淺談無人機航測技術在地形測繪中的應用
2019-10-31 07:00:03劉健唐毅然張新一
電腦知識與技術 2019年22期
劉健 唐毅然 張新一

摘要:隨著城市建設的發展,無人機航測技術得到了廣泛應用。無人機航測技術成本低、工期短、精度高,能夠大幅度減少外業工作量,進而提高生產效率,縮短工期。
關鍵詞:無人機;航測技術;地形測繪
中圖分類號:TP311? ? ? 文獻標識碼:A
文章編號:1009-3044(2019)22-0252-02
開放科學(資源服務)標識碼(OSID):
1 概述
近年來,隨著城市建設的發展,對大比例尺地形圖的需求日益增大,無人機航測技術得到了廣泛應用。無人機航測技術具有機動靈活、經濟便捷等特點,而且能夠方便地獲取高分辨率影像,因而采用無人機航測技術成本低、工期短、精度高,能夠大幅度減少外業工作量,進而提高生產效率,縮短工期。
2 無人機航攝系統
無人機航攝系統一般由飛行平臺、任務裝置、地面控制站、發射與回收系統組成,本項目測區采用廣州中海達測繪科技有限公司生產的iFly-D1四旋翼無人機,航測模塊搭載Q5mini 傾斜攝影儀,飛控系統采用STE-無人機飛控實時操作系統以及Smart3d三維數據處理軟件和Eps繪圖軟件。
3 無人機航測作業流程
無人機航測作業流程主要分為外業測量和內業數據處理兩大部分。外業測量包括:1)資料收集,確定測區范圍;2)施測范圍航攝參數計算,規劃航線;3)像控點布設與測設;4)無人機影像獲取。內業數據處理包括:①空三加密;②DOM、DSM生產;③裸眼繪圖;④DLG生產;⑤編輯成圖;⑥數據檢查驗收。
4 項目概述
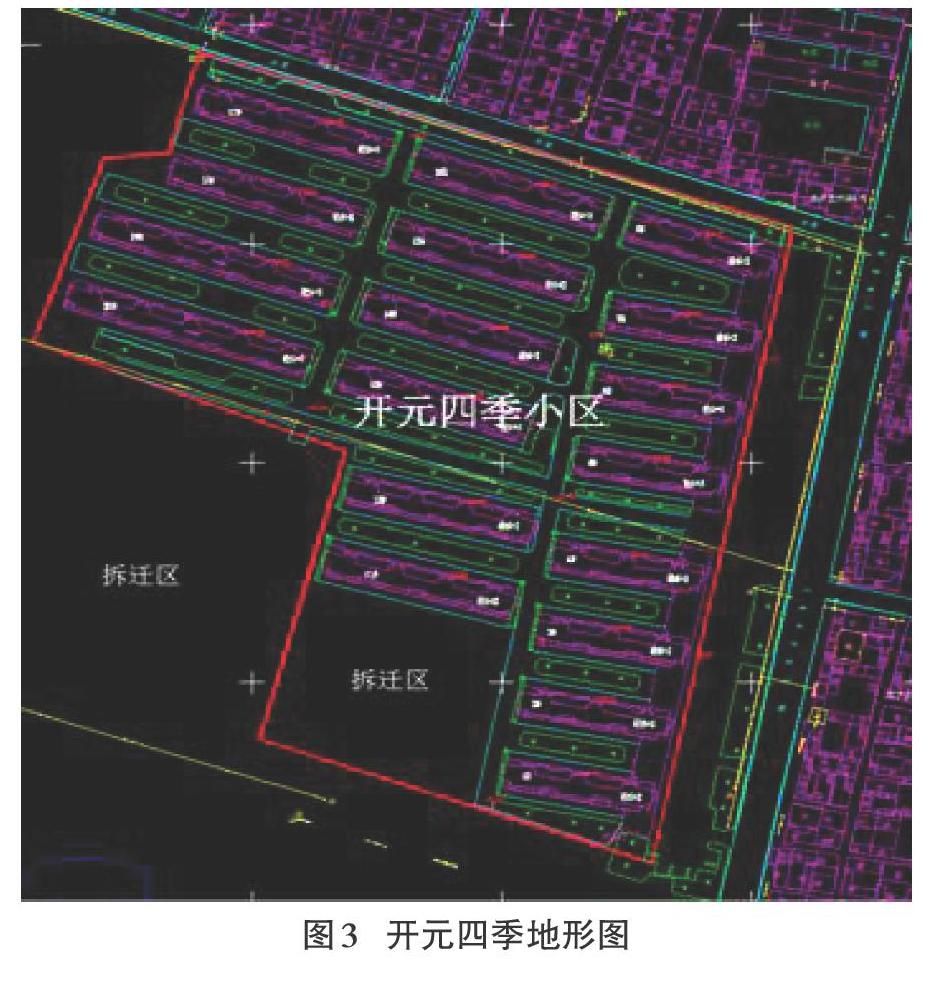
山東省蘭陵縣開元四季小區竣工核實需要進行1:500地形圖測繪,等高距1米,成圖面積約0.2km?,0.05m 分辨率的DOM航測面積約0.2km?。測區相對高差約47.20米,地形為平原地帶,平面坐標系統為1980西安坐標系,高程基準為1985國家高程基準。
5 實際作業流程
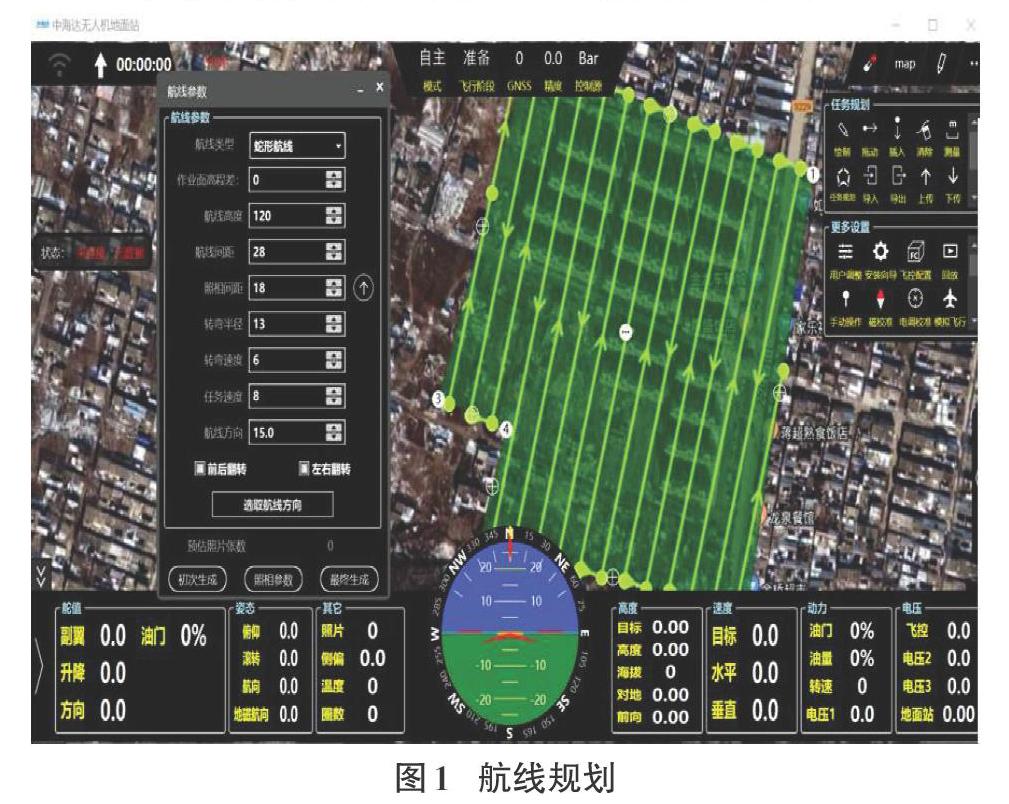
5.1 測區范圍航線規劃
因測區范圍較小,測區不需分塊,設置航向和旁向重疊度均設置為75%,相對航高120米,地面分辨率約0.05m,共獲取5000張影像,實際飛行30分鐘,共1個架次。見下圖:
5.2 像控點與檢查點布設與施測
在區塊中,航線參數設置后,我們根據無人機管家軟件內置的谷歌影像同時布設像控點,共布設了4個像控點,1個檢查點,同時在手機奧維APP中標記上像控點與檢查點,外業布點時就利用手機版奧維進行導航定位,到達點位后采用GPS-RTK進行像控點與檢查點的施測。
5.3 外業航飛
飛機做好起飛檢查后飛機起飛,飛行完畢后及時下載POS數據,基站數據,檢查照片數跟pos數據是否一致,檢查照片是否漏片,是否存在質量問題,檢查完后轉入內業處理環節。
5.4 內業照片導入及POS數據整理
5.5 Smart3d空三加密
將獲取的照片和POS數據導入Smart3d進行空三加密,空三報告精度達到要求后導出空三成果。
5.6 Smart3d建模
在Smart3d中導入獲得的空三成果進行三維建模,輸出OSGB格式的文件,之后生成三維模型。
5.7 Eps裸眼立體采集,編輯成圖
在Eps中,將獲取的OSGB格式的文件生成傾斜模型,然后加載生成的傾斜模型進行裸眼立體采集,最后編輯成圖。
6 問題與分析
在大比例尺地形圖的生產中,無人機航測產生的效益相對于傳統人工測繪來說是很顯而易見的,但是傳統航測的生產方法存在一定的弊端,傳統航測生產DLG是基于正射影像的基礎上進行立體采集,采集窗口聯動性差,需要佩戴立體眼鏡,同時手輪腳盤要相互配合好,不容易上手, 培訓周期長,建筑物密集區域還需要進行大量的房檐改正等外業調繪工作。在本案例中,提出了外業采用正射補飛傾斜航拍(建筑物密集區域)的手段,內業采用Smart3d做空三加密,然后導出空三成果到Smart3d進行三維建模,最后用Eps進行裸眼立體采集和內業編輯處理成圖。這種作業方式上手快,效率高,減少了外業調繪工作中房檐改正的環節,也減少了因房檐改正引起的誤差。
參考文獻:
[1] 天津騰云智航科技有限公司.產品應用手冊[Z].
【通聯編輯:李雅琪】
猜你喜歡
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
中國化肥信息(2020年7期)2020-03-19 01:54:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國軍轉民(2017年6期)2018-01-31 02:22:28
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年12期)2015-10-27 02:21:46
汽車零部件(2014年11期)2014-09-18 11:57:16
