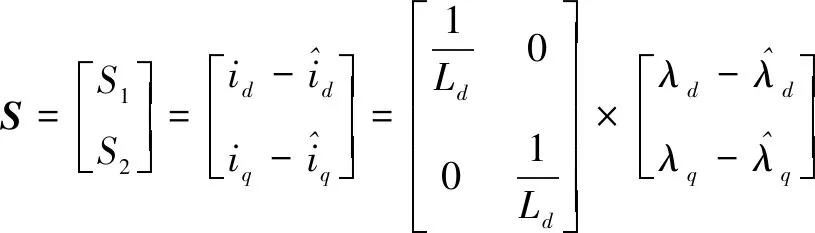
(3)
磁鏈估算值動態誤差矩陣定義如下:
(4)
自適應模型輸入量可以從李亞普穩定性分析中來獲得,輸出量為轉子速度并用作自適應模型的主要修正量。
(5)
為了提高速度估算值的動態行為,引入一個比例控制器參數常量作為PI參數的初始估計值。
(6)
觀測器增益矩陣K=k1I+k2J可以通過電機極點(實虛部)獲得所需觀測器極點,并通過平面坐標系下矩陣k(k>0 )推導獲得k1、k2。
(7)
(8)
單采樣周期內在線粒子群優化流程如圖2所示。

圖2 單采樣周期內在線粒子群優化流程圖
在PMSM驅動系統無傳感器控制方法中, 定子電阻的變化會降低系統的動態特性,并導致電機穩態運行時轉子電流和位置的估算值與其測量值之間的誤差增大。這一點也將引起無傳感器控制系統的不穩定性。為了減少定子電阻變化對系統性能的影響,本文在自適應觀測模型中引入一個速度修正量。該修正量是根據d軸電流誤差變化推導所得,用來修正所估算的磁鏈值,進而提高觀測器的準確性。
(9)
(10)
式中:Kp1和KI1分別為PI 控制器參數,用于產生因定子電阻值變化而需要的速度修正量。
2 控制器參數優化的在線PSO方法
2.1 PSO方法基本原則
PSO是由Kennedy and Eberhart在1995年提出的一種進化遺傳算法。該方法通過不斷迭代更新粒子群中每個粒子的信息,從而搜索到全局最優值。每個粒子都代表一種解決方法,且每個粒子都擁有各自的位置X和移動速度V。 位置矩陣X中的每一行都代表一個粒子的位置信息。通過位置信息,可以獲得每個粒子的評估值。 在每次迭代中, 每個粒子的存儲值都隨著粒子的個體最優值(Pbest)和全局最優值(Gbest)的變化,不斷更新粒子群移動速度V。
已知粒子群局部最優位置值和全局最優位置值后,粒子群的速度矩陣和位置矩陣將采用如下公式更新:
(11)
X(t+1)=X(t)+V(t)
(12)
式中:j=1, 2, …,m;g=1, 2,…,n;t和(t+1)分別為當前迭代次數和下一時刻迭代次數;參數c1和c2為加速度常數,用于調整粒子沿Pbest和Gbest飛行方向和位置的最大步子。
通常情況下,參數c1和c2設定為2,r1和r2為分布在(0~1)之間的隨機數值。參數w為權重指數,并根據式(13)在運行過程中不斷從0.9調整到0.4。另外,該算法很容易在早期的迭代過程中,從局部最優值逃逸出來,并且加速后面的迭代過程。這增加了尋找全局最優值的可靠性。
(13)
式中:wmax和wmin為w的最大值和最小值;itermax為迭代次數的最大值。
(14)

2.2 在線粒子群優化方法應用
現有的大多數PSO方法用在控制器參數調節或參數確定方面的研究工作主要是離線進行的[3]。在整個優化工程中,為了評估待求最優解,比如PI控制器的增益參數在整個系統仿真過程中保持不變,而同時輸出誤差(如速度誤差)被不斷累積計算用來評價待求最優解,通常PSO算法需要一系列不斷迭代才能求得滿意解。每迭代一次,系統模型被仿真一次。因此,系統模型需要被仿真許多次才能找到最優解。實際應用中,IPMSM驅動系統不斷的重新啟動是不被允許的,這就意味著仿真結果不一定能在實際系統中獲得。
通常,一個采樣周期只有10~100 μs,在一個采樣周期內完成對每一個粒子所代表PI參數的評估是很困難的。因此,本文采用了新的在線粒子群優化方法,以不斷更新粒子群的位置矩陣X和速度矩陣Y,粒子群的局部最優值Pbest和全局最優值Gbest將在30×10內更新完成。該方法在一個采用周期內檢測速度和電流值作為采樣值,然后更新當前粒子的速度和位置信息,而不是粒子群整體。IPMSM參數、控制器參數、控制系統參數分別如表1~表3所示。

表1 IPMSM 參數

表2 控制器參數

表3 控制系統參數
2.3 評價函數的定義
為了優化整個電機驅動的響應曲線,通過檢測電機輸出電流和速度值,定義評價函數是由多個性能指標并具有不同權重相加而獲得的。具體公式見式(15)~式(18)。
(15)
f1=[ωre(k)-ωre(k-1)]2
(16)
(17)
(18)

3 粒子群優化離線仿真測試
本文首先在MATLAB/SIMULINK環境下進行模型的離線仿真,以檢驗無傳感器磁場定向控制PMSM驅動系統的在線粒子群優化方法的性能。IPMSM的驅動系統基本參數由表1提供,控制器采樣時間選定為100 μs。該數值和實際試驗系統控制器采樣保持一致。表2給出了控制器控制參數以及目標函數值,且PSO迭代次數為1、10、20和30。初始粒子群種群大小為30,且每一個粒子有兩個變量 (kp_s,ki_s),分別代表搜索空間位置信息。經過30次迭代后, the results of Gbest將會作為優化后的結果更新,速度誤差的目標函數值也將一步縮小。
根據IPMSM系統PSO優化過程中目標函數值的變化情況,可知其變化率很快。
為了測試本文所提的方法,將兩種不同控制器(即傳統的PI控制和PSO優化方法)應用在PMSM驅動系統中,并對兩種不同控制器應用效果進行仿真比較。為了證明本文所提觀點,階躍響應指令和負載擾動分別提供給基于PSO調節的控制器和基于傳統固定PI控制器參數,用來比較兩種策略的控制效果。
4 實時在線仿真測試
本文所提出的無傳感器控制方案通過DS1103建立實時在線仿真平臺,通過PWM同步中斷服務程序完成空間矢量調制策略和無傳感器控制。另外,三相PWM信號可以通過DS1103預先設定死區時間來產生,三相電壓源逆變器通過定時器I/O口和DAC通道檢測三相PWM信號以及DC直流母線電壓來產生。永磁同步直流電機單獨由直流電源控制并提供測試系統需要的負載,并且負載可變化。試驗中用到的嵌入式永磁同步電機參數和仿真模型中參數一致,由表1提供。
表3提供了控制系統參數,電壓源開關頻率設定為10 kHz,直流母線電壓設定為340 V。
在測試中,觀測器中定子電阻值在考慮補償情況下變化。當電動機運行在大約200 r/min且帶有63%額定轉矩時,在三相電源輸入側突然切入3.4外部電阻。定子電阻的階躍變化影響可以通過觀測器中修正量在0.5 s內消除。電流和速度估算誤差逐步減小到0,證明了采用修正后滑膜觀測器與速度估算器相結合方法的有效性。
本文所提出的無傳感器控制策略,在突加擾動和速度階躍指令情況下的運行性能如下。在暫態運行時,速度估算誤差被限幅器限定在±50 r/min范圍內,并最終在穩態時收斂于零。
另外,突然將額定負載反向加載,將導致轉子位置估算在暫態和穩態時分別產生誤差。速度和q軸電流增益將通過PSO在線調整。另外,本文提供了建立在dq軸電流基礎上的MTPA控制方法的效果。d軸電流指令通過q軸電流和最大電流計算獲得。在暫態情況下,q軸電流指令保持最大值,而d軸電流保持為0。在穩態情況下,d軸電流變成負值,以產生所期望的轉矩來克服負載轉矩,并采用最小的電流幅值。
在本文無傳感器控制策略中,利用PSO來動態調整PI控制器增益和固定PI控制器增益這兩種方法:輸入±750 r/min方波速度指令,并在穩態時突加±5 Nm負載在PMDC發電機端。兩種控制方式性能對比如圖3所示。
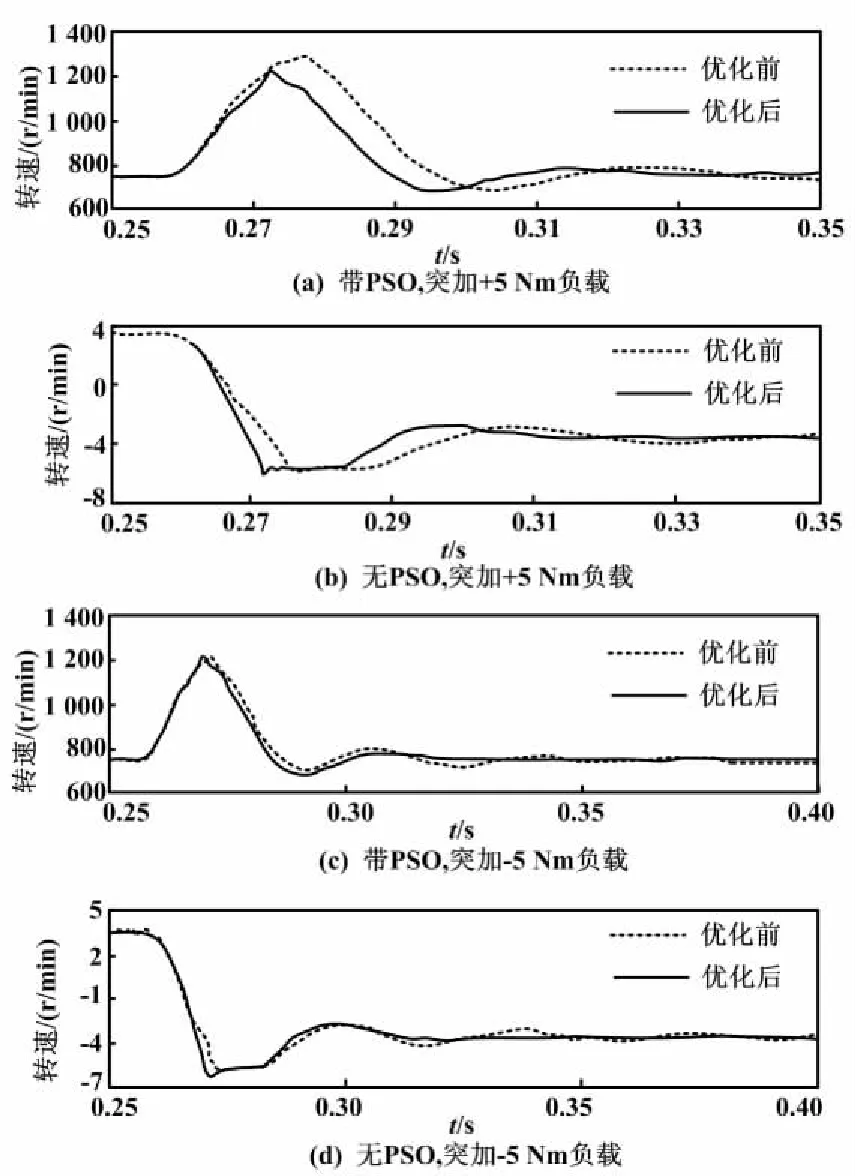
圖3 兩種控制方式性能對比
傳統的PI控制方法中,控制器的參數是離線調整完成的,并將對應系統最佳狀態時的PI參數固定下來。可以看出,固定PI參數和PSO在線調整PI參數方法,在通常情況下具有相似的速度和電流響應曲線。然而,利用PSO在線調整PI參數的方法還具有其他的優勢,即當系統受到負載擾動時,該方法具有更小的超調量、更快速的響應以及較少的波動量。在傳統的固定PI參數控制方案中,突加負載或負載突變時,系統的實際轉速往往會偏離速度指令值很多。這一情況可以通過采用在線PSO調整PI參數的方法來減輕。
圖3顯示了在較高頻通帶情況下,PSO和固定PI兩種方法的系統控制效果。為了增加控制器的帶寬,速度增益參數賦予新的數值(Kp_spd=6,Ki_spd=0.27)。可以看出,當采用傳統固定PI參數控制方法,手動調整賦予新的參數后,速度響應的超調量有所減小。然而,系統穩態響應中電流和速度波形中的抖動和脈沖有所增大,這將導致轉矩波動,增加系統噪聲并增大電機損耗。
5 結束語
本文提出了在線粒子群優化PI控制器參數的方法,并將其應用到PMSM無傳感器磁場定向驅動系統中;同時,也考慮到了定子參數電阻值的變化對無傳器控制系統速度估算的影響。其中,驅動系統的速度和電流控制器參數的優化和更新在一個采樣周期內全部完成。試驗證明,采用在線粒子群優化控制器的方法,使得IPMSM無傳感器驅動系統無論在動態特性還是靜態特性方面都優于傳統PI控制方法。另外,定子電阻的變化也通過自適應觀測器進行了補償修正。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34