比人類更聰明
2019-10-30 03:45:31技術宅
電腦愛好者 2019年2期
技術宅

無人駕駛的歷史
無人駕駛技術其實很早就已出現,早在1925年8月,美國街頭就首次出現了一輛“貌似”無人駕駛的汽車,一位名叫Francis P.Houdina的美國陸軍電子工程師,通過發射無線電波控制一輛汽車行駛,這可能是最早的無人駕駛概念車了(圖1)。
隨著科學技術的發展,特別是Al技術的發展,越來越多的科技巨頭參與到無人駕駛技術的開發中。2015年,谷歌第一輛原型汽車正式亮相,并且正式上路測試,測試過程中這輛汽車可以自動避讓行人,智能識別交通信號燈,自動和迎面而來的其他車輛交會等,就像一位技術精湛的老司機在開車(圖2)。2018年,無人駕駛技術進一步發展,整合Al技術的無人駕駛更是如虎添翼,駕駛水平得到進一步提高。

無人駕駛中的AI
上文我們介紹了無人駕駛汽車可以自動避讓、交會和識別信號燈等,那么在整個駕駛行程中,Al在其中究竟扮演了什么角色?
大家知道,無人駕駛汽車要自由地在公路上行駛,就必須對汽車進行精準定位和控制。常規的定位是使用無人汽車上光學雷達和攝像頭所獲取的數據,然后通過一定的算法在地圖上實現對汽車的定位。但是由于無人駕駛汽車需要在復雜的地理環境和不斷變化的街道中行駛,這就要求駕駛系統有很好的感知及決策能力,顯然這本身就具有非常大的不確定性(圖3)。
為了實現更精準的定位和更高智能的決策,科學家使用Al的深度學習來解決這個問題,他們并不像傳統深度學習模型那樣先預設算法,而是為無人駕駛系統準備大量的實例。一方面,駕駛系統通過學習大量實例掌握更多復雜路況的駕駛技術和決策能力;另一方面,借助Al的自主學習能力,通過對實例的學習和不斷的自我糾錯,達到自我提高。整個過程類似于經驗豐富并且勤學好問的老司機,他們可以通過和其他同行的交流、學習來提高自己的駕駛水平,以及應對各種路面突發情況的處理能力(圖4)。

與此同時,科研人員還利用“多任務深度學習”對駕駛系統進行深度訓練。在這個訓練中,科研人員讓駕駛系統同時識別車道標志線、汽車以及行人,并且借助Al的CNN(Convolutional Neural Network,卷積神經網絡)技術進一步提高無人駕駛系統的識別和判斷能力。
通過上述的深度學習后,現在的無人駕駛技術已經不用完全依賴預先設定的地圖了,而只是將地圖作為其中的一個數據流,同時結合傳感器獲取的數據幫助系統進行決策。比如,神經網絡系統通過地圖信息可以預先知道下一個路段的人行橫道的信息,再借助攝像頭實時捕獲的橫穿人行道的行人信息,駕駛系統就可以據此作出更好的決策,或停車禮讓行人,或正常通過人行橫道等。借助“多任務深度學習”Al的神經網絡,不需要再從原始像素圖中提取車道信息、交通標識及車輛行人標識了,這一切都交給神經網絡自動識別,最后只是輸出簡單的剎車、轉向、避讓等指令讓無人駕駛系統執行即可(圖5)。

當然Al在無人駕駛技術中還有很多的應用。比如通過Al深度學習讓駕駛系統學習很多人類的駕駛方式及技巧,從而讓乘客感覺是一位經驗豐富的老司機在開車,從而提高乘車體驗。此外它也類似全局導航路徑規劃、局部環境地圖三維構建、車輛的智能調配等。
無人駕駛改變你我的生活
通過上述的介紹,我們知道利用Al技術的無人駕駛汽車不僅可以提高無人駕駛的安全性,而且可以應對更復雜的路況和擁有比人類更優秀的決策能力。這不僅對廠商來說增加了很多賣點,而且對于普通用戶來說也有很大的意義。
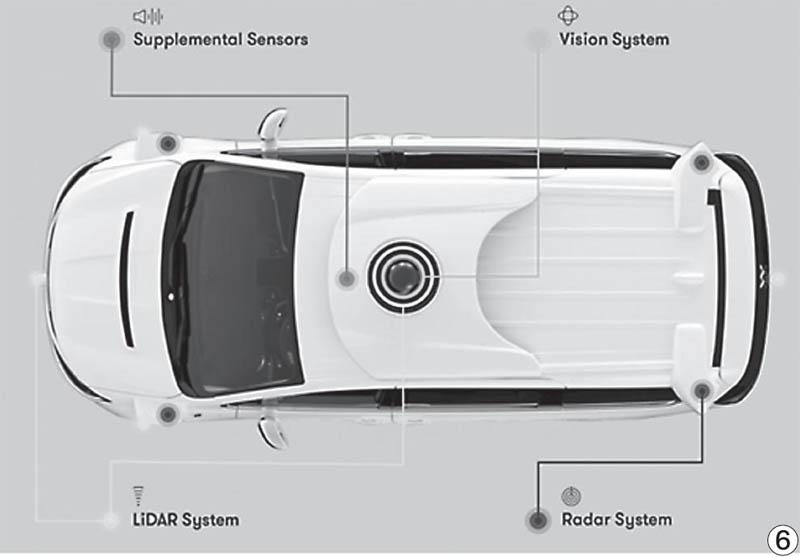
有統計數據顯示,全世界每年有120萬人死于汽車或與交通相關的事故,其中有93%是人為失誤造成。無人駕駛汽車充分利用Al技術,正好可以減少那些由于人為馬虎大意引起的失誤而導致的交通事故,從而也就減少了人員傷亡。以測試了8年之久的谷歌Waymo無人駕駛汽車為例,期間駕駛了300多萬公里,只發生了十幾起輕微事故(圖6)。雖然2018年5月谷歌Waymo無人駕駛汽車在美國發生了一起車禍,不過值得注意的是,Waymo無人駕駛汽車并不是肇事方,而是事故受害者。
無人駕駛技術的普及無疑也為普通人的出行帶來更多的便利,當整個無人駕駛技術成熟地運用到公共交通系統中時,一切的交通會在一個系統中統一調度,這樣無論你在什么地方、什么時候打車,無人駕駛車輛都會根據自動調度為你提供最好的服務。
當然了,無人駕駛技術還有很多的應用,比如我們開到目的地后就無需再考慮停車這個老大難的問題,它會自動幫助我們去找停車位等等。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
