結合尺度不變特征的Super 4PCS點云配準方法
2019-11-09 03:18:32魯鐵定袁志聰鄭坤
遙感信息 2019年5期
關鍵詞:特征
魯鐵定,袁志聰,鄭坤
(1.東華理工大學,南昌 330013;2.流域生態與地理環境監測國家測繪地理信息局重點實驗室,南昌 330013)
0 引言
隨著三維激光掃描技術的快速發展,三維重建技術的應用越來越廣泛。點云配準是三維模型重建中的關鍵環節,點云配準按配準步驟可分為初配準和精配準[1]。初配準能夠很大程度上減小兩點云的旋轉和平移錯位,為精配準提供一個好的初始位置,提高配準精度和效率。常用的初配準[2-3]方法有主成分分析法、標簽法、中心重合法、4PCS算法[4-5]等。精配準是在初配準的基礎上對點云進行精確配準,使兩點云盡可能地重合,即兩點云的距離之和最小。應用最廣的精配準方法是由Besl和Mkcya提出的最近點迭代[6-7](ICP)算法。
近年來,Nicolas Mellado等[8-10]提出的Super 4PCS算法逐漸得到人們的關注。相對于4PCS算法,Super 4PCS算法利用智能索引極大地提高了點云初配準的速率[11],同時Super 4PCS也存在一些不足,當點云本身具有堆成性時容易出現錯誤匹配等。Rongchun Zhang等[12]結合Super 4PCS算法與旋轉影像完成點云配準,利用旋轉影像對Super 4PCS算法進行了優化。
針對Super 4PCS算法的不足,本文通過結合3D-SIFT[13-14]算法與Super 4PCS算法進行點云配準,利用3D-SIFT算法提取特征點,將整片點云縮至特征點集,縮短點對提取時間,同時提高點對提取的準確率,最后設計了實驗,比分析了相關算法的配準性能。
1 Super 4PCS算法原理
1.1 4PCS算法原理
4PCS算法亦稱為四點魯棒快速匹配算法,是一種全局快速匹配算法,其原理為:假設點云P,Q分別為源點云和目標點云,4PCS算法以共面不共線的四點作為配準點基,首先在點云P中選取4個共面不共線的點作為點基(點基稱作C),如圖1(a)所示,在P中選取的4點必須是P,Q重疊區域的點,然后在Q中利用點對間的距離與仿射不變性質尋找所有近似全等的點基集合D,D={D1,D2,D3,…,Dn}。由于目標點云中有很多點對并不符合要求,如圖1(b)所示,q′1q′2屬于錯誤匹配點對,q′1q′2與q3q4之間的角度不符合要求,利用C與Di進行剛體運動估計,得到二者的剛體變換Ti,即對P進行Ti變換后,Ti(P)與Q之間歐式距離平方和最小。
4PCS算法具有較好的配準精度,但是其時間復雜度達到了二次,效率不高。

圖1 點云與目標點云點基
1.2 Super 4PCS算法配準原理
在Super 4PCS[8]算法中,利用球體提取點對,大大提高了點對提取的效率。在點云Q中,以qi(i=1,2,…n),為球心,半徑為r做球面,圖2(a)為二維表達形式,在Q中可做n個球面,形成球面集合,給定一誤差限ε,落在區間[r-ε,r+ε]上的點都符合要求,如圖2(a)中藍色點所示。將點云Q進行不斷剖分,以陣列存儲落在區間[r-ε,r+ε]上的點(圖2(b)),圖中藍色點為提取的點對,黑色點為不符合要求的點,點對提取之后,利用仿射不變性質在Q中提取與p1p2p3p4對應的q1q2q3q4,令p1p2為r1,p3p4為r2,記Q中對應r1的點對集合為S1,對應r2集合的點對為S2,對S1S2中任意點對,計算并存儲對應的方向向量。利用仿射不變性質都能求得一交點e(圖2(c)),根據方向向量以及角度θ,給定區間[r-ε,r+ε],即可在Q中獲得唯一的四點,如圖2(d)所示。
2 改進Super 4PCS算法原理
2.1 3D-SIFT算法原理
尺度不變特征轉換特征提取算法(sale ivariant fature tansform,SIFT)最先應用在圖像處理中。3D-SIFT算法是由二維的SIFT[15]算法轉換而來的,利用點云的曲率值代替二維圖像的強度值,建立體素的尺度空間來提取特征點,3D-SIFT算法的主要原理[13]如下:
①建立點云的尺度空間。在三維點云空間中,通過體素柵格的方式建立點云體素金字塔,給定體素柵格的大小,求得體素所包含點云的重心,以其重心近似代替該體素內所包含的點云,可用公式表達為:
(1)
式中:Ii(x,y,z,σ)為第i個體素柵格點云數據的重心坐標;pk為第i個體素柵格中第k個點的三維坐標;n為第i個體素柵格中點的數量;Ii(x,y,z,σ)組成的集合為原點云在尺度下σ下的采樣點云。
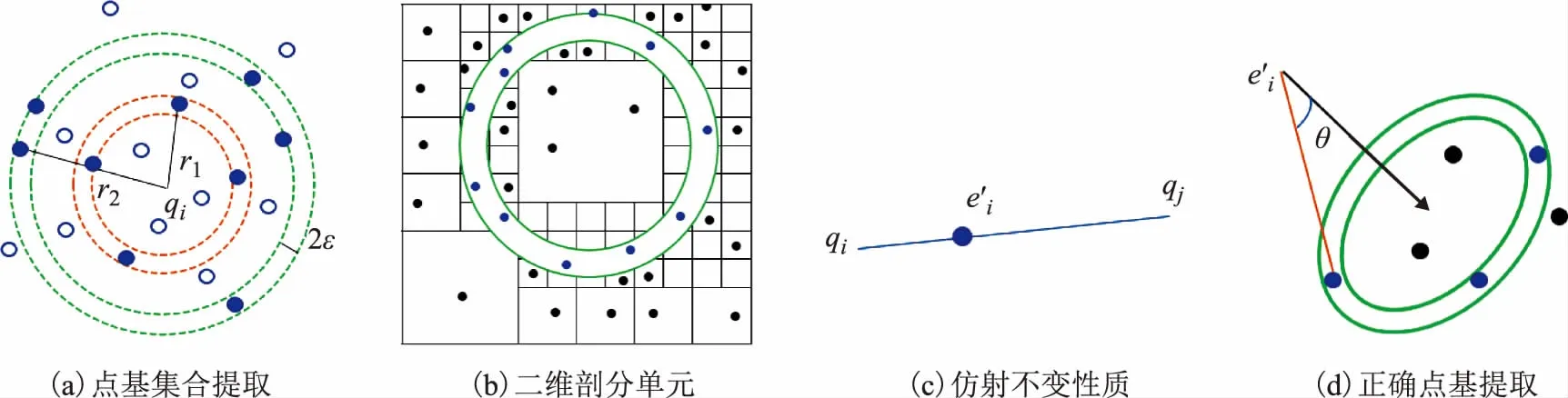
圖2 Super 4PCS算法點基提取
②建立點云高斯差分尺度空間。在步驟①中構建了點云的體素金字塔,設金字塔共有m組,每組有S層,則第s層的尺度為:
(2)
式中:σ0為點云的初始尺度;σs為點云金字塔第s層的尺度。
計算每個高斯空間尺度下采樣點的高斯過濾響應值F,以及采樣點相鄰尺度的高斯差分值DOG。對采樣點及距離3σ鄰域范圍內的點進行曲率值高斯加權,高斯過濾響應值F和DOG高斯差分值的計算公式可表示為:
(3)
(4)
DOG=F-Fpre
(5)
式中:ρi為采樣點第i個近鄰點的曲率;wi的表達式如式(4)所示,d為采樣點到鄰域點的距離;σ為當前尺度空間的大小;式(5)中Fpre為上一尺度的高斯過濾響應值。
③檢測DOG尺度空間極值點。若某點的DOG值相比其鄰域范圍內的點的DOG值為極值,以及相鄰上下2個尺度鄰域范圍內的DOG相比仍為極值,確保其在點云空間與尺度空間均為極值點,則記該點為特征點。
2.2 結合SIFT特征點的Super 4PCS算法
Super 4PCS算法具有很快的配準速度,但當點云具有對稱性時(見算例2),Super 4PCS算法點對識別易出錯,針對以上問題,提出了一種結合點云SIFT特征的Super 4PCS算法,其主要步驟可描述為:
①源點云與目標點云的SIFT特征提取,利用3D-SIFT算法能直接對點云進行特征點提取,將點云縮至特征點集,保留點云的主要成分,降低點云噪聲對配準結果的影響,更加凸顯點云的局部特征。
②以提取的SIFT特征點作為Super 4PCS算法的輸入點云,特征點是目標的特征部分,易于提取與識別,能提高Super 4PCS算法同名點對的識別度,不用遍歷原先整片點云,搜索源點云與目標點云的特征點即可,減少點對搜索的時間,使點對匹配更加準確。
③經過Super 4PCS算法點對提取后,在源點云中選取一定數量的采樣點,對采樣點進行剛體變換。以采樣點與目標點云中最近點距離之和作為評價分數值,選取評價分數值最小的剛體變換參數作為最終的變換參數,實現源點云與目標點云的配準。
④通過配準后同名點的均方根誤差來評價點云配準精度,公式為:
(6)
式中:Xi為源點云與目標點云的第i對同名點的坐標差值;n為對應點的個數。
本文算法的技術路線圖如圖3所示。

圖3 本文算法技術路線圖
3 實驗與分析
3.1 經典斯坦福兔子點云配準
為了驗證本文算法的性能,以標準斯坦福兔子作為實驗數據,對比分析SIFT算法、Super 4PCS算法以及本文算法的配準效果;相關結果如圖4所示(配準結果由Geomagic studio 2013軟件顯示),黑色點云為源點云,藍色點云為目標點云。
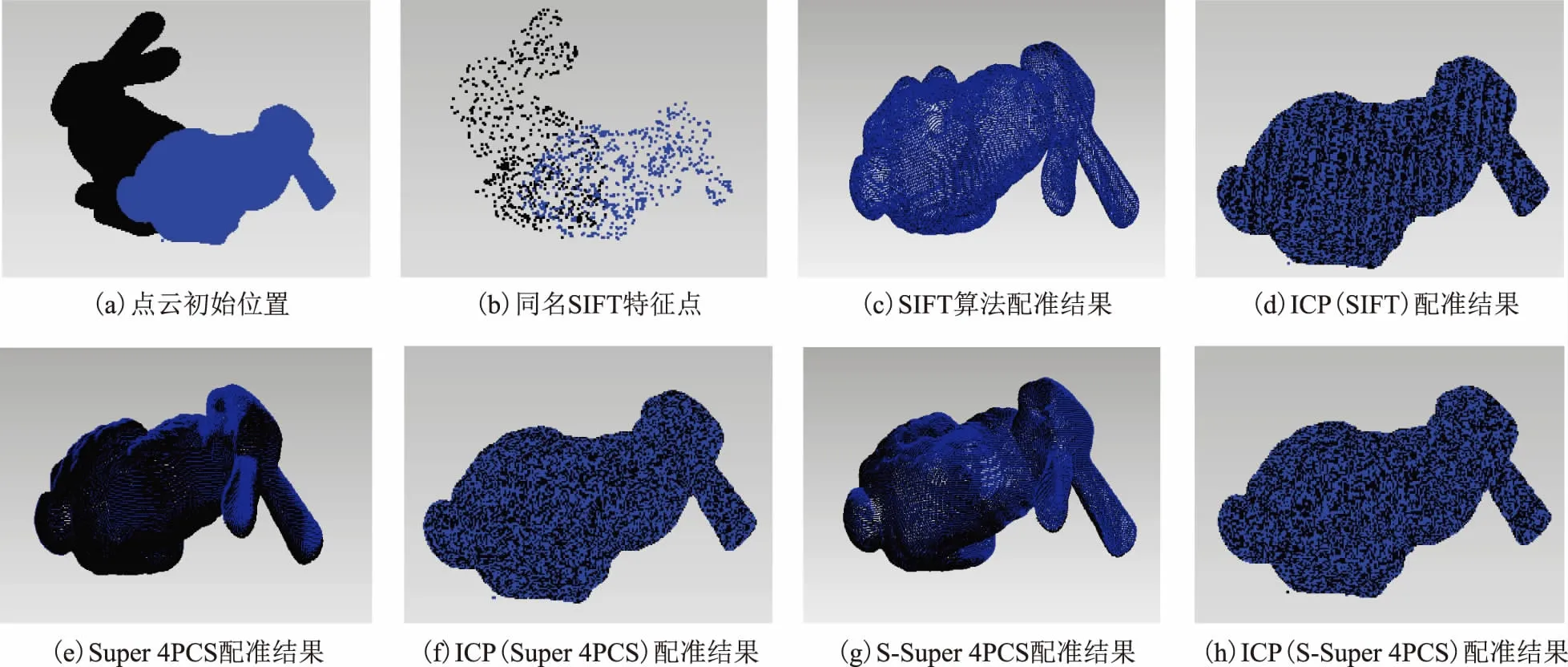
圖4 斯坦福兔子點云配準結果
由圖4(a)可知,兩點云既存在平移位錯又存在旋轉位錯,直接利用ICP算法配準無法達到預期配準效果;圖4(b)為提取的同名特征點,可以看出斯坦福兔子的輪廓基本被提取出來。根據同名點可以直接估計出點云的剛體變換參數,配準結果如圖4(c)所示,可以看出兩點云基本重合,為ICP精確配準提供了一個良好的初始位置。圖4(d)為ICP精配準結果,經過ICP配準后,兩點云實現了精確配準。圖4(e)為Super 4PCS算法的配準結果,可看出配準后縮小了兩點云間的差距;圖4(f)為ICP精配準結果,精配準后,兩點云間的差距進一步縮小。圖4(g)為結合特征點的Super 4PCS算法配準結果,以提取的SIFT特征點作為輸入數據,再通過Super 4PCS算法求解剛體變換,可看出兩點云的旋轉和平移位錯基本消除,源點云與目標點云分布均勻。與其他兩種算法配準效果基本相當,圖4(h)為ICP精配準結果,可以看出源點云與目標點云已經完全重合在一起。從斯坦福兔子配準的視覺效果來看,3種算法配準結果基本相當。
表1給出了3種配準方法的速度與精度指標,從配準時間來看,由于SIFT算法需要先確定兩點云初始對應關系,初始對應關系確定后往往存在錯誤的對應關系,刪除錯誤的對應關系也要花費大量時間,增加了算法的時間復雜度,所以,SIFT算法配準速度最慢。Super 4PCS算法快于SIFT算法,耗時1.54 s;本文算法在特征提取等預處理階段需要花費一定時間,但后期具有更快的配準速度,僅花費0.3 s就完成了配準。本文算法配準后ICP精配準耗時2.50 s,Super 4PCS算法配準后ICP精配準耗時2.65 s,SIFT算法配準后ICP精配準耗時2.15 s;從配準精度來看,以均方根誤差作為評價指標,由于是標準的模型數據,3種方法配準精度都很高,都達到了mm級,SIFT算法利用抽樣一致性算法刪除了錯誤點對,配準精度最高;本文算法配準精度為2 mm,優于Super 4PCS算法配準精度。經過ICP精確配準后,三者的配準精度達到了10-5數量級,實現了源點云與目標點云的精確配準。

表1 斯坦福兔子配準結果
3.2 亭子點云配準
為了進一步驗證本文算法應用在實測數據上的性能,以實測的亭子為例,現分別用SIFT算法、Super 4PCS算法和結合2種算法的方法(S-Super 4PCS)對點云進行拼接,配準結果如圖5所示,黑色點云為源點云,藍色點云為目標點云。

圖5 亭子配準結果
如圖5(a)所示,源點云與目標點云存在很大的旋轉和平移位錯;圖5(b)為亭子出口的實景圖,作為配準結果的參照圖;圖5(c)為源點云與目標點云的SIFT同名特征點,3D-SIFT算法有效地提取了源點云與目標點云的特征部分,將整個點云數據集縮小至特征點集;圖5(d)為SIFT算法的配準結果,可看出亭子頂部仍然存在錯位,由于數據為實測的數據,不可避免的存在噪聲,且源點云與目標點云嚴格的同名點可能并不存在,導致其配準效果并不是太好;圖5(e)為SIFT算法配準結果亭子出口部位的放大圖,可看出亭子的臺階并沒有重合在一起;圖5(f)為Super 4PCS算法的配準結果,由于亭子點云本身具有對稱性,局部特征不明顯,出現了錯誤匹配的結果。圖中紅色框區域為亭子出口,經過Super 4PCS算法配準后,源點云亭子出口部位匹配到目標點云欄桿部位,在圖5(g)中可以看到紅色框中的黃色點云為一欄桿,并不是源點云亭子的出口;圖5(h)為結合3D-SIFT算法與Super 4PCS算法的配準結果,可以看出,經過本文方法配準后,兩點云的旋轉和平移位錯得到了改善,亭子頂端基本重合在一起,紅色框區域對應源點云與目標點云的亭子出口,實現了源點云與目標點云的正確拼接,特征點集減弱了噪聲的影響,凸顯了點云數據集的局部特征,提高了點對匹配的準確性;從圖5(i)的局部放大圖可看出,紅色框部分藍色點云與黃色點云對應為亭子出口的階梯,二者重合效果優于SIFT算法的配準結果;圖5(j)、圖5(k)、圖5(l)為3種方法配準后利用ICP精配準的結果,經過ICP配準后,源點云與目標點云的位錯在初配準上進一步得到改善,從視覺效果來看,結合SIFT算法與Super 4PCS算法的配準效果最優。
表2為3種配準方法對應的定量指標,從配準時間來看,本文算法后期配準耗時13.61 s,優于Super 4PCS算法的35.82 s,遠遠快于SIFT算法的配準速度;從配準精度來看,本文算法的配準精度為0.222 m,SIFT算法的配準精度為0.231 m,本文算法效果更好,Super 4PCS算法出現了錯誤配準結果;相比Super 4PCS算法而言,本文算法將點云縮至特征點集,減弱了噪聲對配準結果的影響,同時凸顯了點云的局部特征;本文算法初配準后,利用ICP算法對點云進行精確配準,耗時3.63 s,配準精度為2.6 cm,進一步縮小了點云間的差距。
通過實測數據配準結果表明,本文算法具有更好的配準性能,驗證了本文算法的可行性。

表2 亭子配準結果
4 結束語
點云配準是點云數據處理中的熱點問題,針對傳統的配準算法效率低等問題,本文提出一種結合SIFT特征的Super 4PCS點云配準方法,通過對源點云與目標點云進行特征提取,充分利用點云的局部特征,提高了Super 4PCS算法點對識別的準確性;將源點云與目標點云縮至特征點集,既保留了點云的主要成分,又縮短了點對的搜索時間,提高了算法的配準效率;通過實驗對比分析了SIFT算法、Super 4PCS算法以及本文算法在斯坦福兔子和實測點云數據上的配準性能,本文算法在前期特征提取需要花費一定時間,但后期具有更快的配準速度,總體性能更優,能為精配準提供一個良好的初始位置。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38