徠卡RTC360三維激光掃描儀在竣工測量中的應用
2019-10-28 08:30:54汪曉慧吳曉培
測繪通報 2019年10期
汪曉慧,吳曉培
(浙江省測繪大隊,浙江 杭州 310030)
隨著科學技術、計算機技術的快速發展,測繪科學技術也發生了巨大的變化,三維激光掃描技術已經逐步應用于三維建模、變形監測等領域[1-2]。傳統的三維激光掃描技術存在點云數據量大、點云拼接過于繁瑣等問題,計算機技術的發展,為點云大數據處理提供了平臺,新型點云自動拼接三維激光掃描儀的出現,解決了點云拼接問題,使得三維激光掃描儀能快速應用于測繪領域[3-6]。三維激光掃描技術被稱為“實景復制技術”,其能快速獲得原始的測繪數據,并完整、高精度地重建實體,地面三維激光掃描將傳統的點測量發展為面測量,可以高效率、高質量、低成本地獲取海量的空間數據,充分體現測量目標的特征信息[7-8]。
本文采用徠卡RTC360三維激光掃描儀快速獲取工程實例的三維激光點云數據,原始點云經智能拼接處理生成點云模型并繪制竣工圖,經過驗證比對,精度符合規范要求,充分顯示了徠卡RTC360三維激光掃描儀的技術優勢。
1 設備簡介
1.1 儀器結構組成
儀器由三維激光掃描頭、3個HDR相機和內置慣導系統3個部分組成,還配置了工作時架放儀器的三腳架和方便查看數據的平板電腦,腳架每邊分為四節,可根據高度需求自由縮放;外業數據采集時可通過平板電腦實時查看數據和作業時間。
1.2 核心技術
RTC360三維激光掃描儀融合了徠卡三大核心先進技術:TruRTC實景復制技術、VIS視覺追蹤技術、SmartReg智能拼接技術,使RTC360三維激光掃描儀與徠卡FIELD 360外業操控軟件、REGISTER 360智能拼接軟件完美結合,設備輕便,操作簡單,是一套集智能、簡單、高效、極速于一體的三維激光掃描儀。
(1)TruRTC實景復制技術:RTC360內置3個相機,單鏡頭時可達1200萬像素,全景照片時可達4.32億像素,成像質量高,現場細節更加逼真,HDR全景照片采集時間僅需1 min,不受環境光源影像,滿足了不同場景的照片采集。
(2)VIS視覺追蹤技術:VIS通過5個內置相機和IMU實時計算出連續兩個站的相對位置,供精準的點云拼接,整個過程中無需標靶,無需公共點,無需人工干預,全自動操作,實現智能化拼接,簡單高效。
(3)SmartReg智能拼接技術:Field360 App現場實時預拼點云數據,提高點云拼接速度與精度;Register360一鍵導入點云數據,全自動化拼接,簡化內業數據處理流程,工作更高效。
1.3 主要性能
RTC360掃描儀具有全方位視角掃描、速度快、精度高的特點,擁有3600×3000的掃描視場角,130 m的有效范圍,掃描速率高達2 000 000點/s,最高點位精度達到1.9 mm,HDR相機單鏡頭時達到3600萬像素,具有一塊電池達到4 h的超長蓄電能力,視覺追蹤技術實時跟蹤計算前一站的相對位置,保證了點云的自動拼接功能。
2 作業流程
采用RTC360三維激光掃描儀進行竣工測量主要是以內業為主、外業為輔的作業模式,其作業過程包括外業實地點云數據采集、數據處理和數據測圖3大部分,如圖1所示。
2.1 數據采集
外業數據采集分為前期路線規劃、現場數據采集和采集數據檢查3個步驟。前期通過對測區周邊地形情況的了解,初步規劃好架設站點位置;根據規劃好的路線和實際現場情況逐站進行掃描,掃描過程中根據項目要求設置好相應的采集參數,在掃描過程中點的密度分為高、中和低3個等級,可根據項目要求和掃面對象的復雜程度自主選擇,每站掃描完成直接搬站,無需對中整平等煩瑣步驟;每站數據采集完成可通過外業操控平板電腦對數據質量進行檢查,數據采集完成可對整條采集路線數據進行檢查。
2.2 點云數據處理
點云處理分為數據預處理、點云拼接、控制點導入、點云去噪和數據輸出5部分,點云數據處理是在Cyclone軟件中進行的,軟件數據是通過數據庫的方式進行處理的;點云的拼接是通過一定的約束條件將多站點掃描數據配準到統一坐標系中的過程,拼接完成之后將得到一個項目的完整點云,通過旋轉和平移的方法對有重合的兩站點云進行拼接,主要有基于標靶的拼接和基于點云視圖的拼接兩種方法;點云拼接完成且拼接誤差合格后加入控制點得到絕對坐標,然后通過相應的去噪功能進行點云去噪,分為整體去噪和局部去噪兩種方式,軟件點云輸出包括LAS、RCP和E57等多種格式。
2.3 模型精度檢查及點云模型測圖
對生成的點云模型中均勻分布的地物點對模型精度進行檢查,模型精度合格方能進行點云模型測圖。點云模型測圖主要是在CloudWorx for AutoCAD軟件進行的,軟件通過讀取Cyclone軟件服務器中的數據,在AutoCAD繪圖軟件中支持海量的掃描點云數據,AutoCAD軟件強大的繪圖功能與精確的點云數據相結合,可繪制各種線畫圖,并提取物體的各特征要素,同時還可以兼容南方CASS繪圖軟件,直接繪制地物并添加屬性。
2.4 外業精度檢查
竣工圖測繪完成后通過野外進行調繪對遮擋和錯誤表示的要素進行補測修改,圖面整飾完成后從圖中抽取均勻分布的主要地物點進行精度檢查。
3 項目應用
3.1 試驗測區概括
試驗項目位于浙江省臺州市椒江區某地的拆遷安置房,整個試驗測區面積約0.05 km2,如圖2所示。由于是剛建好的拆遷安置房,測區主要以房屋和道路為主,植被主要是低矮的綠化,基本沒有高大的樹木,因此存在的遮擋情況較小,比較適合利用三維激光掃描儀進行點云建模。
3.2 數據采集
本次數據采集共架設了62站,采用低密度的掃描方式,分別架設在分岔路口和房屋之間有空隙的區域,在保證能全方位無死角的掃描到測區每個區域的情況下,盡量減少數據冗余。以圓形標靶的形式測繪了10個控制點,每個控制點分別以不同的時段測量了兩次,每次測量不超過兩個測回,每個測回平面誤差不差過2 cm,高程誤差不超過3 cm,以保證控制點的精度。
3.3 數據處理
采集的點云導入Cyclone軟件中進行處理,由于RTC掃描儀具有自動拼接功能,因此采用基于點云視圖的方法進行拼接,由平面視圖和高程視圖兩部分組成,部分拼接視圖如圖3和圖4所示。拼接過程中連續的相鄰兩站一般不需要人工干預,只要通過對其進行檢查對局部沒有拼接到位的細微區域進行精細化調整,由于VIS視覺追蹤技術實時計算相鄰兩站有一定的時間限制,針對相隔時間較久的相鄰兩站需要進行人工拼接。從圖5整個試驗區域的拼接報告中可以看出,最大的拼接誤差為24 mm,最小的為10 mm,符合拼接要求,即可生成點云模型,通過在模型上添加標靶控制點,導入坐標信息進行絕對定向,得到相應坐標系的點云模型。如圖6所示。
3.4 基于點云模型的竣工圖測繪
(1)立面圖:在CloudWorx for AutoCAD軟件中通過坐標轉換后的點云立面切片,根據點云紋理繪制立面圖,如圖7所示。在每部分繪制過程中,通過點云刷新系統會根據電腦配置顯示相應密度的點云,對于點云模糊不清的區域,可根據高清全景照片查看模糊細節。繪制完畢后關閉點云數據,即可獲得立面圖,如圖8所示。
(2)竣工地形圖:繪制房屋、電桿等立體地物時,在CloudWorx for AutoCAD軟件中以高程視角找到相應高度的位置和厚度進行切片剪裁,切換到平面視角進行繪制。在點云切片面可根據地物特征進行矢量數據采集,可直接調用南方CASS作圖軟件中的相應地物進行繪制,通過點云刷新,系統會根據電腦配置顯示相應密度的點云,對于點云模糊不清的區域,可根據高清全景照片查看模糊細節。每一個切片對應的地物繪制完畢后,可在剪切管理器中將切片刪除,再重新根據繪制地物對象剪切相應的切片。全部數據采集完成后直接將點云數據關閉,即可獲得相應的矢量地形圖。
3.5 成果精度評定
為了檢驗點云模型測量立面圖和矢量地形圖的精度,采用鋼卷尺量測了一些窗戶和門的寬度和高度,并用TS02全站儀均勻測量了棱角分明的特征點,主要是精度要求較高的房角點,以實地量測的坐標作為點云模型測量地形圖的檢查點。通過式(1)計算檢查點和模型上采集數據的平面中誤差和高程中誤差,驗證基于點云模型矢量化地形圖的精度[9]。

(1)
3.5.1 立面精度分析
立面測繪精度主要以測區西北面幾幢房屋的立面測繪圖作為依據,測繪了每幢房屋4個面的立面效果圖,外業分別測量了窗戶、門和墻體的寬和高進行對比,另外還測量了一些明顯的地物加入相對寬度的對比,并生成相對誤差精度分布圖,如表1、圖9所示。

表1 立面相對精度統計 m
通過表1可知,中誤差為0.015 m,其中最大誤差為0.029 m,最小誤差為0。通過圖9可知,相對精度誤差主要分布在-0.01~0.02 m之間,符合立面精度要求。
3.5.2 矢量地形圖精度分析
為了檢測在點云模型上矢量化的地形圖的精度,以臺州市某個拆遷安置房掃描的點云模型作為檢測對象,實地測量了72個平面檢查點,12個高程檢查點,對點云矢量測圖精度進行檢測,如表2、圖10所示。
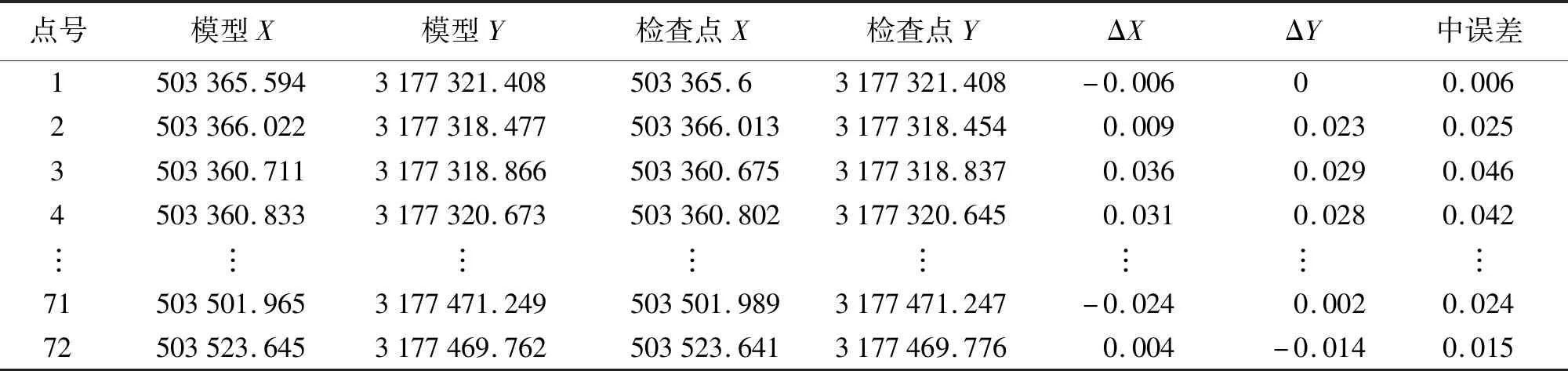
表2 矢量地形圖平面精度統計 m
從表2中可知,單個點位誤差最大為0.056 m,最小為0.006 m,點位中誤差為0.028 m。從圖10中可知,單個點位誤差大于0.05 m的有2個,超出限差范圍率為3%,平面精度基本分布在0~0.03 m之間,符合1∶500地形圖的平面精度要求。

表3 高程精度統計 m
可計算出高程中誤差為0.016 m,從表3可得,最大高程誤差為0.027 m,最小為0.002 m;從圖11可知,高程誤差基本分布在-0.01~0.02 m之間,沒有超過精度誤差要求,完全符合1∶500地形圖高程精度要求。
4 結 語
徠卡RTC360三維激光掃描儀精度相對較高,操作簡單方便,自動拼接點云功能,高清的全景照片。在本次的立面和竣工地形圖的測繪試驗中,立面相對誤差0.015 m,完全符合立面測繪的精度要求;矢量地形圖的平面中誤差0.028 m,高程中誤差0.016 m,符合竣工測繪要求。在試驗過程中也存在一些問題,掃描過程中每個角落、每個拐角都要進行搬站掃描,不適用大面積的地形測繪;掃描的有效距離為130 m,也限制了應用于一些高樓的點云掃描,只能適用于一些中低樓的掃描;在掃描過程中存在頂部為掃描的盲區,因此在建立的點云模型中頂部沒有點云,完整的點云模型還需要后期無人機等設備的補充。在測繪地理信息行業的應用中,RTC360掃描儀適用于低層樓的高精度立面測繪、小面積的竣工測繪、紋理復雜的三維建模和復雜管線的三維建模等高精度且復雜的三維建模,為無信號的隱蔽空間提供了建立三維模型的可能,為智慧城市提供了地面和地下三維模型的完整性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
光學精密工程(2016年6期)2016-11-07 09:07:19
衛星與網絡(2015年12期)2015-10-27 02:21:46