一種通過圖像處理的實時車速計算改進模型
2019-11-11 08:17:08羅博峰
計算機時代 2019年10期
羅博峰


摘 ?要: 車速檢測是保證交通安全的重要手段。動態(tài)特征速度檢測可以有效地分析汽車駕駛特性和交通流,有助于開發(fā)智能交通系統(tǒng)。雷達測速儀和激光測速儀成本相對較高,精度不夠,只能測量一瞬間的速度。因此提出一種結(jié)合車輛特征點識別的快速圖像車速檢測方法。首先,篩選出車上的特征點,用一定的跟蹤方式跟蹤該點,再對獲取到的圖像進行逆透視變換,通過一定比例關(guān)系換算出實際速度。該系統(tǒng)實現(xiàn)了車輛速度的實時檢測,有助于智能交通系統(tǒng)的研究。
關(guān)鍵詞: 圖像處理; 實時跟蹤; 快速檢測; 車速識別
中圖分類號:TP311 ? ? ? ? ?文獻標志碼:A ? ? 文章編號:1006-8228(2019)10-28-04
Abstract: Speed detection is an important means to ensure traffic safety. Dynamic feature velocity detection can effectively analyze the driving characteristics and traffic flow of automobiles, which is helpful to the development of intelligent transportation system. Radar velocimeter and laser velocimeter are relatively high in cost and not accurate enough, and can only measure the instantaneous speed. Therefore, an image based fast speed detection method with vehicle feature point recognition is proposed. Firstly, the feature point on the vehicle is filtered out and tracked by a certain tracking method. Then the obtained images are transformed by inverse perspective and the actual speed is worked out through a certain proportion relationship. The system realizes the real-time detection of vehicle speed and is helpful to the research of intelligent transportation system.
Key words: image processing; real-time tracking; fast detection; vehicle speed recognition
0 引言
道路交通信息的準確實時獲取是智能交通系統(tǒng)中最關(guān)鍵的環(huán)節(jié),實時速度是智能交通系統(tǒng)中最基本的動態(tài)信息之一。速度檢測是智能交通系統(tǒng)的基礎(chǔ)和前提。為了控制速度,確保道路安全,有必要檢測車輛的實時速度,實際上交通監(jiān)控和報警等事件對車輛速度,交通管理部門可以相應(yīng)地處理。
1 現(xiàn)狀分析
目前車速檢測主要有三種方法:①雷達探測技術(shù);②埋地感應(yīng)線圈檢測技術(shù);③基于視頻圖像的車速測量。雷達探測技術(shù)具有廣泛的速度測量特性,高精度和不受天氣條件的影響[1]。循環(huán)探測器技術(shù)穩(wěn)定性強,測量精度高,適應(yīng)性強[2]。視頻圖像在速度檢測的方式是在兩個已知點之間拍攝求速度[3]。
1984年,視頻車輛檢測系統(tǒng)自檢器最初是由明尼蘇達大學(xué)的建立,這是第一次視頻處理技術(shù)應(yīng)用于實際的交通檢測系統(tǒng)[4]。Binyu Mei可以通過將道路特征點與車載視覺頭匹配來擬合車輛的移動距離,得到車速[5]。黃丹丹提出一種幾何特征,通過車牌識別,判斷空間位置之間的關(guān)系,得到汽車的行駛速度[6]。
本文提出了一種基于特征點識別的區(qū)間速度實時檢測系統(tǒng)。首先通過收集環(huán)境中的特征點對圖片進行變換,每個特征點的坐標轉(zhuǎn)換為真實的世界坐標。然后進行檢測特征點。最后通過一定比例運算,得到速度指標。
2 設(shè)計
2.1 硬件設(shè)計
測速系統(tǒng)硬件由攝像機一臺、數(shù)據(jù)采集卡一張和一臺計算機組成。
2.2 系統(tǒng)原理
測量一個物體的速度,我們需要知道對象的距離[Δs]經(jīng)過一定時間[Δt],物體的速度是通過[v=Δs/Δt]求得。
視頻圖像的速度測量,收集視頻的每一幀之間的時間間隔是固定的得到[Δt],通過計算每一幀圖片中特征點的像素位移得到[Δs]。
2.3 軟件架構(gòu)
基于圖像處理的速度檢測軟件主要由視頻采集、圖像預(yù)處理、運動分割、特征點跟蹤、車速計算五個部分組成。
3 數(shù)學(xué)模型
3.1 預(yù)處理
按照處理順序依次包括:
灰度處理,線性插值法高斯金字塔,歸一化。
3.2 運動分割
考慮到需要達到實時監(jiān)測并且需要較好的檢測效果,本文采用碼書法。
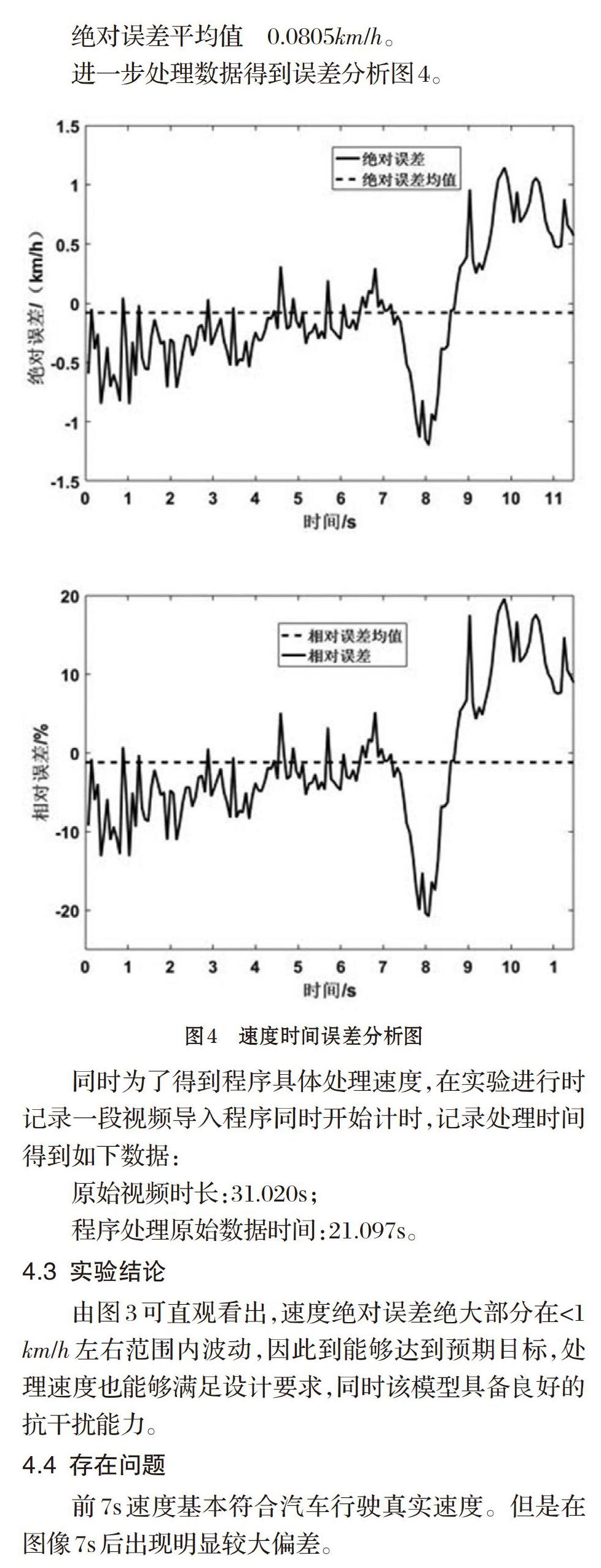
同時為了得到程序具體處理速度,在實驗進行時記錄一段視頻導(dǎo)入程序同時開始計時,記錄處理時間得到如下數(shù)據(jù):
原始視頻時長:31.020s;
程序處理原始數(shù)據(jù)時間:21.097s。
4.3 實驗結(jié)論
由圖3可直觀看出,速度絕對誤差絕大部分在<1[km/h]左右范圍內(nèi)波動,因此到能夠達到預(yù)期目標,處理速度也能夠滿足設(shè)計要求,同時該模型具備良好的抗干擾能力。
