基于模糊PID控制的外腔半導體激光穩頻系統研究
2019-11-01 05:48:30汪洋汪宇航蘇穎張倩程育昊
上海師范大學學報·自然科學版 2019年4期
汪洋 汪宇航 蘇穎 張倩 程育昊
摘 要: 研究了一套基于模糊比例、積分、微分(PID)控制算法的外腔半導體激光器穩頻系統,能夠根據外界環境的變化,自動調節參數.通過Matlab軟件進行建模和仿真,證明了該方法的有效性.
關鍵詞: 外腔半導體激光器; 模糊比例、積分、微分(PID)控制算法; 穩頻
中圖分類號: TN 248? 文獻標志碼: A? 文章編號: 10005137(2019)04038304
Abstract: A fuzzy proportion,integral,differential(PID) control algorithm was proposed for the external cavity laser to achieve better frequency stability.The Matlab stimulation results demonstrated that the fuzzy PID control algorithm performed more effectively for the frequency control of external cavity laser.
Key words: external cavity laser; fuzzy proportion,integral,differential(PID) control algorithm; frequency stabilization
0 引 言
由于外腔半導體激光器能夠輸出相對穩定的頻率,在多數光學實驗中常常被作為穩定的光源,確保光學實驗的準確性.然而外界大氣的變化、腔體內部溫度的變化、注入電流的變化以及外界振動等,都會影響外腔半導體激光器長期輸出穩定的頻率,從而出現頻率漂移現象[1].
目前,國內外在穩頻的研究方面獲得了許多成果.較為成熟實用的穩頻方法可分為:直接電控穩頻、光反饋穩頻以及混合穩頻[2].此外,還包括一些新的方法,如:利用泵浦電流的周期性進行時空調制[3],以及將外腔半導體激光器非均勻地集成到芯片中[4].
基于傳統比例、積分、微分(PID)控制算法通過提前設定參數以及計算誤差信號實現反饋調節[5].然而,傳統的PID控制算法的執行效率較低.模糊PID控制算法是改進了傳統的PID控制算法,通過引入模糊邏輯算法,使參數能夠隨外界環境的變化而自動調節,具有自適應的特點.本文作者在現有外腔半導體激光器PID穩頻的基礎上,創新性地引入模糊控制算法,從而提高了外腔半導體激光器的穩頻性能.
1 系統模型
1.1 系統結構模型
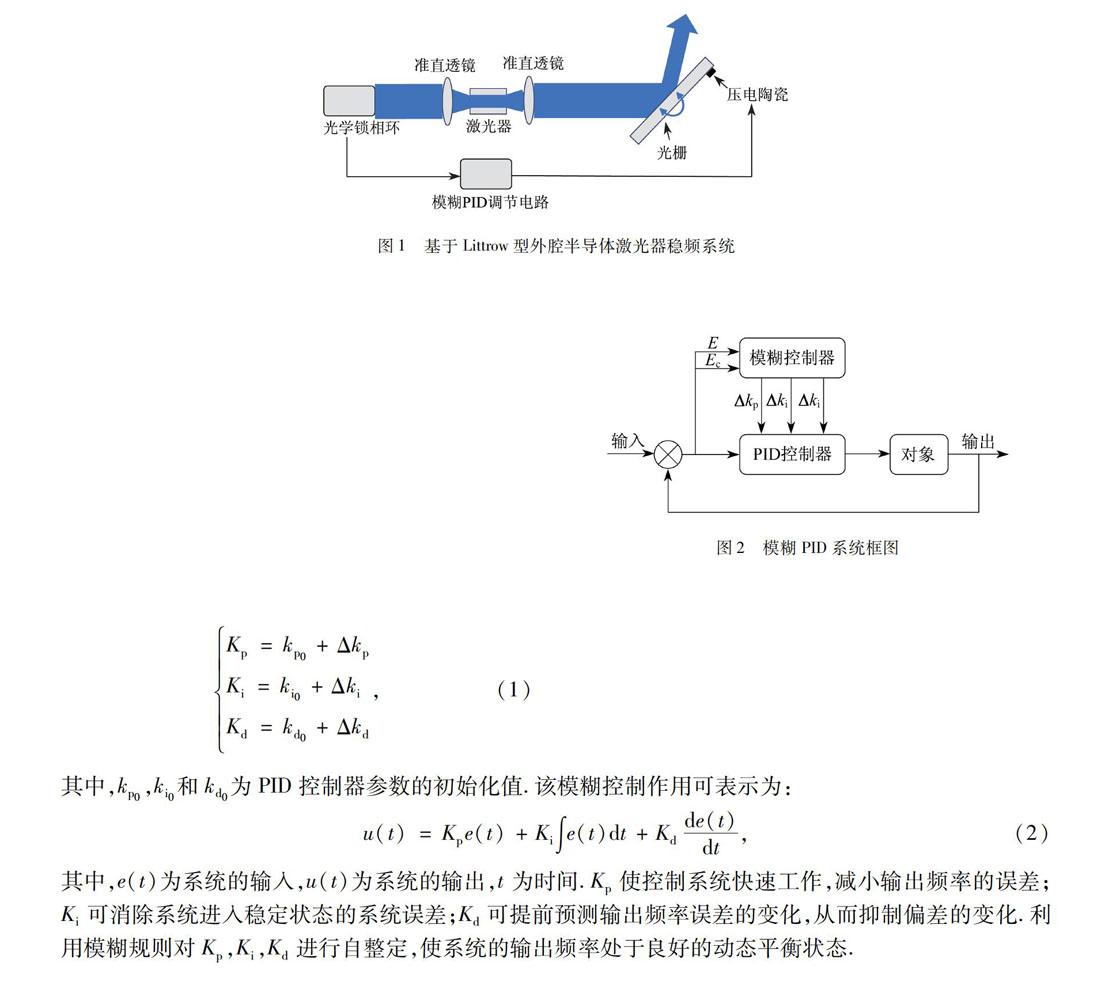
根據外腔半導體激光器衍射光柵的種類不同可分為Littrow結構和Littman結構[6].對于Littrow型外腔,當衍射光柵有微小的轉動時,輸出光的方向也會隨光柵的轉動而改變.由于 Littrow結構簡單易實現,通常被用于光學實驗.本研究的外腔半導體激光器穩頻系統由基本的Littrow結構、光學鎖相環以及模糊PID調節電路組成,如圖1所示.光學鎖相環將光柵的反射光頻率與預設定的光頻率進行比較,把頻率差值送入模糊PID調節電路.調節電路的輸出信號來控制壓電陶瓷,使其產生位移,進而改變光柵的角度,實現激光的穩頻.
1.2 模糊PID控制算法
2 仿真結果
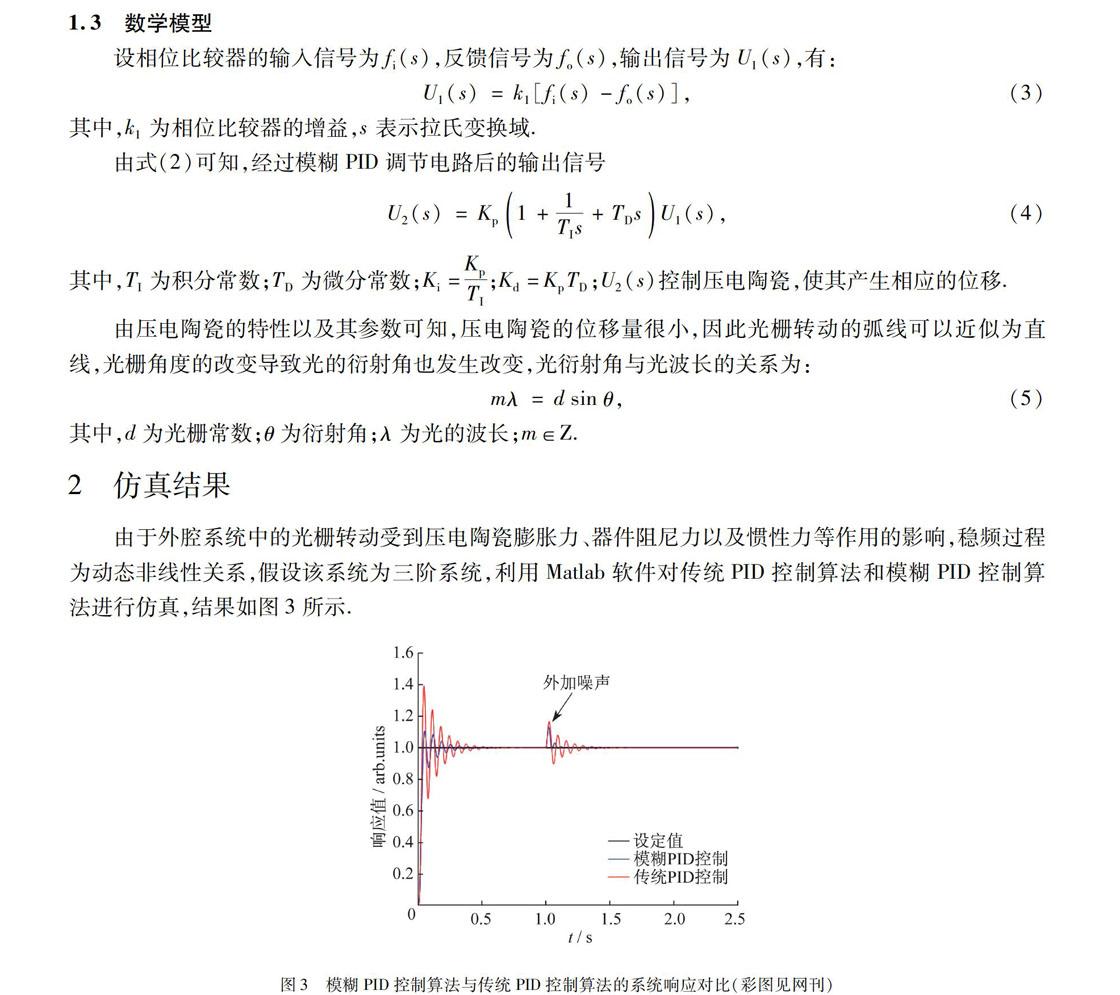
由于外腔系統中的光柵轉動受到壓電陶瓷膨脹力、器件阻尼力以及慣性力等作用的影響,穩頻過程為動態非線性關系,假設該系統為三階系統,利用Matlab軟件對傳統PID控制算法和模糊PID控制算法進行仿真,結果如圖3所示.
圖3中,紅色曲線代表傳統PID控制算法的外腔半導體激光器系統響應,藍色曲線代表模糊PID控制算法的外腔半導體激光器系統響應.分析藍色曲線可知:起初系統輸出頻率一直小于設定值,初始誤差較大,因此取較大的Kp和較小Ki,Kd,以加快系統的響應速度.當系統輸出快要到達設定的頻率值時,減小Kp,增大Kd,抑制超調的產生.當系統出現正向超調并且輸出頻率持續增大時,取較小的Ki和較大的Kd,使輸出頻率盡快回落.當系統的輸出頻率開始減小并再次趨向設定值時,增大Kd來抑制負方向的超調.當系統出現負向超調并且超調持續增大時,繼續增大Kd.當負向超調開始減小時,應當減小Kd,增大Kp,加快系統響應速度.如此重復上述操作,可使系統快速趨于穩定.
對比紅、藍兩條曲線可知:模糊PID控制算法比傳統PID控制算法的超調量小,而且系統能更快到達所設定的穩定狀態.當系統達到穩定后,增加一個微小的干擾噪聲來測試兩種算法的抗干擾能力.由圖3可知:在外加噪聲的干擾下,基于模糊PID控制算法比基于傳統PID控制算法的系統的超調量小,且恢復穩定狀態所需的時間也更短.
3 結 論
本文作者研究了基于模糊PID控制算法的外腔半導體激光穩頻方法,該方法具備超調量低、調節時間短、曲線平滑、穩健性好等優點.同時模糊PID控制算法可以更好地抑制因外界環境的微小干擾所導致的激光器頻率漂移現象,是外腔半導體激光穩頻的理想控制算法,該方法對外腔半導體激光器的應用具有一定價值.
參考文獻:
[1] 陳長水,王芳,劉頌豪,等.半導體激光器穩頻技術綜述 [J].量子電子學報,2010,27(5):513-521.
CHEN C S,WANG F,LIU S H,et al.Summary of frequency stabilization technology for semiconductor lasers [J].Journal of Quantum Electronics,2010,27(5):513-521.
[2] 鄭甜美,袁其平,童崢嶸,等.半導體激光器穩頻技術的研究進展 [J].光通信技術,2011,35(4):30-33.
ZHENG T M,YUAN Q P,TONG Z R,et al.Research progress of frequency stabilization technology for semiconductor lasers [J].Optical Communication Technology,2011,35(4):30-33.
[3] AHMED W W,KUMAR S,HERRERO R,et al.Stabilization of flatmirror verticalexternalcavity surfaceemitting lasers by spatiotemporal modulation of the pump profile [J].Physical Review A,2015,92(4):1-8.
[4] LIANG W,ILCHENKO V S,ELIYAHU D,et al.Ultralow noise miniature external cavity semiconductor laser [J].Nature Communication,2015(24):1-6.
[5] 孟祥然.基于PID控制的激光器穩頻實驗研究 [J].科技信息,2013(16):66-67.
MENG X R.Experimental study on frequency stabilization of laser based on PID control [J].Science and Technology Information,2013(16):66-67.
[6] 孫黎,半導體激光器穩頻方法的對比研究 [D].太原:中北大學,2015.
SUN L.A comparative study of frequency stabilization methods for semiconductor lasers [D].Taiyuan:North University of China,2015.
[7] 蘇興華.基于模糊控制理論的PID控制器設計 [J].中國管理信息化,2019,22(3):136-139.
SU X H.Design of PID controller based on fuzzy control theory [J].China Management Informationization,2019,22(3):136-139.
[8] 袁秀平,李鶴一.基于MATLAB的電液伺服系統自適應模糊PID仿真 [J].上海師范大學學報(自然科學版),2006,35(3):43-46.
YUAN X P,LI H Y.MATLABbased electrohydraulic servo system adaptive fuzzy PID simulation [J].Journal of Shanghai Normal University (Natural Sciences),2006,35(3):43-46.
(責任編輯:包震宇)
