稻麥變量施肥機施肥狀態(tài)監(jiān)測方法
2019-11-07 02:38:24石紹軍王玉亮1權(quán)澤堃宋悅李玉風(fēng)宋子美王金星1
關(guān)鍵詞:信號
石紹軍,王玉亮1,,權(quán)澤堃,宋悅,李玉風(fēng),宋子美,王金星1,*
稻麥變量施肥機施肥狀態(tài)監(jiān)測方法
石紹軍2,王玉亮1,2,權(quán)澤堃2,宋悅2,李玉風(fēng)2,宋子美2,王金星1,2*
1. 山東農(nóng)業(yè)大學(xué) 山東省園藝機械與裝備重點實驗室, 山東 泰安 271018 2. 山東農(nóng)業(yè)大學(xué) 機械與電子工程學(xué)院, 山東 泰安 271018
針對稻麥變量施肥機施肥狀態(tài)監(jiān)測方法可靠性差等問題,研究設(shè)計一種稻麥變量施肥機施肥狀態(tài)監(jiān)測方法。該方法用RFP-602薄膜壓力傳感器來檢測排肥管中肥料顆粒的下落狀態(tài),對施肥系統(tǒng)的施肥狀態(tài)進(jìn)行監(jiān)測。首先通過仿真試驗對RFP-602薄膜壓力傳感器進(jìn)行可行性驗證;其次使用數(shù)字示波器來采集和儲存薄膜壓力傳感器產(chǎn)生的信號,以小波包變換對信號進(jìn)行能量分解得到特征向量;最后把特征向量導(dǎo)入BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行識別訓(xùn)練得到分類器,訓(xùn)練得到的分類器經(jīng)過效果檢驗后寫入單片機,單片機與排肥管上傳感器相連接就可以實現(xiàn)監(jiān)測方法的廣泛應(yīng)用。試驗結(jié)果表明:該方法監(jiān)測精度可達(dá)95.3%。實現(xiàn)對稻麥播種機施肥系統(tǒng)排肥管堵塞問題的狀態(tài)監(jiān)測。
稻麥; 施肥機; 狀態(tài)監(jiān)測
傳統(tǒng)施肥方式是在同一種植區(qū)域內(nèi)等量施加同一種肥料,會造成肥料利用率低和環(huán)境污染等問題[1]。變量施肥技術(shù)是根據(jù)地塊內(nèi)不同區(qū)域?qū)Ψ柿系男枨蠖淖兎柿鲜┓欧N類和數(shù)量的施肥方式,相比于傳統(tǒng)施肥方式,變量施肥可以提高肥料利用率、減少環(huán)境污染[2]。
肥料在導(dǎo)肥管中堵塞問題是變量施肥過程中的常見問題,導(dǎo)肥管堵塞會造成漏施現(xiàn)象,現(xiàn)在農(nóng)業(yè)生產(chǎn)中普遍采用人工監(jiān)測方法,人工監(jiān)視浪費勞力而且效果不佳。國內(nèi)外部分科研機構(gòu)正在研究堵塞監(jiān)測方法,東北農(nóng)業(yè)大學(xué)研制一種以紅外二極管為核心工作部件的施肥監(jiān)測儀[3],由于肥料的易潮、腐蝕和粘性等特性,以及田里工作環(huán)境易受泥土灰塵影響,實際監(jiān)測中紅外傳感器效果不佳;南京農(nóng)業(yè)大學(xué)設(shè)計一種基于光譜探測的小麥精準(zhǔn)追肥機,近地光譜探測技術(shù)通過測距和測速來實時調(diào)整施肥量,追肥控制精度達(dá)90%[4];華南農(nóng)業(yè)大學(xué)研制一種基于電容傳感器的監(jiān)測系統(tǒng)[5],該監(jiān)測系統(tǒng)結(jié)構(gòu)復(fù)雜、電容傳感器安裝不便,不適于廣泛應(yīng)用[6];北華大學(xué)設(shè)計一種以光電二極管為核心監(jiān)測模塊的監(jiān)測系統(tǒng)[7],華中農(nóng)業(yè)大學(xué)研究光電傳感器在監(jiān)測系統(tǒng)中的應(yīng)用[8],光電傳感器在實際工作中易受天氣和惡劣的工作環(huán)境影響,不能保證監(jiān)測精度。John Deere公司公開一種以流量傳感器為核心工作部件的監(jiān)測方法,流量傳感器工作之前需要校準(zhǔn)[9];Case公司研制一種播種機模糊智能監(jiān)測系統(tǒng),通過監(jiān)控軟件計算出控制率,控制速率通過CAN總線的數(shù)字輸出模塊輸出到模糊控制器,將模糊控制應(yīng)用于直流電機的無級調(diào)速,該監(jiān)測系統(tǒng)精度為91.4%[10]。
本文針對稻麥變量施肥機監(jiān)測方法存在的問題,研究一種以RFP-602薄膜壓力傳感器作為核心檢測模塊的監(jiān)測方法,對施肥系統(tǒng)漏施和堵塞現(xiàn)象進(jìn)行監(jiān)測,該方法具有結(jié)構(gòu)簡單、使用方便和準(zhǔn)確率高的優(yōu)點,可實現(xiàn)稻麥變量施肥機監(jiān)測方法的廣泛應(yīng)用。
1 硬件設(shè)計
1.1 試驗臺的構(gòu)建及工作原理
排肥試驗臺架主要由儲肥箱、臺架、外槽輪排肥器、排肥管、薄膜壓力傳感器、肥料收集器、導(dǎo)軌、電機底座、步進(jìn)電機構(gòu)成,整體結(jié)構(gòu)如圖1所示。

圖1 排肥試驗臺架
1儲肥箱 2臺架 3外槽輪排肥器 4排肥管 5薄膜壓力傳感器 6肥料收集器 7導(dǎo)軌8電機底座 9步進(jìn)電機

圖2 導(dǎo)肥管末端
試驗時,通過控制步進(jìn)電機啟動帶動外槽輪排肥器轉(zhuǎn)動,進(jìn)而模擬播種機在田間的施肥過程。當(dāng)步進(jìn)電機啟動時,試驗臺架模擬正常流通的施肥過程;當(dāng)步進(jìn)電機停止時,試驗臺架模擬肥料用盡的施肥過程;當(dāng)人為堵塞排肥管時,試驗臺架模擬排肥管堵塞的施肥過程。通過模擬三種施肥狀態(tài)并調(diào)節(jié)步進(jìn)電機轉(zhuǎn)速和外槽輪排肥器開度,獲取多組試驗數(shù)據(jù)。
傳感器安裝在排肥管末端斜面上,傳感器面積小,不會影響排肥效果。人為對導(dǎo)肥管進(jìn)行干預(yù),使導(dǎo)肥管末端堵塞,通過這種方式模擬播種機施肥過程中導(dǎo)肥管堵塞狀況。導(dǎo)肥管末端結(jié)構(gòu)及薄膜壓力傳感器安裝位置如圖2所示。
1.2 薄膜壓力傳感器概況
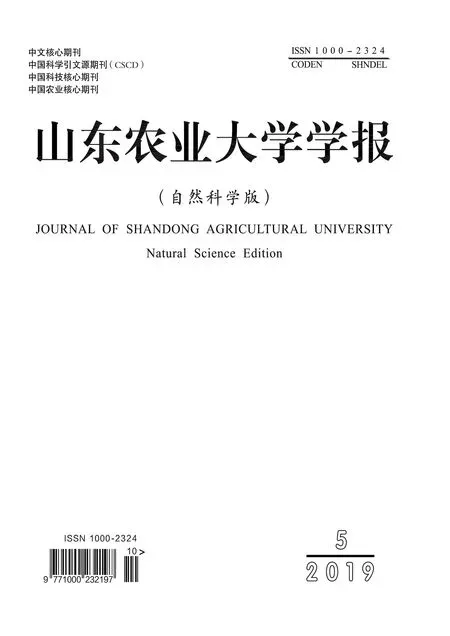
本方法所用RFP-602薄膜壓力傳感器實物如圖3所示,RFP-602薄膜壓力傳感器是一種應(yīng)變材料為半導(dǎo)體的電阻應(yīng)變式傳感器,具有靈敏度高和壓阻特性穩(wěn)定的特點,本方法的檢測對象是強度較弱的壓力信號,所以采用RFP-602薄膜壓力傳感器作為檢測設(shè)備。RFP-602薄膜壓力傳感器將肥料顆粒撞擊產(chǎn)生的壓力信號轉(zhuǎn)化為電阻信號,電阻信號再經(jīng)過一系列處理后轉(zhuǎn)化為電壓信號輸出到單片機[11,12]。RFP-602薄膜壓力傳感器部分參數(shù)如表1所示。
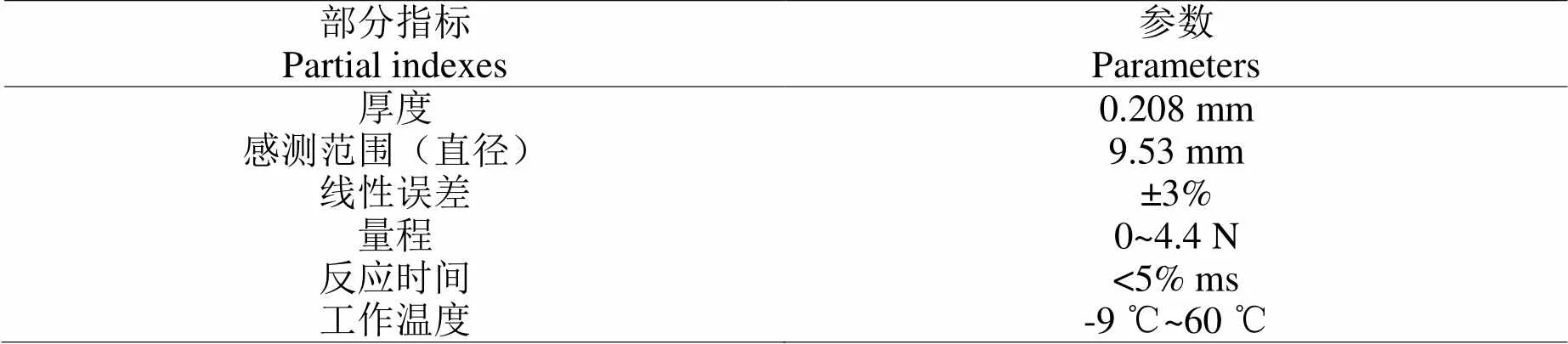
表1 傳感器部分指標(biāo)參數(shù)
2 驗證薄膜壓力傳感器可行性
為測試薄膜壓力傳感器監(jiān)測施肥系統(tǒng)施肥狀態(tài)的可行性,利用如圖1所示試驗臺架,通過啟動步進(jìn)電機使試驗臺架模擬正常流通的施肥狀態(tài);通過停止步進(jìn)電機使試驗臺架模擬肥料用盡的施肥狀態(tài);通過人為堵塞排肥管使試驗臺架模擬排肥管堵塞的施肥狀態(tài)。
RFP-602薄膜壓力傳感器安裝位置如圖2所示,傳感器具體的安裝位置是排肥管末端斜面,傳感器所占空間小,不會影響排肥管施肥狀態(tài)。因為傳感器所占空間小且肥料下落速度較快,所以壓力傳感器并不能檢測到每一個肥料顆粒產(chǎn)生的壓力信號。通過把外槽輪排肥器和排肥管的三維模型導(dǎo)入EDEM進(jìn)行仿真試驗,設(shè)置肥料在排肥管中的下落速度為200粒/s,試驗結(jié)果表明一定會有肥料顆粒撞擊到壓力傳感器。仿真試驗圖像如圖4所示,圖中三種顆粒顏色表示顆粒速度大小,紅色顆粒速度最快,綠色顆粒速度次之,藍(lán)色顆粒速度最慢[13]。

圖3 薄膜壓力傳感器

圖4 排肥仿真
肥料顆粒撞擊薄膜壓力傳感器產(chǎn)生的信號用數(shù)字示波器進(jìn)行采集和保存,采集、保存到的數(shù)據(jù)和波形圖可以使用硬盤取出進(jìn)行處理分析。數(shù)字示波器主要參數(shù)如表2所示。

表2 示波器主要參數(shù)
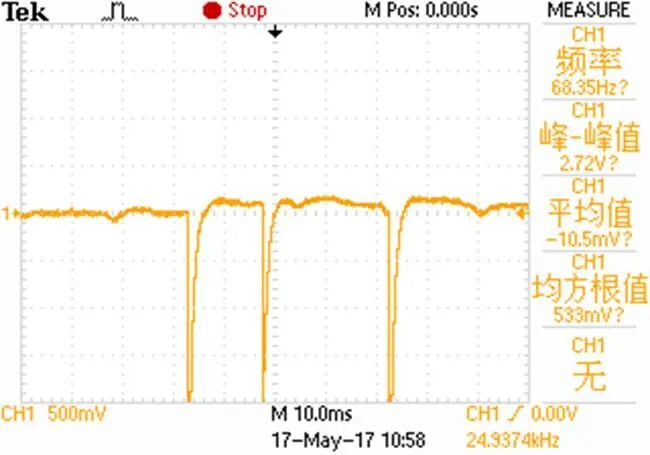
圖5 正常流通時的波形圖
圖6 產(chǎn)生堵塞時的波形圖

圖7 肥料用盡時的波形圖
在正常流通、肥料用盡和排肥管堵塞三種施肥狀態(tài)下各采集300組數(shù)據(jù),用來分析不同施肥狀態(tài)下波形圖的差異。利用薄膜壓力傳感器獲得三種施肥狀態(tài)的波形圖如下圖所示,三種施肥狀態(tài)下的波形圖具有明顯差異。圖5為正常流通狀態(tài)下的波形圖,波形圖像間歇出現(xiàn)向下的峰值,且峰值較大,產(chǎn)生這種波形圖的原因是正常流通狀態(tài)下肥料顆粒撞擊壓力傳感器所產(chǎn)生的壓力信號;如圖6為排肥管堵塞狀態(tài)下的波形圖,波形圖像有向上和向下的峰值,產(chǎn)生這種波形圖的原因是排肥管堵塞狀態(tài)下肥料顆粒持續(xù)撞擊傳感器所產(chǎn)生的壓力信號;肥料用盡狀態(tài)下的波形圖,波形圖像沒有峰值(圖7)。三種施肥狀態(tài)下波形圖差異明顯,證明利用薄膜壓力傳感器監(jiān)測施肥狀態(tài)可行。
3 數(shù)據(jù)采集與信號分析
3.1 數(shù)據(jù)采集
利用如上圖1所示的試驗臺架。當(dāng)步進(jìn)電機啟動時,試驗臺架模擬正常流通的施肥過程;當(dāng)步進(jìn)電機停止時,試驗臺架模擬肥料用盡的施肥過程;當(dāng)人為堵塞排肥管時,試驗臺架模擬排肥管堵塞的施肥過程。
當(dāng)控制步進(jìn)電機啟動時,在試驗臺架的肥料箱中加入肥料,模擬正常流通的施肥過程,安裝在導(dǎo)肥管末端的薄膜壓力傳感器與圖8所示的信號轉(zhuǎn)換模塊相連接,信號轉(zhuǎn)換模塊再與數(shù)字示波器相連接。試驗開始后,電壓信號經(jīng)數(shù)字示波器的作用生成波形。通過控制外槽輪排肥器的開度和步進(jìn)電機的轉(zhuǎn)速不同進(jìn)行多組試驗,可以通過數(shù)字示波器得到多組波形圖,把得到的多組波形圖存儲在硬盤中用來進(jìn)行后續(xù)的試驗分析。
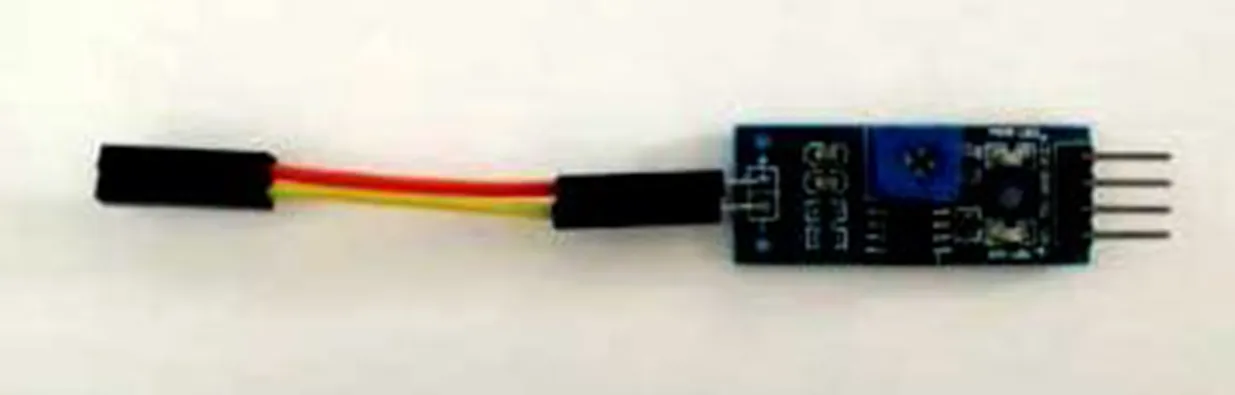
圖 8 信號轉(zhuǎn)換模塊
試驗臺模擬肥料正常流通時,數(shù)字示波器顯示的波形信號間歇出現(xiàn)向下的尖峰值,即為肥料顆粒掉落、擊打在傳感器應(yīng)變片表面時產(chǎn)生的壓力在數(shù)字示波器顯示出來的波形圖,如圖9所示。

圖9 模擬正常流通時的波形圖
當(dāng)控制步進(jìn)電機啟動時,在試驗臺架的肥料箱中不加入肥料,模擬肥料用盡的施肥過程,安裝在導(dǎo)肥管末端的薄膜壓力傳感器與圖8所示的信號轉(zhuǎn)換模塊相連接,信號轉(zhuǎn)換模塊再與數(shù)字示波器相連接。試驗開始后,電壓信號經(jīng)數(shù)字示波器的作用生成波形。通過控制外槽輪排肥器的開度和步進(jìn)電機的轉(zhuǎn)速不同進(jìn)行多組試驗,可以通過數(shù)字示波器得到多組波形圖,把得到的多組波形圖加以存儲用來進(jìn)行后續(xù)的試驗分析。
試驗臺模擬肥料用盡時,如圖10所示數(shù)字示波器顯示的波形信號大致是一條直線,無波峰和波谷,即為肥料顆粒掉落、擊打在傳感器應(yīng)變片表面時產(chǎn)生的壓力在數(shù)字示波器顯示出來的波形圖。

圖10 模擬肥料用盡時的波形圖

圖11 模擬肥料堵塞時的波形圖
當(dāng)控制步進(jìn)電機啟動時,在試驗臺架的肥料箱中加入肥料,把如圖2所示的導(dǎo)肥管末端封住,模擬肥料堵塞的施肥過程,安裝在導(dǎo)肥管末端的薄膜壓力傳感器與圖8所示的信號轉(zhuǎn)換模塊相連接,信號轉(zhuǎn)換模塊再與數(shù)字示波器相連接。試驗開始后,電壓信號經(jīng)數(shù)字示波器的作用生成波形。通過控制外槽輪排肥器的開度和步進(jìn)電機的轉(zhuǎn)速不同進(jìn)行多組試驗,可以通過數(shù)字示波器得到多組波形圖,把得到的多組波形圖加以存儲用來進(jìn)行后續(xù)的試驗分析。
試驗臺模擬肥料堵塞時,如圖11所示數(shù)字示波器顯示的波形圖像有向上和向下的峰值,產(chǎn)生這種波形圖的原因是排肥管堵塞狀態(tài)下肥料顆粒持續(xù)撞擊傳感器所產(chǎn)生的壓力信號,即為肥料顆粒掉落、擊打在傳感器應(yīng)變片表面時產(chǎn)生的壓力在數(shù)字示波器顯示出來的波形圖。
3.2 基于小波包變換的信號分析
小波分析是在Fourier(傅里葉)分析的基礎(chǔ)上發(fā)展起來的。因為小波分析具有良好的時頻局部化分析能力,所以小波分析被廣泛應(yīng)用于信號處理等諸多領(lǐng)域。由于db3的時域有限,支持增強,實時性好[14]。
db小波不依賴于傅里葉變換,具有時頻局部特征良好和多分辨率分析的優(yōu)點,運算不占額外的存儲空間,適合于硬件系統(tǒng)的實現(xiàn)[15]。所以本方法采用“db3”小波基分別對三種施肥狀態(tài)下的信號進(jìn)行小波包分解,小波尺度函數(shù)和小波函數(shù)如圖12所示。

圖12 小波尺度函數(shù)和小波函數(shù)
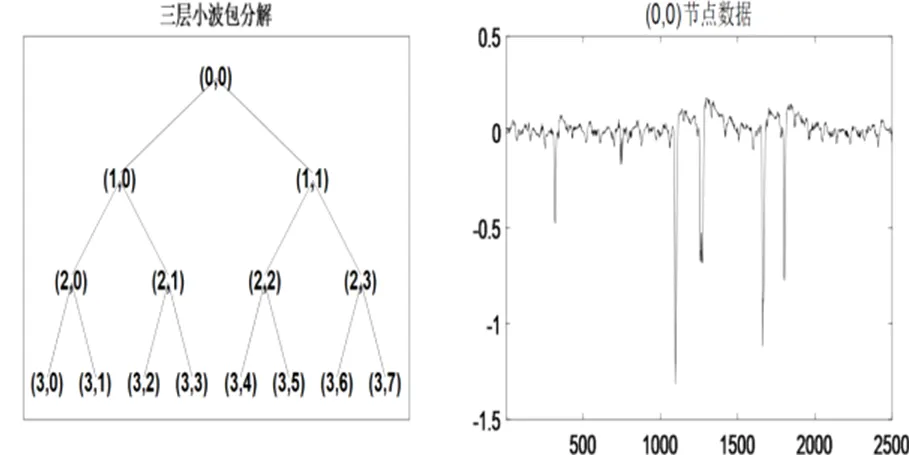
圖13 小波樹
利用“db3”小波基對三種施肥狀態(tài)下的信號進(jìn)行小波包分解得到不同施肥狀態(tài)下的小波樹,小波樹如圖13所示。小波樹中(0,0)節(jié)點代表原始信號,(a,b)節(jié)點的含義為第a層小波包分解之后第b個節(jié)點的系數(shù)。
3.3 小波包特征提取
3.3.1 小波包特征提取實例每個訓(xùn)練數(shù)據(jù)中的樣本數(shù)為212,下面說明構(gòu)成特征矢量的每個技巧[16]。對第5級分辨率進(jìn)行小波包多分辨率分析得到32個子頻帶,每個子頻帶包含128個小波包系數(shù);
根據(jù)第5級分辨率的每一個子頻帶,計算小波包系數(shù)所包含的平均能量使得:

3.3.2 小波包特征提取應(yīng)用三層小波包分解后產(chǎn)生8個子頻帶,如圖14所示為子頻帶的能量分布。歸一化處理8個子頻帶能量,得到的8維特征向量作為施肥狀態(tài)識別的特征向量[17]。
特征矢量的標(biāo)準(zhǔn)化和調(diào)整在訓(xùn)練神經(jīng)網(wǎng)絡(luò)的收斂性中起著關(guān)鍵作用[18]。如果不進(jìn)行標(biāo)準(zhǔn)化,網(wǎng)絡(luò)將不能收斂于期望的網(wǎng)絡(luò)錯誤,網(wǎng)絡(luò)的收斂性會導(dǎo)致偏離而且給真實檢驗數(shù)據(jù)進(jìn)行加權(quán)是必要的。

圖14 三種施肥狀態(tài)下能量分布
3.4 BP神經(jīng)網(wǎng)絡(luò)模型識別訓(xùn)練
利用BP神經(jīng)網(wǎng)絡(luò)模型對三種施肥狀態(tài)進(jìn)行識別訓(xùn)練[19]。選用的神經(jīng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)具有一個隱含層,神經(jīng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)輸入層有8個神經(jīng)元,8個神經(jīng)元分別對應(yīng)特征向量的8個分量;神經(jīng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)輸出層有“0”和“1”兩個神經(jīng)元,通過兩個神經(jīng)元的組合可以表示三種施肥狀態(tài)類型[20]。通過把訓(xùn)練目標(biāo)精度調(diào)至0.02,從三種施肥狀態(tài)的特征向量中各選取150組作為樣本進(jìn)行訓(xùn)練,當(dāng)樣本訓(xùn)練進(jìn)行到第317次時,訓(xùn)練迭代停止,收斂到穩(wěn)定值得到分類器。
3.5 分類器效果檢驗
利用SPSS軟件對得到的分類器進(jìn)行效果檢驗[21],分別從正常流通、排肥管堵塞和肥料用盡三種狀態(tài)下各取100組作為檢測樣本,用檢測樣本測試該方法的識別效果(表3)。在表3中:正常流通施肥狀態(tài)下的識別正確率為92%,被誤判為排肥管堵塞狀態(tài)的概率為8%,正常流通狀態(tài)在三種施肥狀態(tài)中識別正確率最低;排肥管堵塞施肥狀態(tài)下的識別正確率為94%,被誤判成正常流通施肥狀態(tài)的概率為6%;肥料用盡施肥狀態(tài)下的識別正確率為100%,在三種施肥狀態(tài)中識別正確率最高。樣本測試得到的總體識別正確率達(dá)95.3%,表明該方法滿足施肥系統(tǒng)施肥狀態(tài)的監(jiān)測要求。

表3 識別結(jié)果統(tǒng)計
4 結(jié)論
(1)研究一種稻麥變量施肥機施肥狀態(tài)監(jiān)測方法。該方法用RFP-602薄膜壓力傳感器來檢測排肥管中肥料顆粒的下落狀態(tài),對施肥系統(tǒng)的施肥狀態(tài)進(jìn)行監(jiān)測。
(2)通過仿真試驗對RFP-602薄膜壓力傳感器進(jìn)行可行性驗證;其次使用數(shù)字示波器來采集和儲存薄膜壓力傳感器產(chǎn)生的信號,以小波包變換對信號進(jìn)行能量分解得到特征向量;最后把特征向量導(dǎo)入BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行識別訓(xùn)練得到分類器,訓(xùn)練得到的分類器經(jīng)過效果檢驗后寫入單片機,單片機與導(dǎo)肥管上傳感器相連接就可以實現(xiàn)監(jiān)測方法的廣泛應(yīng)用。
(3)通過搭建試驗臺架模擬田間實際施肥過程。試驗結(jié)果表明:該方法的監(jiān)測精度可達(dá)95.3%。實現(xiàn)對稻麥播種機施肥系統(tǒng)導(dǎo)肥管堵塞問題的狀態(tài)監(jiān)測。
[1] 陳金,趙斌,衣淑娟,等.我國變量施肥技術(shù)研究現(xiàn)狀與發(fā)展對策[J].農(nóng)機化研究,2017,39(10):1-6
[2] 劉成良,苑進(jìn),劉建政,等.基于ARM和DSP的雙變量施肥控制系統(tǒng)設(shè)計與試驗[J].農(nóng)業(yè)機械學(xué)報,2010,41(S1):233-238
[3] 果莉,遲天陽,歐陽斌林,等.氣吸式播種機的施肥監(jiān)測儀:中國,CN2650121Y[P].2004-10-20
[4] 陳滿,施印炎,汪小旵,等.基于光譜探測的小麥精準(zhǔn)追肥機設(shè)計與試驗[J].農(nóng)業(yè)機械學(xué)報,2015,46(5):26-32
[5] 羅錫文,資雙飛,苗峻齊,等.一種施肥機監(jiān)控系統(tǒng):中國,CN102349388A[P].2012-02-15
[6] 張書慧,齊江濤,廖宗建,等.基于CPLD的變量施肥控制系統(tǒng)開發(fā)與應(yīng)用[J].農(nóng)業(yè)工程學(xué)報,2010,26(8):200-204
[7] 陳廣大,馬占輝,馬超,等.基于ARM的玉米免耕播種施肥機監(jiān)控系統(tǒng)設(shè)計[J].中國農(nóng)機化學(xué)報,2016,37(5):209-212
[8] 王賢鋒.光電傳感器在農(nóng)業(yè)機械中的應(yīng)用[J].農(nóng)業(yè)技術(shù)與裝備,2007(8):14,16
[9] Landphair DK. Method of calibrating the meter of a product distribution apparatus and monitoring method: Canada, CA20112747523[P].2011-07-29
[10] Ruicheng D, Bingcai G, Ningning L,. A Design and experiment on intelligent fuzzy monitoring system for corn planters[J]. International Journal of Agricultural & Biological Engineering, 2013,6(3):11-18
[11] 魏新華,張進(jìn)敏,但志敏,等.沖量式谷物流量傳感器測產(chǎn)信號處理方法[J].農(nóng)業(yè)工程學(xué)報,2014,30(15):222-228
[12] 焦敬品,于兆卿,劉文華,等.基于小波變換的薄層厚度電磁超聲測量方法[J].儀器儀表學(xué)報,2013,34(3):588-595
[13] 施印炎,陳滿,汪小旵,等.稻麥精準(zhǔn)變量施肥機排肥性能分析與試驗[J].農(nóng)業(yè)機械學(xué)報,2017,48(7):97-103
[14] 張敬明,萬俊,梁瑞濤,等.基于提升算法的3階Daubechies離散小波變換的FPGA實現(xiàn)[J].兵工自動化,2012,31(8):78-81
[15] 周彬倩,陸繼明,毛承雄,等.小波檢測雙電源自動轉(zhuǎn)換開關(guān)電壓凹陷策略[J].電力系統(tǒng)及其自動化學(xué)報,2015,27(3):5-10,41
[16] 許天周,黃春光.小波分析理論、算法及其應(yīng)用[M].北京:國防工業(yè)出版社,2007:178-179
[17] 李明愛,張夢,孫炎珺.基于小波包和深度信念網(wǎng)絡(luò)的腦電特征提取方法[J].電子測量與儀器學(xué)報,2018,32(1):111-118
[18] 劉崇,祝錫永.基于BP神經(jīng)網(wǎng)絡(luò)的醫(yī)保欺詐識別[J].計算機系統(tǒng)應(yīng)用,2018,27(6):34-39
[19] 李錦明,曲毅,裴禹豪,等.預(yù)訓(xùn)練卷積神經(jīng)網(wǎng)絡(luò)模型微調(diào)的行人重識別[J].計算機工程與應(yīng)用,2018,54(20):219-222,229
[20] 孫波,黃建波,陸潔,等.基于小波SOM神經(jīng)網(wǎng)絡(luò)和多Agent系統(tǒng)的微電網(wǎng)故障診斷方法[J].艦船電子工程,2018,38(8):151-155,186
[21] 高艷紅,劉偉,程國棟,等.黑河流域土壤質(zhì)地分類數(shù)據(jù)建立及其模擬效果檢驗[J].高原氣象,2007,26(5):967-974
Fertilization Status Monitoring Method of Rice and Wheat Variable Fertilizer Applying Machine
SHI Shao-jun2, WANG Yu-liang1,2, QUAN Ze-kun2, SONG Yue2, LI Yu-feng2, SONG Zi-mei2, WANG Jin-xing1,2*
1.271018,2.271018,
In order to solve the problem of poor reliability of fertilizer condition monitoring method of rice and wheat variable fertilizer machine, we designed a new method. This method used rfp-602 thin film pressure sensor to detect the falling state of fertilizer particles in the fertilizer discharge pipe and monitored the fertilization state of the fertilization system. Firstly, the feasibility of rfp-602 thin film pressure sensor was verified by simulation test. Secondly, digital oscilloscope is used to collect and store the signal generated by the thin film pressure sensor. Finally, the feature vector is imported into the BP neural network model for recognition training to obtain the classifier, which is then written into the single-chip microcomputer after effect testing. The test results show that the monitoring accuracy can reach 95.3%m this method can be used to monitor the status of clogging of discharge pipe of rice and wheat seeder fertilization system.
Rice and wheat; fertilizer applicator; condition monitoring
S224.21
A
1000-2324(2019)05-0778-06
10.3969/j.issn.1000-2324.2019.05.009
2018-12-19
2019-01-26
山東省農(nóng)機裝備研發(fā)創(chuàng)新計劃項目(2016YF007);山東現(xiàn)代農(nóng)業(yè)產(chǎn)業(yè)技術(shù)體系水稻創(chuàng)新團隊資助項目和“雙一流”獎補資金項目(SYL2017XTTD14)
石紹軍(1996-),男,碩士研究生,專業(yè)方向:智能農(nóng)機裝備. E-mail:17863801101@163.com
Author for correspondence. E-mail:jinxingw@163.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06