基于MRAS-RLS算法永磁同步電機參數辨識
2019-11-08 09:18:04劉世交白國振胡冬馮春花李帥
石油化工自動化 2019年5期
關鍵詞:模型
劉世交,白國振,胡冬,馮春花,李帥
(上海理工大學,上海 200082)
近年來,永磁同步電機(PMSM)在軍事和民用場合應用的范圍越來越廣,性能要求也越來越高。在很多精確控制和快速定位的場合,伺服系統要求更高的跟蹤精度和更好的穩定性。先進的控制策略要求電機參數準確,所以實時地掌握精確的電機參數對設計和分析控制系統穩定性都非常重要。
目前,國內外常用的電機參數辨識方法有: 遞推最小二乘法(RLS)、模型參考自適應法(MRAS)、擴展卡爾曼濾波算法和人工智能算法等。RLS可以很好地解決數量和精度的矛盾,但是在辨識的過程中對舊的數據有依賴性,易產生數據飽和現象[1],所以算法跟隨性差。也有學者通過限定記憶和加入遺忘因子的方法用于消除舊數據的影響,提高辨識算法的跟隨性[2],但是辨識精度和跟隨性難以同時達到較好結果。MRAS的關鍵在于設計的自適應規則是否合理,建立準確的可變模型可以確保快速收斂到準確的估計值。擴展卡爾曼濾波算法適用于對實時性要求較高的參數辨識,但辨識過程中需要進行矩陣運算,高階運算計算量很大,對硬件的要求很高,而噪聲估計的合理性、真實的工況模型誤差以及計算機有限字長都會導致誤差方陣失去正定性,導致算法不能收斂到最優值[3-4]。一些智能算法,如神經網絡、遺傳算法、蟻群算法等逐漸被應用到參數辨識中,這些智能算法在結構合理、參數選取正確的情況下,可以獲得較好的辨識結果,但是由于算法的復雜性、結構的合理性以及參數選取的正確性都對參數辨識產生很大影響,而且算法運算量很大,對硬件要求很高,常用的控制器往往達不到理想的效果[5-6]。
因此,本文提出了一種改進的遞推最小二乘法(MRAS-RLS),用于解決PMSM的參數辨識問題。該算法結合MRAS算法和RLS算法的優點,參數辨識的精度和速度都得到很大的提高,對時變參數的辨識跟隨性也很好。通過仿真分析,證明了MRAS-RLS算法比改進前的RLS算法的辨識效果有很大的改進。
1 永磁同步電機數學模型的建立
PMSM定轉子之間的位置是變化的,所以電磁關系比較復雜。為了方便建立PMSM模型,使模型合理簡化,先做如下假設[7]: 不考慮電機的鐵芯飽和情況;不考慮電機中的渦流以及磁滯損耗的情況;不考慮磁場中的空間諧波,三相的繞組對稱并且砸數、電阻和軸線位移的角度相同。經過坐標變換,PMSM在旋轉坐標系d-q下的數學模型:
1)電壓方程如式(1)所示:
(1)
式中:ud,uq——定子電壓在d軸和q軸上的分量;id,iq——分別為定子電流在d軸和q軸上的分量;R——定子的電阻;ψd,ψq——定子磁鏈在d軸和q軸的分量;we——轉子的角速度;Ld,Lq——d軸和q軸的電感分量。
2)定子磁鏈方程如式(2)所示:
(2)
將式(2)代入式(1)中,得到定子電壓方程為
(3)
式中:ψf——永磁體磁鏈,Wb。
3)三相PMSM的數學模型已實現完全解耦,由此得出電磁轉矩方程如式(4)所示:
(4)
式中:pn——電機的極對數。
2 MRAS-RLS算法參數辨識算法
2.1 模型參考自適應算法辨識原理
MRAS算法辨識步驟: 先根據工作需求選取參考模型,再選取含有需要辨識參數的可調模型,將兩者模型的輸出誤差值進行比較,按照建立的自適應規則調整模型中的參數值,當參數收斂到某數值時,即為所需要的辨識參數。MRAS算法結構如圖1所示。
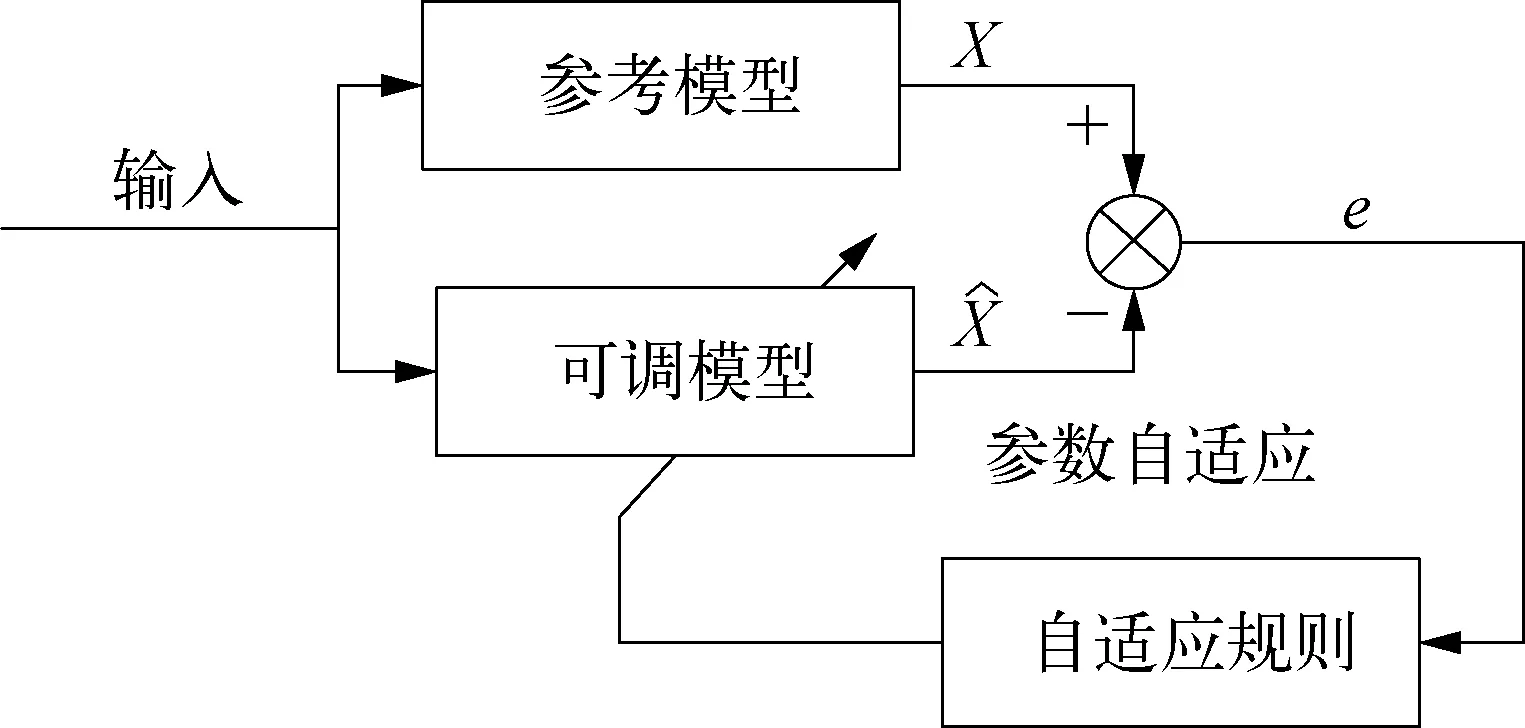
圖1 MRAS算法結構示意
MRAS設計的關鍵在于自適應律的設計是否合理,本文使用Popov超穩定性理論來確定在線辨識電機參數的自適應律。Popov超穩定性理論是根據時變系統特性提出的,由1個非線性部分組成的反饋通道,前向通道由線性定常部分組成。標準非線性反饋系統結構如圖2所示。

圖2 標準非線性反饋系統示意
當系統輸入為0時,u=-w,前向通道可表示為
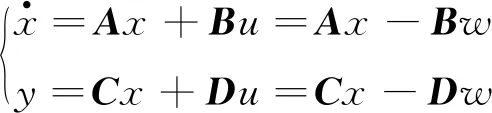
(5)
式中:A,B,C,D——狀態空間矩陣,且A和B能控,A和C能觀。根據Popov超穩定性理論,該系統想要保持穩定狀態,必須滿足式(6)[8]:
(6)
保持系統穩定的前提條件是G(s)=D+C(SI-A)-1B為嚴格正實矩陣。Popov超穩定性理論設計的前提,是連續反饋系統在運行中需十分穩定,使得構造的可調模型無限接近參考模型,輸出誤差趨近于0[9],進而得出需要辨識出的參數。
2.2 遞推最小二乘法辨識原理

Ym=XmΘ
(7)
(8)
進行第m+1次測量,系統方程為
y(m+1)=θ1x1(m+1)+
θ2x2(m+1)+…+θnxn(m+1)
(9)
寫成矩陣形式為
Ym+1=Xm+1Θ
(10)
(11)
通過1個矩陣運算恒等式對式(11)進行變換,首先建立該恒等式,如果A,A+BC,E+CA-1B,A+BC均為非奇異方陣,其中E為單位矩陣,則式(12)所示的矩陣恒等式成立:
(A+BC)-1=A-1-A-1B(E+CA-1B)-1CA-1
(12)

P(m+1)=
[P(m)-1+X(m+1)XT(m+1)]-1=
P(m)-P(m)X(m+1)[E+
XT(m+1)P(m)X(m+1)]-1
XT(m+1)P(m)
(13)
將式(8)和P(m)的定義公式相結合,如式(14)所示:

P(m)X(m+1)[E+XT(m+1)
(14)
(15)
2.3 MRAS-RLS算法辨識原理
通過上述分析可知,RLS算法的辨識速度很快,但辨識的誤差比較高;而MRAS算法辨識精度很高,但在辨識前期的辨識速度和穩定性卻不高。MRAS-RLS算法將MRAS算法引入RLS算法中,利用MRAS參數辨識的優勢改進RLS算法的不足,MRAS-RLS算法參數辨識算法結構如圖3所示。
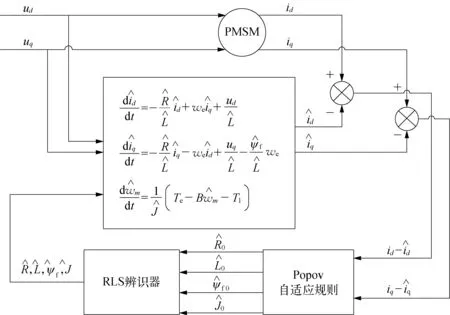
圖3 MRAS-RLS算法參數辨識結構示意
由圖3可知,MRAS算法不僅為RLS模塊提供較準確的初值,還將用于辨識PMSM的定子電阻、定子電感、轉子磁鏈、轉動慣量。具體的辨識過程如下:
1)使用MRAS算法辨識定子電感、定子電阻、轉子磁鏈、轉動慣量4個參數。

3 仿真結果分析
3.1 MRAS-RLS算法仿真模型建立
在Matlab/Simulink模塊上,建立矢量控制和脈寬調制的PMSM控制方法,用以PMSM的參數辨識。根據MRAS-RLS算法原理,整合了RLS算法模塊和MRAS算法模塊的優點,搭建了MRAS-RLS算法辨識模型。
3.2 定常參數辨識仿真結果分析
本文采用大郡公司TS004 PMSM建立仿真模塊,電機的基本參數見表1所列。
電機參數按照表1設定,轉速設定為900 r/min,基于MRAS-RLS和RLS算法的PMSM參數辨識結果見表2所列。
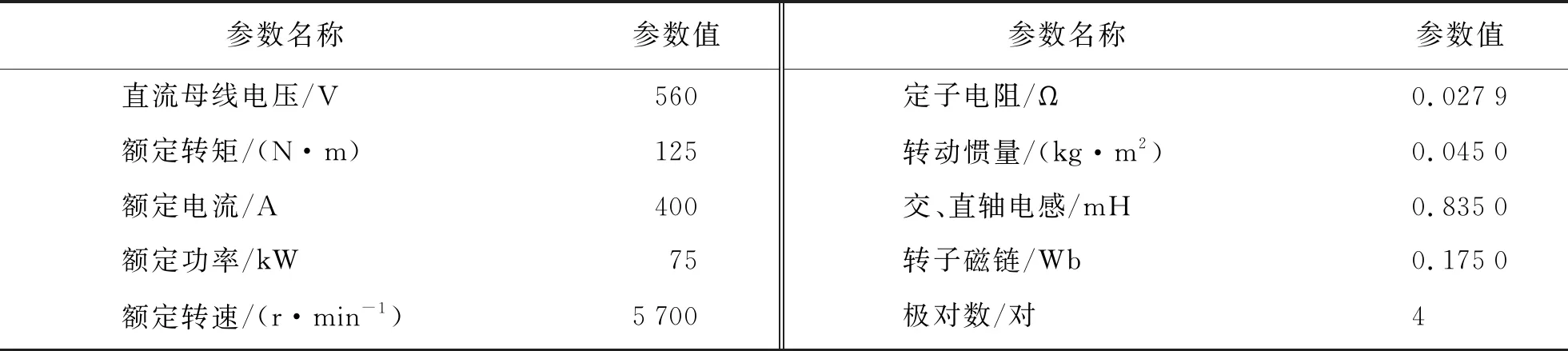
表1 TS004 PMSM參數

表2 MRAS-RLS算法和RLS算法參數辨識結果對比
根據MRAS-RLS算法和RLS算法辨識結果分析可知,MRAS-RLS算法對定子電感、轉子磁鏈、轉動慣量的辨識精度得到了明顯的提高,辨識時間也明顯縮短,動態過程得到了很大的改善。
3.3 時變參數辨識仿真結果分析
電機運行過程中受到外界各種條件的影響,電機參數經常發生變化,辨識算法需要比較好的跟隨性才能更好地對時變參數進行辨識,所以對時變參數的辨識也是MRAS-RLS算法研究的一部分。對PMSM模型的庫文件進行解鎖、修改和更新,使其具有在線動態修改參數的功能。先設定電機參數為正弦函數并進行微小變化,圖4~圖7是對時變參數的辨識效果。
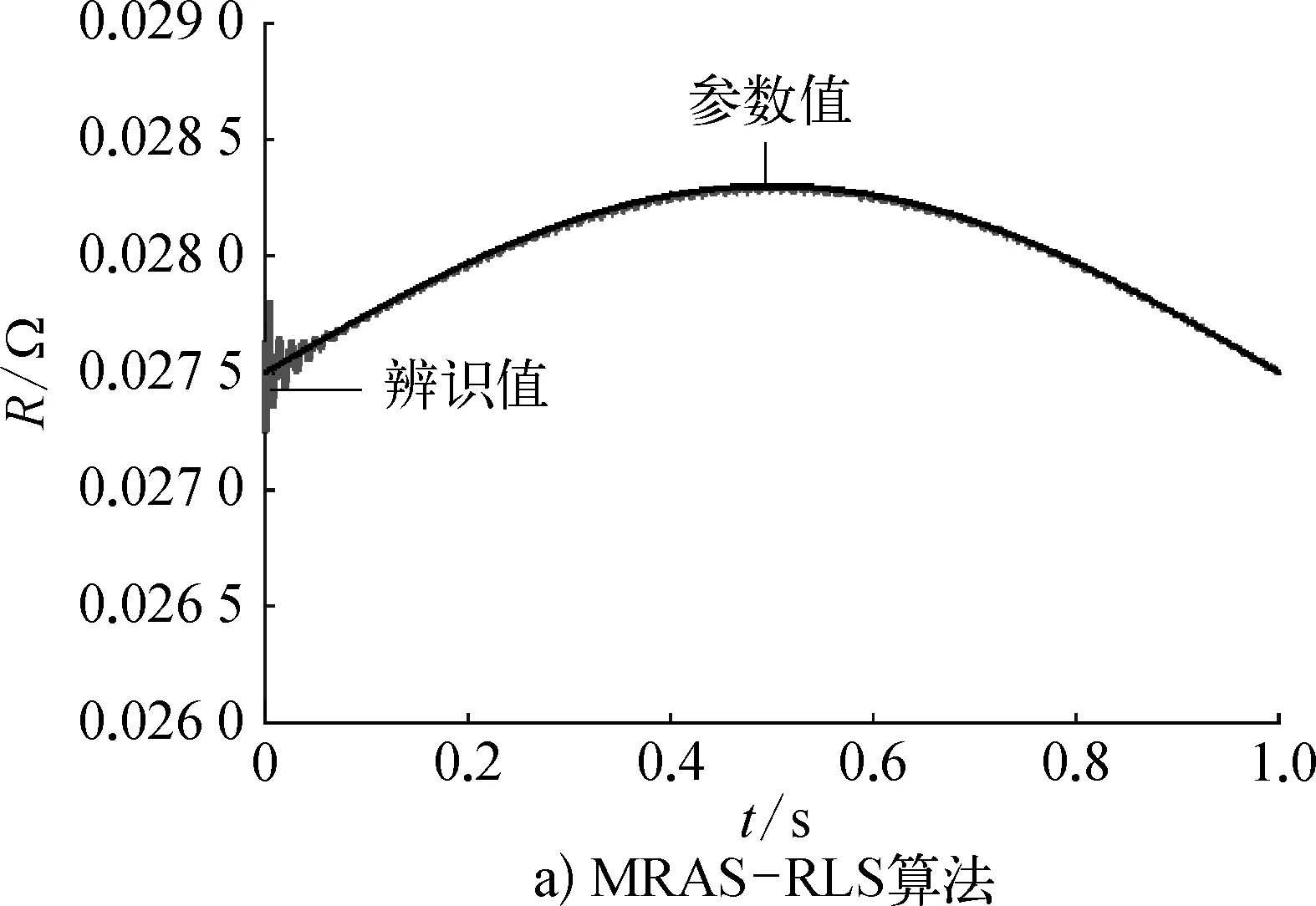
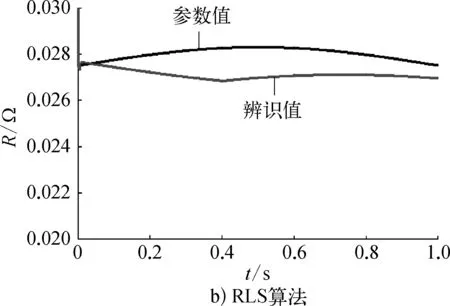
圖4 定子電阻辨識結果
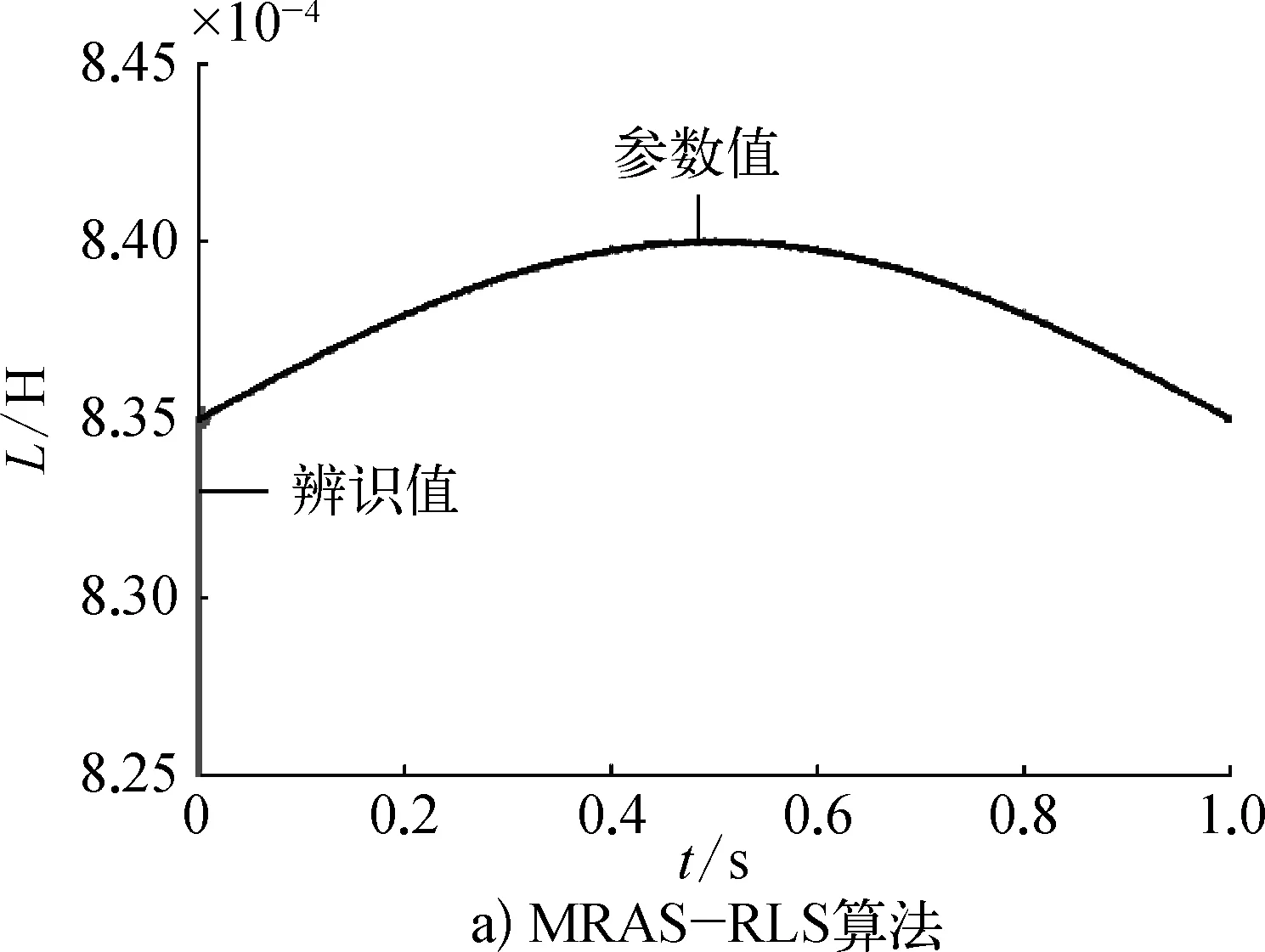
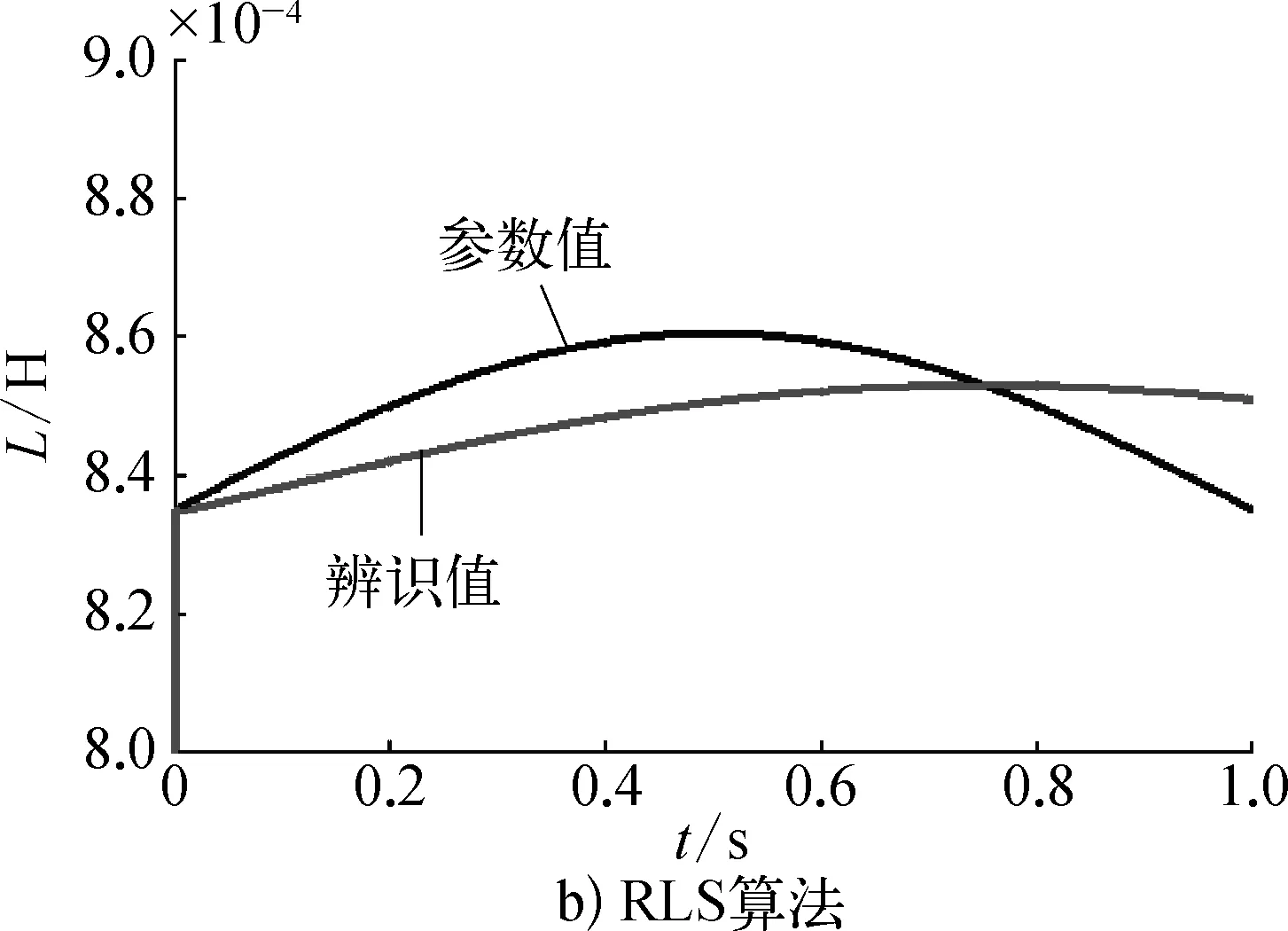
圖5 定子電感辨識結果


圖6 轉子磁鏈辨識結果

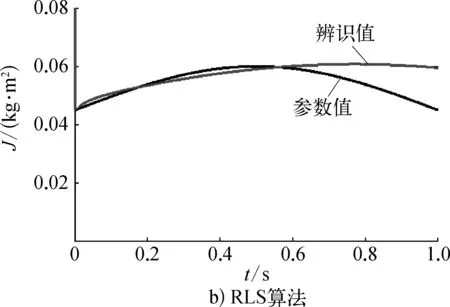
圖7 轉動慣量辨識結果
圖4~圖7中定子電阻、定子電感、轉子磁鏈、轉動慣量4個參數在MRAS-RLS算法中辨識前期波動都得到了較好的抑制,辨識值隨著時間推移越來越接近設置值,辨識誤差很小可以忽略。由于RLS算法隨辨識時間的增加,修正效果越來越小,不會影響MRAS算法穩態過程的辨識結果,所以引入了MRAS-RLS算法,改善了辨識的動態過程,而穩態過程與普通的模型參數自適應相同。
在電機運行過程中,負載突然變化最容易引起電機轉動慣量的突變。對于轉動慣量的突變情況,運用MRAS-RLS算法和RLS算法的仿真模型,對轉動慣量突變的情況進行仿真。在第0.3 s時使電機轉動慣量從0.045 kg·m2突變到0.065 kg·m2,MRAS-RLS算法和RLS算法對轉動慣量的辨識效果如圖8所示。
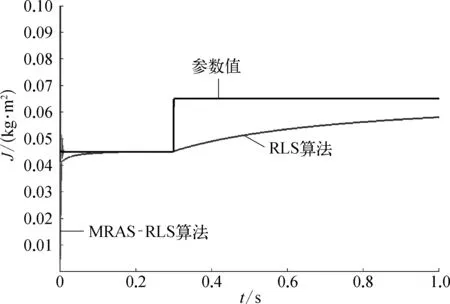
圖8 MRAS-RLS算法與RLS算法對轉動慣量突變的辨識結果
如圖8所示,轉動慣量在第0.3 s突變的情況下,MRAS-RLS算法辨識值在第0.3 s有個突變;突變之后立即可以準確地辨識出參數的值,在時間上基本沒有多少延遲,精確度基本也沒有誤差,證明MRAS-RLS算法對轉動慣量在電機運行中突變的情況,可以很好地做出辨識。而RLS辨識結果在第0.3 s時有個微小的增加變化,但是變化很緩慢,直到第1 s時才接近0.065 kg·m2,辨識過程很長。由此可以看出RLS算法對于時變參數辨識效果不佳。
4 結束語
本文提出了用MRAS-RLS算法對PMSM參數進行辨識,經仿真分析驗證MRAS-RLS算法對定常參數辨識的精度和速度都很高,對時變參數的辨識跟隨性很好,證明了MRAS-RLS算法的改進效果良好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
