萊維飛行優化果蠅算法在光伏MPPT中的研究
2019-11-12 11:38:42趙其浩李田澤邵泰衡吳繁言王坦坦
現代電子技術 2019年20期
趙其浩 李田澤 邵泰衡 吳繁言 王坦坦

摘 ?要: 實際工程中光伏陣列因局部遮擋引起局部陰影,造成輸出的PU曲線呈現多峰值現象,傳統方法進行最大功率點跟蹤時,在跟蹤精度、速度和最大功率點處振蕩性都存在不足。為解決這些不足,在果蠅算法對多峰函數尋找最優解速度快的基礎上,提出一種萊維飛行優化果蠅算法(LF?FOA)的光伏最大功率點跟蹤策略。該方法以果蠅算法為主體,使用萊維飛行與果蠅算法相結合,增加其全局搜索能力,同時引入最劣解對果蠅運動步長進行修改,改進后的算法使果蠅以大小步長進行搜索,搜索的范圍更加均勻,避免陷入局部尋優。通過函數仿真測試與Matlab/Simulink建模仿真,證明了LF?FOA算法能夠逃離局部尋優,尋優時速度更快,精度更高,最大功率點處的振蕩性更小。
關鍵詞: 光伏陣列; 多峰值; 最大功率點跟蹤; 萊維飛行; 果蠅算法; 最劣解
中圖分類號: TN911?34; TP301.6 ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2019)20?0076?05
Research on Levy flight optimization Drosophila algorithm in photovoltaic MPPT
ZHAO Qihao, LI Tianze, SHAO Taiheng, WU Fanyan, WANG Tantan
(School of Electrical and Electronic Engineering, Shandong University of Technology, Zibo 255049, China)
Abstract: In practical projects, the multi?peak phenomenon appears in the output PU curves of photovoltaic arrays due to local shadows caused by partial occlusion. Common methods have some shortcomings in tracking accuracy, speed and oscillation at the maximum power point. To overcome these shortcomings, based on the fast searching speed for the optimal solution of multimodal function by the Drosophila algorithm, a photovoltaic maximum power point tracking strategy for the LF?FOA is proposed, which takes the Drosophila algorithm as the main body and combines the LV flight with the Drosophila algorithm to increase its global searching ability. When the worst solution is introduced to modify the movement step size of Drosophila melanogaster, the improved algorithm conducts the Drosophila melanogaster search with the big and small step sizes, which makes the search scope more uniform and avoids falling into local optimization. The results of function simulation test and MATLAB / Simulink modeling simulation prove that LF?FOA algorithm can escape from local optimization, and has faster optimization speed, higher precision and less oscillating at maximum power.
Keywords: photovoltaic array; multi?peak; maximum power point tracking; Levy flight; Drosophila algorithm; worst solution
隨著石油、煤等傳統能源的枯竭,世界各國對新型環保能源的開發和利用越來越重視。太陽能作為清潔、可再生能源,已成為各國重點關注的對象[1]。太陽能發電作為太陽能利用的主要形式,其存在轉化效率較低的缺點。為提升光伏發電的轉化效率,降低成本,必須對光伏系統進行最大功率點跟蹤(MPPT)[2]。
針對最大功率點跟蹤的研究,傳統恒定電壓法進行跟蹤時,收斂精度和速度較差[3]。粒子群算法作為常用MPPT智能算法,其參數比較多,取值設置比較繁瑣,同時搜索范圍大,尋找最大功率點較慢,并且搜索隨機,震蕩性比較大[4?6]。
果蠅優化算法是近年來提出的一種新型智能算法,目前果蠅算法在數據挖掘、求解數學函數極值等很多領域得到應用[7?8]。本文在原始果蠅算法對多峰函數尋找最優解速度快、設置參數少的基礎上,使用萊維飛行優化果蠅算法,同時在優化中引進最劣解,并將其首次應用到MPPT中,改進后的算法提升了收斂速度和尋優精度。通過仿真驗證了算法的優越性,并與常用的擾動觀察法在陰影條件下進行仿真對比,證明了本文算法的有效性。
1 ?陰影下光伏電池建模及輸出特性
1.1 ?陰影下光伏電池建模
本文采用文獻[9]中光伏電池的修正新模型,在光照相同的情況下,其數學模型為:
式中:I為光伏陣列輸出電流;U為光伏陣列輸出電壓;ISC為短路電流;UOC為開路電壓;C1和C2為修正參數;NS為串聯陣列中的光伏電池個數;NP為串聯陣列的并聯個數。
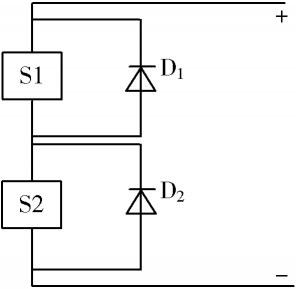
在實際工程中,為了避免熱斑效應,會對光伏電池并聯單個二極管,如圖1所示。
圖1 ?兩光伏組件串聯結構圖
當S1的光照強度大于S2時,S1產生的電流ISC1大于ISC2,此時并聯旁路二極管導通,只有S1對外進行輸出。隨著外接負載電阻的增大,輸出電流逐漸減小,當S2產生的電流與S1輸出電流相同時,并聯的旁路二極管處于阻斷狀態,此時S1和S2同時進行功率輸出。根據旁路二極管的導通與關斷狀態,串聯電池的電流特性可為:
1.2 ?陰影下光伏電池輸出特性
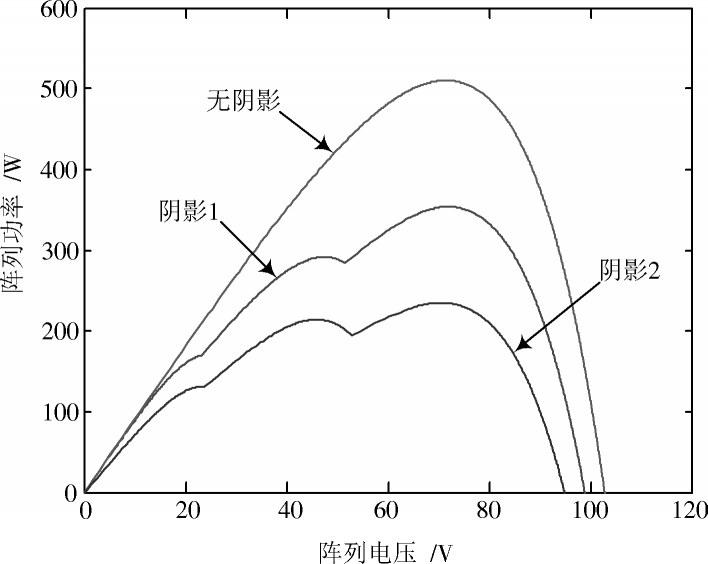
采用三組件串聯的形式在Matlab中進行仿真,對有陰影和無陰影情況進行測試。采用某型號的光伏電池,參數為:ISC=9.2 A,VOC=34.2 V,IM=7.95 A,VM=20 V。陰影1光照強度依次為1 000 W/m2,800 W/m2,600 W/m2;陰影2光照強度依次為800 W/m2,600 W/m2,400 W/m2;仿真結果如圖2所示。
圖2 ?無陰影及陰影下P?U曲線
2 ?萊維飛行優化果蠅算法的研究
2.1 ?果蠅算法
果蠅算法(FOA)是基于果蠅覓食行為推演出的一種能夠進行全局尋優的最新方法。果蠅自身擁有較強的嗅覺和視覺能力,能夠通過分辨空氣中食物的各種氣味,快速確定食物所處的大概位置,然后利用其視覺能力快速地飛行到食物所在的位置[10]。多個果蠅聚集到一起進行食物尋找就形成了一種群體智能尋優算法。
2.2 ?萊維飛行
萊維飛行是由法國的數學家Paul Lévy提出的一種概率分布。萊維飛行是一種隨機游走的搜索方式,在搜索的過程中會出現較大的躍動,運動方向也會產生劇烈變化,這樣就使得算法可以跳出局部尋優。萊維飛行的搜索路徑采用文獻[10]中的計算公式:
2.3 ?LF?FOA算法及運行流程
本文通過引入萊維飛行優化果蠅算法,在此基礎上又引入最劣解對果蠅運動步長的變化進行修改,提出了一種基于萊維飛行優化果蠅算法(LF?FOA)的改進算法。
LF?FOA算法以果蠅算法為主體,先將果蠅算法與萊維飛行相結合,然后引入最劣解(Xworst,Yworst),最劣解為上一次迭代中出現的個體最差值,將其作為步長大小修改的參考量,可以使果蠅以大小步長飛向原本的小概率區域,使得搜索的范圍更加的均勻。仿真結果表明了改進后效果更優秀,實現了更好的全局尋優。LF?FOA算法在光伏最大功率點跟蹤流程如下:
1) 對果蠅位置的隨機初始化,初始值Init U_axis,Init P_axis,同時設定種群規模Sizepop和最大迭代次數Maxgen。
2) 賦予果蠅個體利用嗅覺尋找食物的運動方向和運動距離。
3) 由于最優解的位置是未知的,先估計果蠅與原點的位置距離Dist,再計算味道濃度的判定值S,其取值為Dist的倒數。
4) 將上面求得的S代入味道濃度判斷函數(Fitness Function)式(3)的功率表達式,求出每個味道濃度判定值對應的果蠅味道濃度(Smelli)。
5) 找出該果蠅群體中味道濃度最大和味道濃度最差的果蠅。
6) 保留味道濃度最優值與相對應的(U,P)的坐標,保留味道濃度最劣值和其對應的坐標,此時果蠅利用視覺能力飛往味道濃度最優位置。
7) 進入迭代尋優環節,利用式(12)替代式(6)對果蠅位置進行和運動距離進行修改,其中α的取值定為0.01。
8) 執行完步驟7)以后,執行步驟3)~步驟5)。然后將得到最優解與上一次進行對比,如果優于上一次則保存,并將對應的坐標保存,反之不保存。最劣解無需對比,直接以當前計算的值進行保存,并保存相應坐標用于下次迭代。
9) 重復執行步驟7)、步驟8),直至當前的迭代次數達到設定的Maxgen,或者達到目標函數的最優理論值,則完成算法迭代。
3 ?LF?FOA算法驗證及仿真分析
3.1 ?LF?FOA算法可行性驗證
為了驗證優化后算法的性能,本文通過使用Sphere函數和Rastrigin函數兩個典型函數對新的算法進行驗證,函數形式如下:
1) Sphere函數
2) Rastrigin函數
圖3展現了FOA在對Sphere函數進行尋優時,陷入了局部尋優,而LF?FOA算法則跳出局部尋優,對最優解尋求更準確;在對Rastrigin函數尋優時可以看出,LF?FOA算法尋優速度更快,在100次迭代時就找到最優解,而FOA要在200次迭代時才能尋找到最優解。由此可以看出LF?FOA算法在尋優速度上比FOA要快很多,同時可以跳出局部尋優。
圖3 ?兩函數適應度迭代尋優曲線
以上的函數驗證可以得出LF?FOA算法性能優于FOA算法,證明了改進算法的可行性。
3.2 ?LF?FOA算法在MPPT中的仿真分析
為進一步證明本文方法的有效性,將本文所使用的LF?FOA算法與常用的擾動觀察法在Matlab/Simulink中進行最大功率點跟蹤的仿真,通過對比來驗證本文算法的有效性。光伏電池組件采用三組件串聯的形式,最大功率跟蹤框圖如圖4所示。
圖4 ?光伏最大功率跟蹤框圖
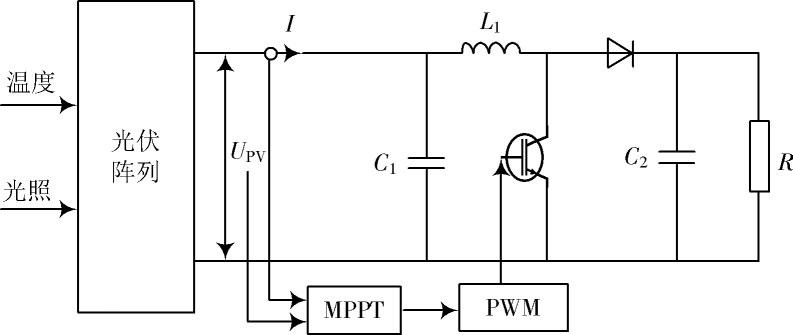
框圖中包含:Boost電路、MPPT控制器、PWM、光伏陣列以及負載電阻。其中,C1為1 μF,C2為470 μF,L1為5 mH,仿真時間設定為1 s,光伏組件參數與第一節中相同。LF?FOA算法種群規模Sizepop設置為100,最大迭代次數Maxgen設置為50。
在陰影1的情況下,用擾動觀察法和本文方法對最大功率點進行跟蹤,結果如圖5所示。
圖5 ?陰影1下P&O與LF?FOA的MPPT仿真對比
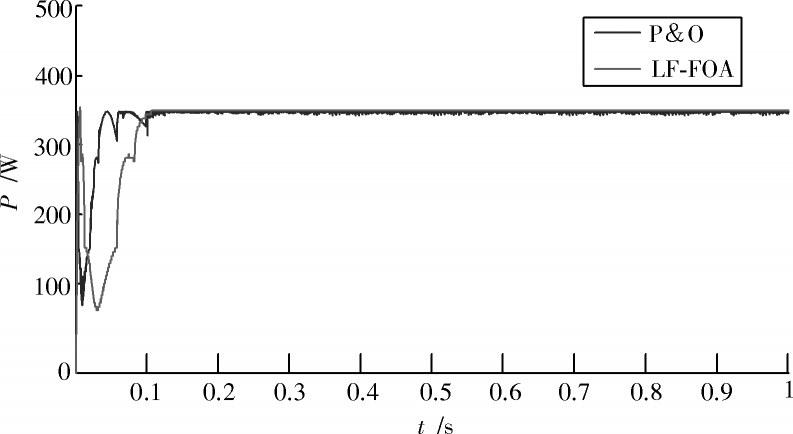
圖5為光照處于陰影1的恒定情況下的仿真曲線,溫度為25 ℃,光伏整列輸出功率為353.70 W。從圖5中可以看出,初始時Boost電路要進行充電,所以波動較大。圖5中實線為擾動觀察法的MPPT仿真,擾動觀察法在進行MPPT過程時,其在MPPT處來回振蕩,振蕩幅度比較大,并且其精度比較低。從仿真圖中可以看出曲線比較粗糙,波動比較大。圖5虛線為本文方法的仿真曲線,可以看出收斂速度較快,LF?FOA在收斂后功率為353.68 W,與光伏陣列的最大功率相差0.02 W,對比擾動觀察法,尋優精度更高,誤差更小,在穩定后輸出非常平穩,輸出功率穩定在最大值。
通過上述分析可知:擾動觀察法在進行多峰值最大功率點跟蹤時,精度比較低,震蕩大,在進行變光照分析時,與其進行對比意義不大,所以進行變光照分析時,只采用LF?FOA算法進行仿真分析。
將光照在0.5 s時,由陰影1變化到陰影2得到圖6仿真曲線。
圖6 ?LF?FOA的變光照MPPT仿真
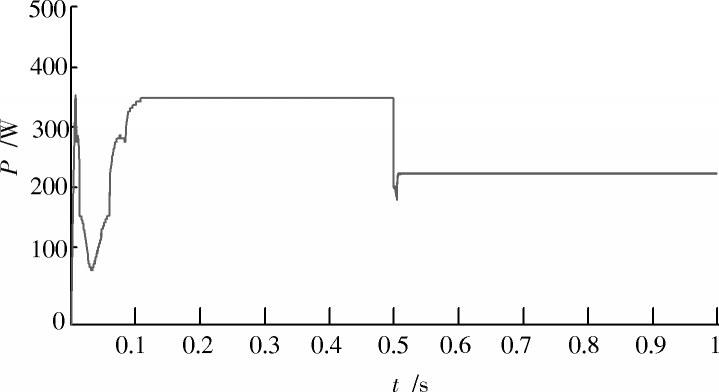
由圖6可以明顯看到,當光照突變時,引起功率發生變化,本文采用的算法快速重啟,在0.5 s時進行重新跟蹤,經過輕微震蕩后,快速收斂。當光照從陰影1變化為陰影2時,光照強度下降,尋找到最大功率點為234.55 W,與光伏陣列輸出功率相差0.03 W,誤差小。
通過以上的仿真分析與對比,可以知道LF?FOA算法在進行最大功率跟蹤時,收斂速度快,精度高。當光照發生變化時,也能對最大功率點進行快速、可靠的跟蹤,對于提升光伏系統的效率具有十分重要的作用,證明了LF?FOA算法的有效性。
4 ?結 ?論
本文通過引進萊維飛行優化果蠅算法,并引入最劣解修改果蠅步長,改進了果蠅算法收斂速度慢,容易陷入局部尋優的缺陷,通過函數驗證了LF?FOA算法的優越性。在Matlab中進行光伏系統最大功率點跟蹤仿真時,仿真結果表明了LF?FOA算法比擾動觀察法更優越,同時光照變化時,本文算法也能快速、準確地找到最大功率點。
注:本文通訊作者為李田澤。
參考文獻
[1] ZHANG H, JI H, REN J, et al. Research on MPPT control and implementation method for photovoltaic generation syst?em and its simulation [C]// 2009 IEEE 6th International Power Electronics. [S.l.]: ?IEEE, 2009: 2108?2112.
[2] 于子捷,魏晨曦,田芳芳,等.一種改進型擾動觀察法在最大功率點跟蹤中的應用[J].電測與儀表,2017,54(15):113?119.
YU Zijie, WEI Chenxi, TIAN Fangfang, et al. An improved perturbation and observation method used in maximum power point tracking control of PV generation system [J]. Electrical measurement & instrumentation, 2017, 54(15): 113?119.
[3] 李星碩,文輝清.基于β參數的變步長MPPT控制研究[J].電力系統保護與控制,2016,44(17):58?63.
LI Xingshuo, WEN Huiqing. Research on an improved β?based variable step MPPT algorithm [J]. Power system protection and control, 2016, 44(17): 58?63.
[4] 劉文濤,張容暢,董雨欣,等.一種新型算法在光伏最大功率跟蹤中應用[J].電測與儀表,2018,55(1):72?77.
LIU Wentao, ZHANG Rongchang, DONG Yuxin, et al. Application of a new algorithm in photovoltaic maximum powertracking [J]. Electrical measurement&instrumentation, 2018, 55(1): 72?77.
[5] ERDEM Z. An advanced particle swarm optimization algorithm for MPPTs inPV systems [J]. Acta physica polonica, 2017, 132(3?II): 1134?1139.
[6] ISHAQUE K, SALAM Z, AMJAD M, et al. An improved particle swarm optimization (PSO) based MPPT for PV with reduced steady?state oscillation [J]. IEEE transactions on power electronics, 2012, 27(8): 3627?3638.
[7] 王林,呂盛祥,曾宇容.果蠅優化算法研究綜述[J].控制決策,2017,32(7):1153?1162.
WANG Lin, L? Shengxiang, ZENG Yurong. Literature survey of fruit fly optimization algorithm [J]. Control and decision, 2017, 32(7): 1153?1162.
[8] PAN Q K, SANG H Y, DUAN J H, et al. An improved fruit fly optimization algorithm for continuous function optimization problems [J]. Knowledge?based systems, 2014, 62(5): 69?83.
[9] WOLF P, BENDA V. Identification of PV solar cells and modules parameters by combining statistical and analytical methods [J]. Solar energy, 2013, 93(7): 151?157.
[10] WU L, CAO G. Seasonal SVR with FOA algorithm for single?step and multi?step ahead forecasting in monthly inbound tourist flow [J]. Knowledge?based systems, 2016, 110: 157?166.
[11] YAN B, ZHAO Z, ZHOU Y, et al. A particle swarm optimization algorithm with rand? om learning mechanism and Levy flight for optimization of atomic clusters [J]. Computer physics communications, 2007, 219: 334?343.
