預測PI算法在溫度控制實驗裝置上的開發與應用
2019-11-08 09:18:06張黎敏石紅瑞唐利峰
石油化工自動化 2019年5期
關鍵詞:實驗
張黎敏,石紅瑞,唐利峰
(東華大學 信息科學與技術學院,上海 201620)
溫度是實際應用中重要的控制參數,由于被控對象復雜程度逐漸提高,在控制溫度方面面臨許多問題。如何提高控制效果,滿足復雜系統的控制要求,是目前溫度控制領域重要的研究方向[1-2]。
貝加萊溫度實驗裝置具有大滯后、非線性和參數時變難于控制等特性,本文針對裝置大滯后特點,采用預測PI控制方案,在可編程序控制器(PLC)上開發了相應模塊,用ST語言在AS軟件上編寫控制程序實現對整個溫度對象的控制。
1 模型建立
采用實驗法建模,各溫區開環階躍響應曲線如圖1所示。
3個溫區的傳遞函數分別為
1)溫區N-1的傳遞函數:
(1)
2)溫區N-2的傳遞函數:
(2)
3)溫區N-3的傳遞函數:
(3)
從式(1)~式(3)中可以看出溫區N-2和N-3具有較大滯后。
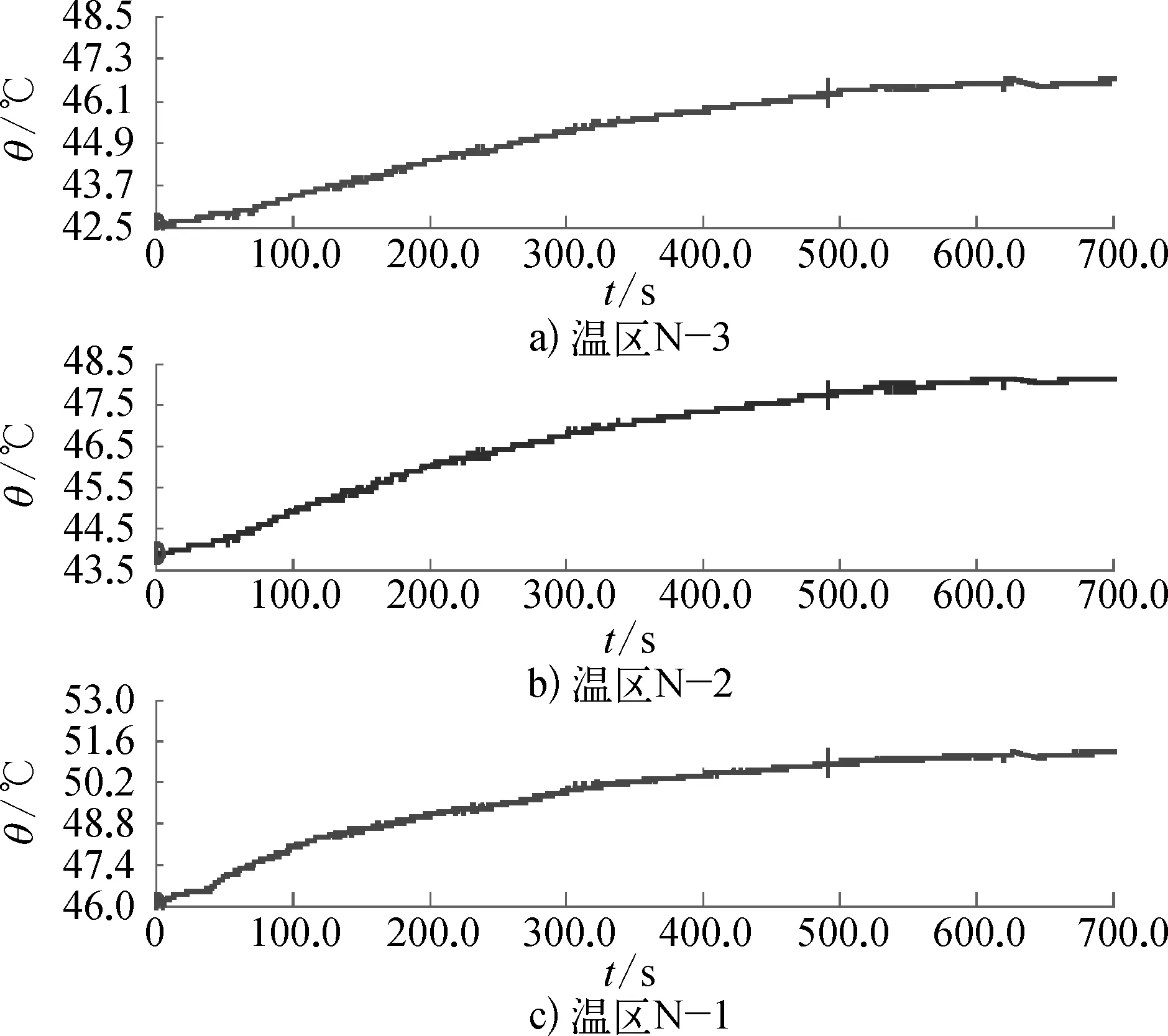
圖1 各溫區開環階躍響應曲線示意
2 預測PI控制方案
預測PI控制算法由Hagglund在1992年第一次提出,作為一種基于模型的控制算法,無需知道過程的精確模型,只要知道過程大致的模型即可。控制器的參數與實際過程的參數有著直接的關系,對于所要求的不同控制特性,可通過設置不同的控制器參數以獲得滿意的結果[3-5]。
從黃金到高速,兩任東家雖然領域不同,但都表示自己將進軍體育產業,然而隨著國企領導層的更換,那些奪冠的口號、看起來很美的產業規劃,沒有一家能夠將之真正落到實處。
實際工業上大多數過程都可以近似為一階加純滯后的模型,其傳遞函數為
(4)
式中:K0——靜態增益;T0——時間常數;L0——滯后時間。
假設控制系統所期望的閉環傳遞函數為
(5)
設控制器傳遞函數為GC(s),則:
(6)
經過數學推算,可以得到控制器的傳遞函數為
(7)
因此可得控制器的輸入輸出關系:
(1-e-L0s)U(s)
(8)
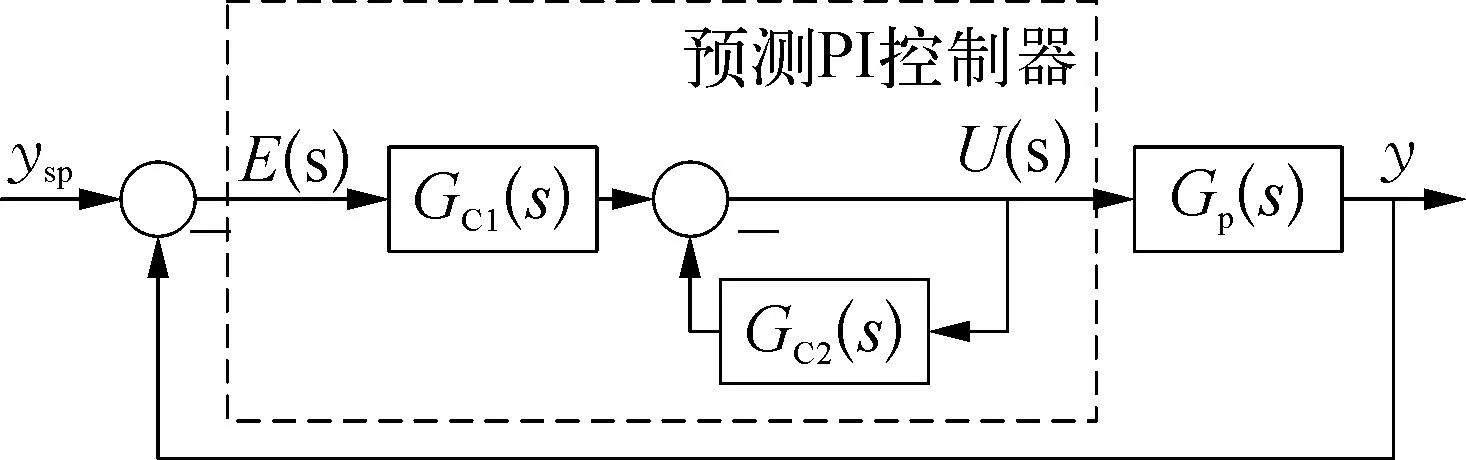
圖2 預測PI控制器結構示意
如式(8)所示,對于一階加純滯后系統,預測PI控制器PI控制項的比例常數大致為過程對象增益的倒數,積分時間為過程對象的時間常數;預測PI控制器預測項的參數則與過程對象的滯后時間和時間常數有關。
3 預測PI算法在PLC中的實現
將基于預測PI的溫度控制算法應用于貝加萊溫度實驗裝置;軟件部分在貝加萊Automation Studio平臺上完成,該軟件集編程開發、運動控制、界面制作等功能于一體[6],應用ST語言編程進行算法實現。
3.1 預測PI控制算法的離散化
將式(8)離散化得到控制算法離散增量表達式為
(9)
u(k)=u(k-1)+Δu(k)
(10)

3.2 控制器參數的確定
以溫區N-2為被控對象設計預測PI控制器,控制器僅有λ為可調參數。減小參數λ有利于提高預測PI控制系統的快速性;增大參數λ可以使系統的超調量減小,提高魯棒性和抗干擾性[7]。控制初期希望快速反應,達到設定值時希望穩定和高魯棒性,故取λ=0.1,以達到快速性的目的;當測量值接近設定值,即誤差小于0.4 ℃時,取λ=0.9,達到穩定和高魯棒性的目的。
3.3 預測PI控制算法的編程實現
由式(9)可得出預測PI控制器離散化增量表達式Δu(k),包括e(k),e(k-1),u(k-1),u(k-L),即計算控制量需要用到當前時刻、前一時刻的誤差及前一時刻、前L時刻的控制量。因此,需要存放并在線更新前L時刻的控制量,用隊列形式的數據緩沖區(_buff)可以實現。在AS軟件中用ST語言定義變量并編程計算,得到當前控制量增量Δu(k),再與上一時刻的控制量相疊加得到下一時刻的控制量。預測PI控制算法流程如圖3所示。
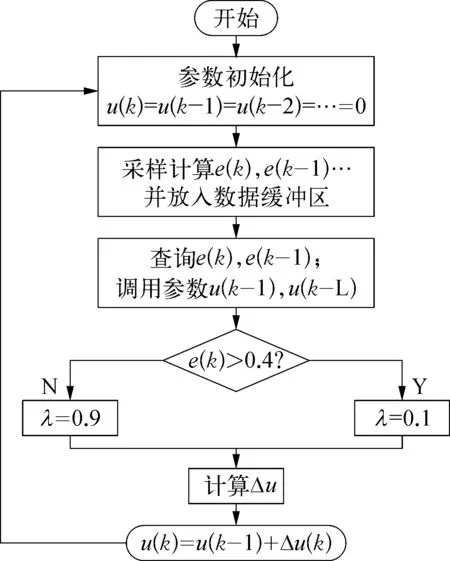
圖3 預測PI控制算法流程示意
4 溫度控制結果與分析
4.1 實驗一
被控對象選擇溫區N-2,根據溫區N-2的傳遞函數設計控制器參數為:K0=49,T0=210,L0=60,Ts=1 s。控制溫度檢測點2-2,使其由26 ℃上升至30 ℃,實驗結果如圖4所示。由實驗結果可得,最大超調量為0.7 ℃,調節時間67 s,穩態誤差為0 ℃。綜合性能指標可以看出,控制效果良好。
4.2 實驗二
被控對象選擇溫區N-3,控制器各參數保持不變。控制溫度檢測點2-3,使其由26.5 ℃上升至30.5 ℃,控制結果如圖5所示。由實驗結果可得,最大超調量為0.2 ℃,調節時間50 s,穩態誤差小于0 ℃。綜合性能指標可以看出,控制效果良好。
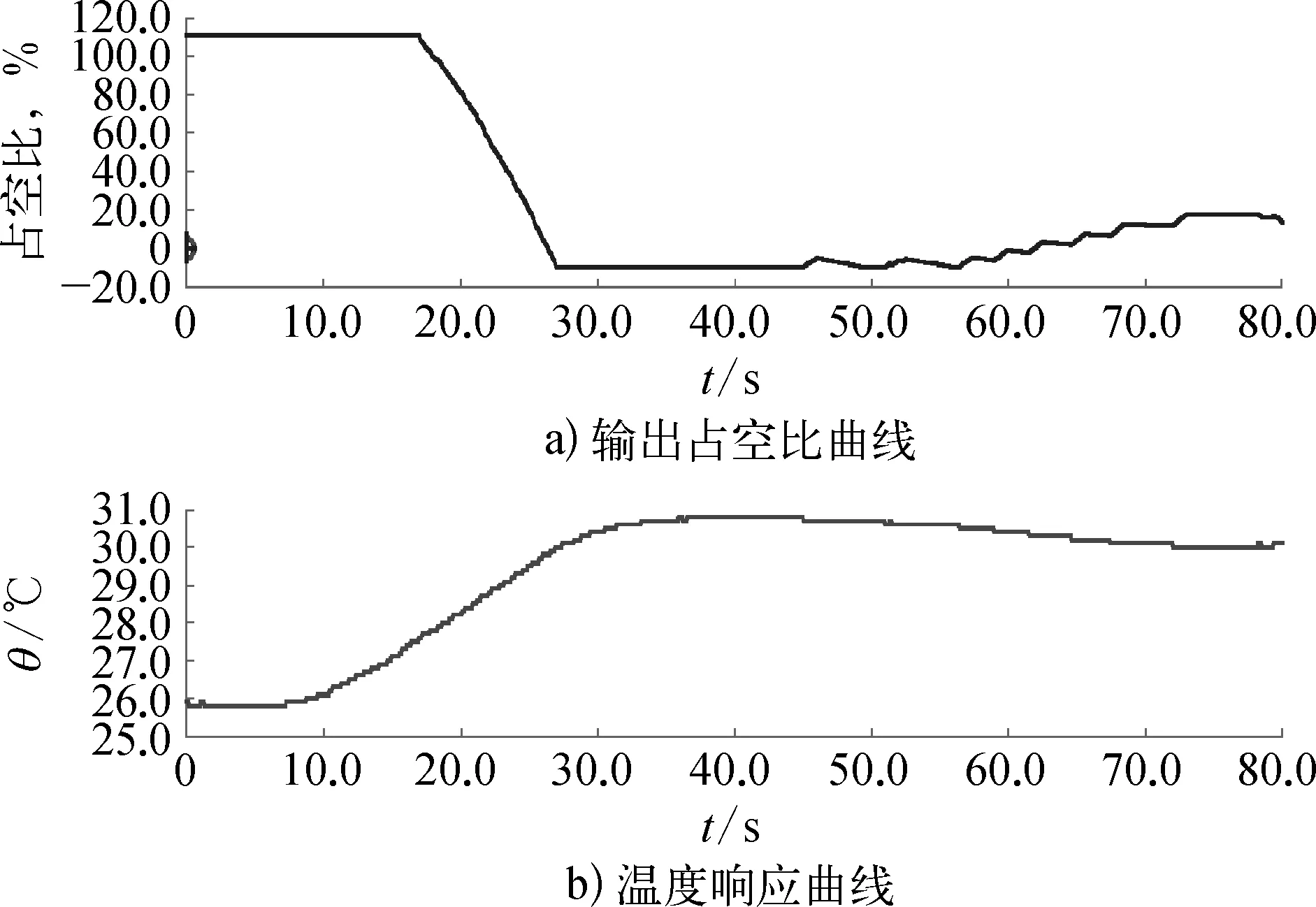
圖4 溫區N-2設定值階躍響應曲線示意
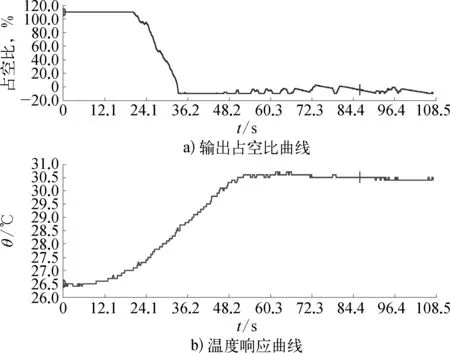
圖5 溫區N-3設定值階躍響應曲線示意
4.3 實驗三
被控對象選擇溫區N-1,仍保持控制器各參數不變。7 s時對處于50 ℃穩定狀態下的溫度檢測點2-1加入大功率風機干擾,68 s時將大功率風機關閉,得到溫區N-1抗干擾曲線如圖6所示。

圖6 溫區N-1抗干擾曲線示意
由實驗結果可以看出,在加入擾動的初期,溫度出現了波動,但隨著控制作用的實施,輸出占空比穩定在30%,溫度逐漸穩定;調節時間8 s表明控制器對外界干擾響應迅速,控制器的抗干擾能力良好。撤除風機干擾后,輸出占空比也很快做出了調整,并穩定下來。
5 結束語
基于預測PI的溫度控制方法在貝加萊溫度實驗裝置中取得了理想的控制效果: 首先控制器對不同被控對象的自適應能力很強,不同的被控對象可以使用相同的控制器進行控制,控制算法魯棒性強;其次加入擾動時能以盡量小的調節時間使占空比穩定下來,控制器有較強的抗干擾能力。前者代表控制算法可移植性強,對不同的對象進行控制時效果也更加穩定,后者代表縮短了調節時間,大幅降低了能耗,在實際工業生產中意義重大。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
