開(kāi)鏈?zhǔn)蕉噙B桿機(jī)構(gòu)的逆運(yùn)動(dòng)學(xué)求解算法
2019-11-03 14:07:16康凱劉婷婷王二建李紅艷朱國(guó)權(quán)周建新
電腦知識(shí)與技術(shù) 2019年23期
康凱 劉婷婷 王二建 李紅艷 朱國(guó)權(quán) 周建新

摘要:在D-H坐標(biāo)系下,建立普適的開(kāi)鏈?zhǔn)蕉噙B桿機(jī)構(gòu)的正運(yùn)動(dòng)學(xué)模型較易,但建立通用的逆運(yùn)動(dòng)學(xué)模型卻相當(dāng)困難,并且其復(fù)雜程度隨著關(guān)節(jié)個(gè)數(shù)的增多而顯著增大。為此,結(jié)合粒子群優(yōu)化算法(PSO),通過(guò)迭代的方式求解逆運(yùn)動(dòng)學(xué)問(wèn)題。針對(duì)PSO算法求解時(shí)的精度不高、易陷入局部極值的缺點(diǎn),提出局部搜索策略,提高解的精度,并采用逃逸策略保證種群多樣性,使算法在全局中搜索。經(jīng)驗(yàn)證,改進(jìn)后的PSO算法是一種精確、有效的求解逆運(yùn)動(dòng)學(xué)的算法。
關(guān)鍵詞:逆運(yùn)動(dòng)學(xué);粒子群優(yōu)化算法;局部搜索;逃逸策略
中圖分類(lèi)號(hào):G242? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1009-3044(2019)23-0209-04
開(kāi)放科學(xué)(資源服務(wù))標(biāo)識(shí)碼(OSID):
1 引言
開(kāi)鏈?zhǔn)蕉噙B桿機(jī)構(gòu)的逆運(yùn)動(dòng)學(xué)是指在給定末端操作器位姿的條件下求解各個(gè)關(guān)節(jié)變量的取值。逆運(yùn)動(dòng)學(xué)作為機(jī)器人軌跡規(guī)劃和軌跡控制的基礎(chǔ),是機(jī)器人學(xué)的關(guān)鍵部分。求解逆運(yùn)動(dòng)學(xué)問(wèn)題常采用封閉解法,其特點(diǎn)是編程實(shí)現(xiàn)簡(jiǎn)單,計(jì)算速度快,物理意義明確,并且可以找到所有可能的解[1]。但其在很大程度上受到機(jī)械結(jié)構(gòu)的限制,需要針對(duì)不同類(lèi)型結(jié)構(gòu)建立不同的模型。
粒子群優(yōu)化(Particle Swarm Optimization, PSO)是一種模擬鳥(niǎo)類(lèi)覓食行為的全局優(yōu)化算法,由Kennedy和Eberhart于1995年提出[2]。基于PSO算法的逆運(yùn)動(dòng)學(xué)求解,意在關(guān)節(jié)變量空間中搜索出最優(yōu)解。搜索過(guò)程僅依賴(lài)于正運(yùn)動(dòng)學(xué),而正運(yùn)動(dòng)學(xué)的計(jì)算是不受機(jī)構(gòu)的結(jié)構(gòu)限制。因此,PSO算法在求解逆運(yùn)動(dòng)學(xué)問(wèn)題上體現(xiàn)出較高的普適性[3]。
但是,PSO算法的結(jié)果不能達(dá)到理想的精度,需對(duì)每一代的最優(yōu)解增添一項(xiàng)局部搜索。此外,PSO算法對(duì)多峰值復(fù)雜函數(shù)搜索的效果不佳,易陷入局部最優(yōu)[4]。可引入逃逸策略后,增強(qiáng)了種群的多樣性,及時(shí)地跳出局部最優(yōu)。
2 問(wèn)題描述
逆運(yùn)動(dòng)學(xué)問(wèn)題的求解可轉(zhuǎn)化成式(1)的方式進(jìn)行描述:
[minfθθ∈SS=xlk≤θk≤uk,θ∈Rn,lk∈R,uk∈R,k=1,2,3,...,n] (1)
其中[S]是[n]維空間中的一個(gè)非空集合,[n]代表關(guān)節(jié)變量的個(gè)數(shù)。函數(shù)[fθ]是定義在[S]上的目標(biāo)函數(shù)。
如圖1所示,在笛卡爾坐標(biāo)系中,末端操作器位姿矩陣[W]表示為:
[W=NxOxAxPxNyOyAyPyNzOzAzPz0001=NOAP0001]? ? ? ? ? ? (2)
其中,[NOA]表示姿態(tài),[P]表示位置,目標(biāo)位姿矩陣設(shè)為[W?],則位置誤差為:
[εP=Pθ-P?Pθ-P?T]? ? ? ? ? ? ? ? ? ?(3)
姿態(tài)誤差為:
[εN=NθN?+OθO?+AθA?-12]? ? ? ? ? ? ? (4)
目標(biāo)函數(shù)寫(xiě)成:
[fθ=εP+εN]? ? ? ? ? ? ? ? ? ? ? ? ? (5)
[Pθ]、[Nθ]、[Oθ]、[Aθ]由正運(yùn)動(dòng)學(xué)方程求得。
3 逆運(yùn)動(dòng)學(xué)求解
3.1 基本粒子群算法
PSO算法源于對(duì)鳥(niǎo)群覓食行為的模擬,鳥(niǎo)群中的個(gè)體通過(guò)共享信息保持鳥(niǎo)群飛行的一致性。個(gè)體間的信息共享機(jī)制確保群體的運(yùn)動(dòng)產(chǎn)生從無(wú)序到有序的演變,這是PSO算法的基礎(chǔ)[4]。
在PSO算法中,每個(gè)粒子代表鳥(niǎo)群中的個(gè)體,其包含位置和速度兩種信息。每個(gè)粒子的位置代表著優(yōu)化問(wèn)題的一個(gè)解。粒子位置坐標(biāo)對(duì)應(yīng)目標(biāo)函數(shù)的值作為該粒子的適應(yīng)度,其決定粒子性能的優(yōu)劣。每個(gè)粒子的速度控制其飛行的方向和距離。在每次迭代中,粒子將當(dāng)前位置與自身發(fā)現(xiàn)的最好位置([pbest])和所有粒子發(fā)現(xiàn)的最好位置([gbest])做比較,更新自身的位置和速度[5]。
在逆運(yùn)動(dòng)學(xué)問(wèn)題中,設(shè)搜索空間[S]是[N]維,粒子的群體規(guī)模為[M],第[i]([i=1,2,...,M])個(gè)粒子的位置為[θi=θi1,θi2,...,θiN],其經(jīng)歷最好的位置為[pbesti=pbesti1,pbesti2,...,pbestiN],速度為[vi=vi1,vi2,...,viN],所有粒子發(fā)現(xiàn)的最好位置記為[gbest=gbest1,gbest2,...,gbestN]。
PSO算法的進(jìn)化方程為:
[vijt+1=wvijt+c1r1pbestij-θijt+c2r2gbestj-θijtθijt+1=θijt+vijt+1]? ? (6)
其中,[i=1,2,...,M][j=1,2,...,N],[t]表示迭代次數(shù),[w]為慣性權(quán)重決定繼承當(dāng)前速度的能力,[c1]、[c2]為學(xué)習(xí)因子決定粒子自我總結(jié)和向優(yōu)良個(gè)體學(xué)習(xí)的能力,[r1]、[r2]為[0,1]之間均勻分布的隨機(jī)數(shù)。
基本粒子群的算法步驟如下:
①隨機(jī)初始各粒子的位置和速度。
②計(jì)算各粒子的適應(yīng)度,將粒子[i]的位置存入[pbesti]中,將[pbest]的最好位置存儲(chǔ)在[gbest]中。
③采用(6)式更新粒子的位置和速度。
④計(jì)算各粒子的適應(yīng)度,若當(dāng)前粒子[i]的適應(yīng)度優(yōu)于[pbesti],更新[pbesti]。
⑤將[pbest]的最好位置存儲(chǔ)在[gbest]中。
⑥若[gbest]滿(mǎn)足精度要求或達(dá)到最大迭代次數(shù),算法結(jié)束,否則,返回③。
實(shí)際在更新粒子的位置時(shí),還應(yīng)考慮是否越界的問(wèn)題,即[θj]是否超出了第[j]維坐標(biāo)的范圍。若超出范圍,則將邊界值賦給[θj]。
3.2 改進(jìn)的粒子群算法
3.2.1 局部搜索
受慣性權(quán)重、學(xué)習(xí)因子等參數(shù)的影響粒子移動(dòng)步長(zhǎng)具有隨機(jī)性。因而,即便某個(gè)粒子進(jìn)入最優(yōu)解的勢(shì)力范圍內(nèi),也未必能夠精確地落在最優(yōu)解的位置,進(jìn)而影響到最優(yōu)解的精度。局部搜索用來(lái)改善當(dāng)前粒子的位置,即搜索粒子鄰域內(nèi)的更優(yōu)解。若存在更優(yōu)的位置,則用更優(yōu)的位置代替當(dāng)前的位置。
局部搜索的對(duì)象可以是整個(gè)種群,也可以只對(duì)當(dāng)前最優(yōu)粒子進(jìn)行局部搜索。在相同的種群規(guī)模和迭代次數(shù)的條件下,前者求解精度更高,而后者計(jì)算量小一些。考慮算法對(duì)時(shí)間的要求,本文采用后者的方式。
若在粒子鄰域內(nèi)盲目的搜索,勢(shì)必會(huì)影響算法的效率。沿著負(fù)梯度方向進(jìn)行搜索可以快速找到粒子鄰域內(nèi)極值點(diǎn),確保了算法的效率[6]。
下面討論目標(biāo)函數(shù)梯度的求解,在D-H坐標(biāo)中[7],末端操作器的位姿矩陣由變換矩陣[Ai]連乘得到如式(8)所示,變換矩陣[Ai]表示成如下的形式:
[Ai=cosθi-sinθicosαisinθisinαiaicosθisinθicosθicosαi-cosθisinαiaisinθi0sinαicosαidi0001](7)
[Wθ=A1A2...An]? ? ? ? ? ? ? ? ? ? ? (8)
在矩陣[Ai]中,[ai]、[αi]、[θi]、[di]分別是關(guān)節(jié)偏移、關(guān)節(jié)扭轉(zhuǎn)、旋轉(zhuǎn)關(guān)節(jié)的關(guān)節(jié)變量、滑動(dòng)關(guān)節(jié)的關(guān)節(jié)變量,對(duì)于具體的機(jī)器人來(lái)說(shuō),[ai]、[αi]是固定不變的。
現(xiàn)只考慮關(guān)節(jié)變量是旋轉(zhuǎn)變量的情形,矩陣[Ai]對(duì)[θi]求偏導(dǎo),得:
[?Ai?θi=-sinθi-cosθicosαicosθisinαi-aisinθicosθi-sinθicosαisinθisinαiaicosθi00000000]
[=0-100100000000000Ai=RiAi]? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(9)
由式(9)可以推出末端操作器的位姿矩陣[Wθ]對(duì)[θi]的偏導(dǎo)數(shù):
[?Wθ?θi=?Nθ?θi?Oθ?θi?Aθ?θi?Pθ?θi0000=A1A2..RiAi.An] (10)
因而推出[fθ]對(duì)[θi]的偏導(dǎo)數(shù):
[?fθ?θi=2Pθ-P??Pθ?θi+2NθN?+OθO?+AθA?-1?Nθ?θiN?+?Oθ?θiO?+?Aθ?θiA?](11)
用[?fθ]表示[fθ]的梯度,由式(11)得:
[?fθ=?fθ?θ1?fθ?θ2...?fθ?θN]? ? ? ? ? ?(12)
在沿著負(fù)梯度方向進(jìn)行搜索時(shí),還應(yīng)考慮搜索步長(zhǎng)[λ]。若搜索步長(zhǎng)設(shè)置的過(guò)長(zhǎng),雖然搜索速度快,但算法易發(fā)散。若搜索步長(zhǎng)設(shè)置過(guò)短,雖然搜索速度慢,但算法收斂性能好。既然是局部搜索,考慮到粒子本身已經(jīng)接近最優(yōu)值,因而采取小步長(zhǎng)的方式進(jìn)行搜索是最佳的[8]。
若將關(guān)節(jié)變量[θ]采用二維向量的方式進(jìn)行表示,沿著負(fù)梯度方向上的搜索如圖2所示,圖中的同一曲線上的點(diǎn)具有相同的適應(yīng)度。每步搜索可寫(xiě)成式(13)的形式。
[θ=θ-λ?fθ]? ? ? ? ? ? ? ? ? ? ?(13)
設(shè)最大搜索步數(shù)為[MS],在一代中粒子[i]的適應(yīng)度最優(yōu),對(duì)粒子[i]做局部搜索。每一步搜索,倘若其適應(yīng)度優(yōu)于[pbesti]則將其值賦給[pbesti]。搜索完[MS]步后,將[pbesti]的值存入到[gbest]中。
3.2.2 逃逸策略
PSO算法迭代若干次后,所有的粒子都會(huì)趨于[gbest]。如果當(dāng)前[gbest]是一個(gè)局部極值,那么一旦所有粒子都收斂于這一點(diǎn)之后,這些粒子就很難跳出這個(gè)局極值點(diǎn)。為改善粒子生存密度,在PSO 算法的基礎(chǔ)上提出粒子逃逸策略,獲得更大的生存空間,從而提高算法的收斂速度和精度[9]。當(dāng)算法運(yùn)行過(guò)程中[gbest]連續(xù)[G]代無(wú)變化,需采用逃逸策略來(lái)產(chǎn)生新一代的粒子群。將原始一半種群保留,另一半采取式(14)的方式進(jìn)行逃逸[10]。
[θijt+1=lj+ruj-lj]? ? ? ? ? ? ? ? ? (14)
式中,[r]為[0,1]區(qū)間上的隨機(jī)數(shù),[θj∈lj,uj]。
3.3.3 改進(jìn)的PSO算法的流程圖
基于局部搜索和逃逸策略的PSO算法流程圖如圖3所示:
4 實(shí)驗(yàn)結(jié)果及分析
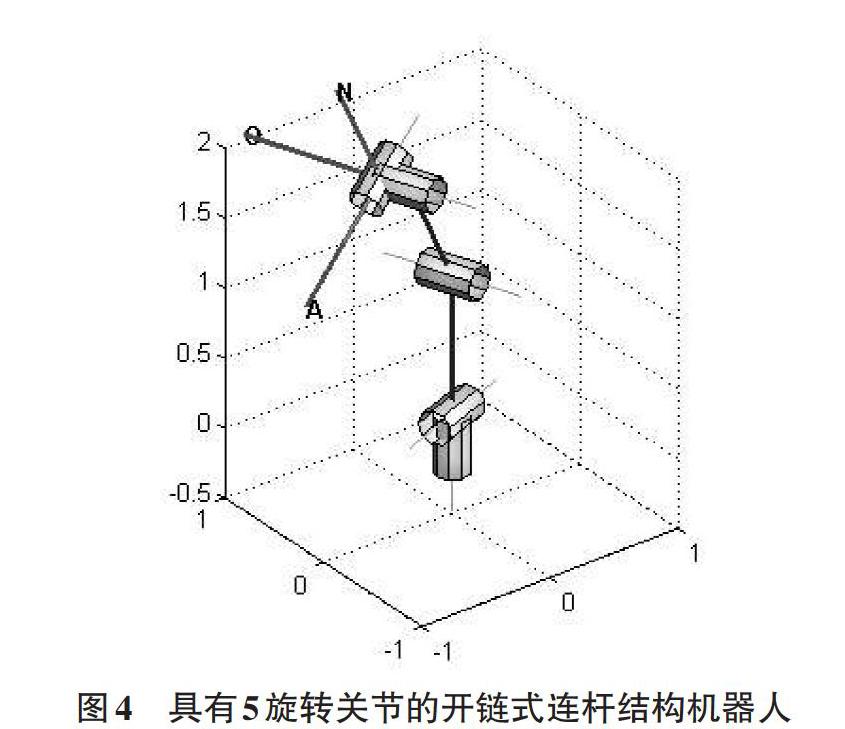
為驗(yàn)證基于PSO算法求解逆運(yùn)動(dòng)學(xué)問(wèn)題性能的好壞,以及改進(jìn)策略是否提升PSO算法的性能,選取如圖4所示的開(kāi)鏈?zhǔn)竭B桿結(jié)構(gòu)的機(jī)器人進(jìn)行測(cè)試,其位姿矩陣如式(15)所示的。
[W=-0.4698-0.3420-0.8138-0.5383-0.17100.9397-0.29620.01690.86600.0000-0.50002.06600001]? ? ? ? ? ?(15)
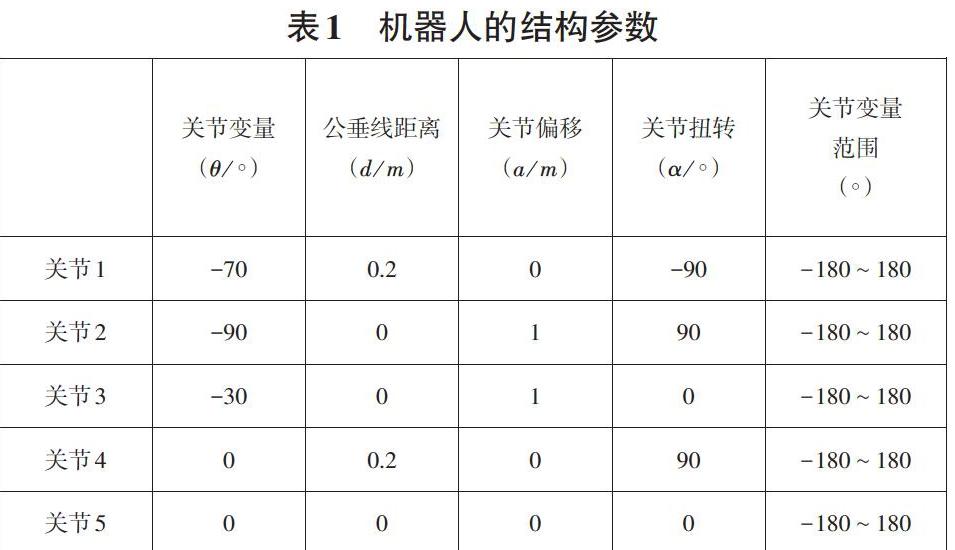
機(jī)器人的結(jié)構(gòu)參數(shù)如表1所示,表2給出了算法改進(jìn)前后的實(shí)驗(yàn)結(jié)果,圖5分別顯示目標(biāo)函數(shù)在算法改進(jìn)前后的收斂情況。
在兩種算法中,粒子群規(guī)模[M=40],維數(shù)[N=5],學(xué)習(xí)因子[c1=c2=1.5],最大迭代次數(shù)設(shè)為100,最小誤差設(shè)為0.02,[θi∈-180?180]([i=1,2,...,5])。原始算法中的慣性權(quán)重[w=0.7]。在改進(jìn)的算法中,慣性權(quán)重[w=0.9],搜索步長(zhǎng)[λ=0.2],最大搜索步數(shù)[MS=4],逃逸代數(shù)[G=5]。
表2的數(shù)據(jù)表明,PSO算法可以完成對(duì)逆運(yùn)動(dòng)學(xué)問(wèn)題的求解。在加入局部搜索環(huán)節(jié)和逃逸策略后,解的精度得到很大的提升,并且加快了收斂速度。圖5展示了兩種算法的整個(gè)收斂過(guò)程。很明顯,改進(jìn)算法的曲線優(yōu)于原始算法。
5 結(jié)論
本文利用PSO算法避開(kāi)直接求解逆運(yùn)動(dòng)學(xué)問(wèn)題,針對(duì)PSO算法中的不足提出改進(jìn)策略。結(jié)果表明,改進(jìn)后的PSO算法能夠加快收斂速度改善計(jì)算精度,保證機(jī)器人逆運(yùn)動(dòng)學(xué)問(wèn)題的實(shí)時(shí)性和準(zhǔn)確性。
參考文獻(xiàn):
[1] Manseur R, Doty KL. Structural Kinematics of 6-Revolute-axis Robot Manipulators[J]. Mechanism and Machine Theory, 1996, 31(5): 6472657.
[2] Eberhart R, Kennedy J. A new optimizer using particle swarm theory[C]. Proc Int Sym Micro Machine and Human Science: Nago2ya, Japan, Oct. 1995, 139- 43.
[3] 劉洪霞. 粒子群算法改進(jìn)及應(yīng)用[D]. 南寧: 廣西民族大學(xué), 2011:4-5.
[4] 郝武偉, 曾建潮. 基于聚類(lèi)分析的隨機(jī)微粒群算法[J].計(jì)算機(jī)工程與應(yīng)用, 2010, 46(8): 40-44.
[5] 龔純, 王正林. 精通MATLAB最優(yōu)化計(jì)算[M].北京:電子工業(yè)出版社, 2009.
[6] 陳寶林. 最優(yōu)化理論與算法[M].北京: 清華大學(xué)出版社, 2005.
[7] (美)Saeed B. Niku. 機(jī)器人學(xué)導(dǎo)論——分析、系統(tǒng)及應(yīng)用[D].北京: 電子工業(yè)出版社, 2004 .
[8] 任玉杰. 數(shù)值分析及其MATLAB實(shí)現(xiàn)[M]. 北京: 高等教育出版社, 2007.
[9] 謝錚桂, 鐘少丹, 韋玉科. 改進(jìn)的粒子群算法及收斂性分析[J].計(jì)算機(jī)工程與應(yīng)用,2011, 47(1): 46-49.
[10] 王志. 粒子群優(yōu)化算法及其改進(jìn)[D].重慶: 重慶大學(xué), 2011: 9-10.
【通聯(lián)編輯:唐一東】
