紅外導引智能航行控制系統設計與實現
2019-11-12 11:38:42溫景松仲偉波馮友兵姚旭洋
現代電子技術 2019年20期
溫景松 仲偉波 馮友兵 姚旭洋
摘 ?要: 采用模塊化設計方案設計并實現了一種基于紅外信號導引的智能航行控制系統。該系統主要由紅外導引信號采集模塊、船模運動控制模塊及驅動模塊組成。采用雙向比較分析方法處理接收到的紅外導引信號,快速判定紅外導引信號的方向。采用PID控制策略,通過調節脈寬調制信號的占空比控制船模的航速和航向。實船測試結果表明,雙向比較分析法能夠快速準確地判定紅外導引信號方位,船模運動控制穩定可靠,高航速下也有較好的導引方向判定和航行控制效果。
關鍵詞: 智能航行; 紅外導引; 模塊化設計; 雙向比較分析; 信號處理; 航向判定; 實船測試
中圖分類號: TN219?34; TP273 ? ? ? ? ? ? ? ? ? ?文獻標識碼: A ? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2019)20?0112?04
Design and implementation of intelligent navigation control system
guided by infrared signal
WEN Jingsong, ZHONG Weibo, FENG Youbing, YAO Xuyang
(School of Electronics and Information Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
Abstract: An intelligent navigation control system based on infrared signal guidance is designed and implemented by means of modular design scheme. The system is composed of infrared guidance signal acquisition module, ship model motion control module and driver module. The received infrared guidance signal is processed by means of bidirectional comparative analysis method to quickly judge the azimuth of the infrared guidance signal. The PID control strategy is adopted to control the speed and course of ship model by adjusting the duty ratio of pulse width modulation signal. The actual ship test results show that the bidirectional comparative analysis method can quickly and accurately judge the azimuth of infrared guidance signal, make the ship model motion control stable and reliable, and has better guidance direction judgment and navigation control effect at high speed.
Keywords: intelligent navigation; infrared guidance; modular design; bidirectional comparative analysis; signal processing; course judgment; actual ship test
0 ?引 ?言
全國海洋航行器設計與制作大賽是我國船舶與海洋工程領域內最為重要的競賽之一,其中船模智能航行比賽集船模設計和控制為一體,是大賽的比賽項目之一。船模智能航行比賽中船模自動捕獲并跟蹤紅外導引信號,按照比賽系統給定的路線依次通過導引門,航線上共設10個引導門,引導門寬1.0 m,高0.4 m,每個引導門最大間距為20 m,賽道總長不超過150 m。引導門上有紅外導引信號,波長940 nm,發射軸線與水面平行。比賽船模需在10 min內按照規定線路完成比賽則成績有效,用時少者勝[1]。
根據全國海洋航行器設計與制作大賽船模智能航行的比賽規則,本文設計并實現了一種船模智能航行控制方案:船模采用單槳單舵運動控制方式,根據紅外引導信號的特點,設計了紅外引導信號獲取方案和濾波處理方法,能夠準確捕捉到導引門系統發出的紅外引導信號,采用PID控制方法對船模的運動進行控制。所設計的紅外信號導引智能航行控制方案已被多個船模采用,并在多次全國海洋航行器設計與制作大賽中獲得優異成績。
根據全國海洋航行器設計與制作大賽船模智能航行的比賽規則及其對動力的要求,選用單體單槳單舵的船體結構和運動控制模式,這種結構具有阻力小、航速快、航向調節靈活、反應速度快等優點。通過對成品船模加裝紅外引導信號采集盤和航行控制系統實現智能航行功能。其中紅外引導信號采集盤高度要適中,既要保證能采集到紅外導引信號,還要保持船體的重心盡量靠下,防止船模在高速轉彎時發生側翻。
1 ?系統硬件設計
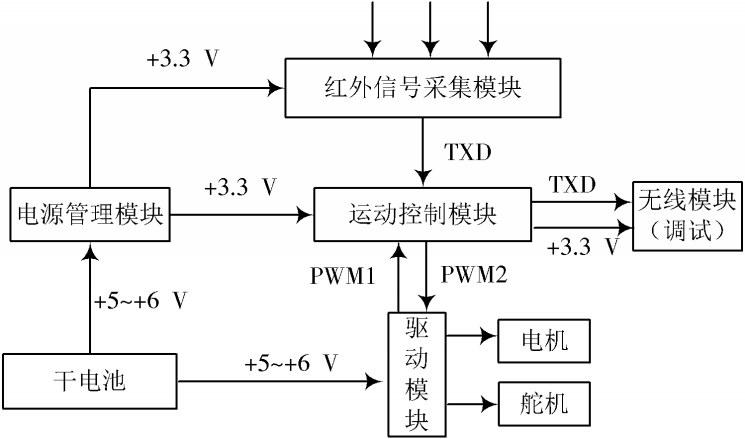
系統硬件是船模智能航行的基礎,包括紅外導引信號采集處理模塊、運動控制模塊和驅動模塊,整個系統的架構如圖1所示。
圖1 ?智能船模控制系統架構圖
根據船模智能航行的比賽規則,整個系統只能使用4節5號干電池。為了提高船模速度,需采用大功率驅動電機,但大功率驅動電機啟動和運行時會導致電源輸出穩定性差,從而影響整個系統的穩定性。為此采用超級電容來提升系統的電源穩定性和可靠性,選用4個100 F/2.7 V超級電容兩兩串聯后并聯作為紅外導引檢測和控制系統的電源,4節5號干電池通過單向二極管給電容充電,在大功率電機驅動運行時也可以保證系統的電源穩定和可靠。
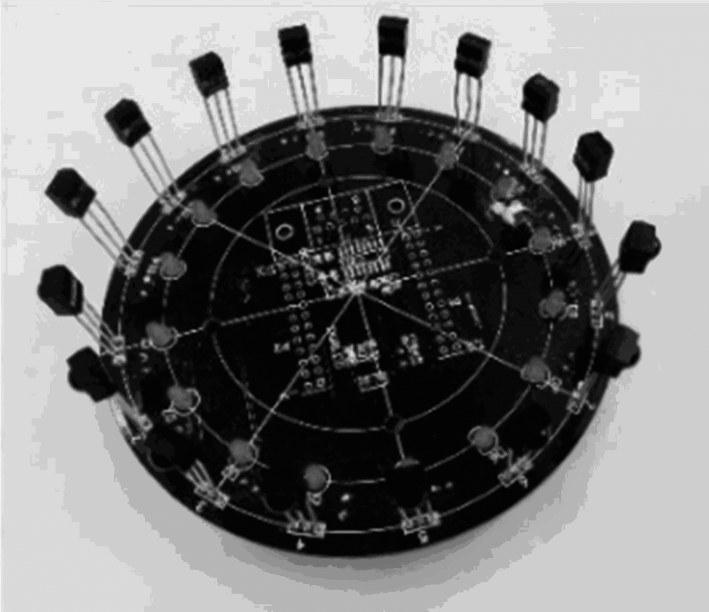
根據船模智能航行比賽的引導信號特點,采用TSOP34838紅外一體化接收管作為紅外信號檢測傳感器,如圖2所示。將紅外引導信號接收模塊設計成圓盤形,圓盤邊緣均勻布置16個紅外信號檢測傳感器,外加黑色屏蔽罩減少噪聲及相鄰方向紅外信號干擾。為了方便調試與檢測,當接收管接收到紅外信號對應指示燈亮。紅外引導信號檢測電路實時將檢測結果交由STC15W單片機進行處理,然后按設定頻率向運動控制模塊發送紅外引導信號方向數據,運動控制模塊據此進行控制。
圖2 ?紅外導引信號檢測模塊
控制模塊主控芯片為STC15W系列芯片,該芯片接口多、集成度高、工作電壓范圍寬。采用單片機自帶的兩路PWM端口分別控制直流電機和舵機,取代使用定時器產生PWM信號的方法,有效節省了CPU資源[2]。驅動模塊對運動控制模塊輸出的兩路PWM信號進行處理,控制直流電機轉速和舵機的轉動角度,達到對船模航速和航向的控制。驅動模塊PWM信號輸入端先采用光耦進行隔離,經過NMOSFET管放大輸出。上述方案可以有效減少電機工作電路部分對控制電路的影響,從而提高整個系統的穩定性和可靠性[3?4]。
2 ?控制系統軟件設計
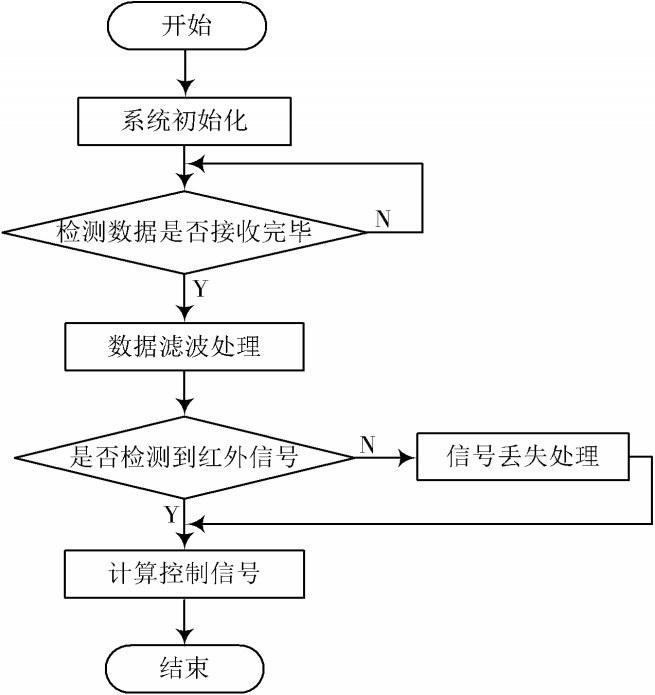
軟件部分主要包括紅外引導信號檢測和數據處理,從而獲取準確的引導信號方向,船模運動控制系統根據引導信號方向和當前的航速與航向,采用PID控制方法計算船模槳舵控制電機的工作參數,并由控制芯片產生對應的控制信號輸出至驅動電路驅動電機,從而實現船模的運動控制[5?7]。系統軟件流程圖如圖3所示。
根據規則,船模智能航行比賽中的紅外引導信號符合NEC協議,即包括9 ms的高電平、4.5 ms的低電平、4個字節地址碼和命令碼。由此可知紅外引導信號發射周期約為66 ms,并且一個周期內紅外傳感器可以接收到有效信號的時間約為27 ms,約占整個編碼信號周期的40%。為此,系統每隔33 μs檢測一次紅外信號,如果端口檢測到紅外信號對此端口計數值加1,采集200次統計檢測到紅外信號的有效次數,若紅外信號有效次數大于60次,則認為該方向有紅外引導信號存在。
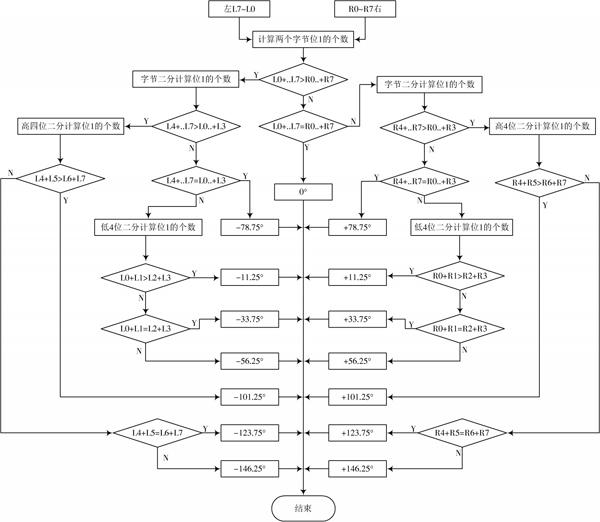
實際中紅外引導信號采集盤會收到來自不同方向的紅外信號,需要通過處理來確定紅外引導信號的方向。本文采用雙向比較分析方法進行信號處理,具體方法如下:
首先對接收到的信號進行預處理,把采集盤正后方傳感器的信號丟掉,余下的15個信號提取出來分別存入2個字節中,正前方信號作為2個字節的公用位分別存入字節1和字節2中的L0和R0位,每一位分別代表對應紅外接收傳感器信號端的狀態,狀態1代表接收到紅外信號,狀態0代表無紅外信號。高位代表最左邊信號和最右邊信號,具體處理流程如圖4所示。
通過雙向比較分析方法可以快速判斷信號發射源的準確方位,負度數代表左偏方位,正度數代表右偏方位。
圖3 ?控制系統軟件流程圖
船模航行過程中由于紅外引導信號漏檢,或者船模駛入信號盲區等原因造成短暫信號丟失,此時系統先保持船模直行,打開定時器監測信號丟失時間,當信號丟失時間超過設定時間,系統啟動信號丟失處理策略,即船模立即降速并緩慢轉彎并搜尋紅外引導信號。
船模在水中的運動規律比較復雜,很難用一個精確的數學模型描述。PID控制是一種簡單、控制參數物理意義明確、基于誤差消除誤差策略的控制算法,不依賴被控對象的數學模型也能夠得到較好的控制效果,被廣泛應用于系統閉環控制。本文采用PID控制方法對船模航向進行控制,船頭方向和紅外信號發射源的方向夾角作為PID控制器的偏差E輸入,R(t)為0°,即船頭方向正對紅外發射源,控制器的輸出為PWM脈寬,通過驅動模塊控制舵機的偏轉角度。航速主要根據船模的航向設定,船模航向角越大速度越小,當船模正對紅外引導信號方向時速度達到最大[8?9]。
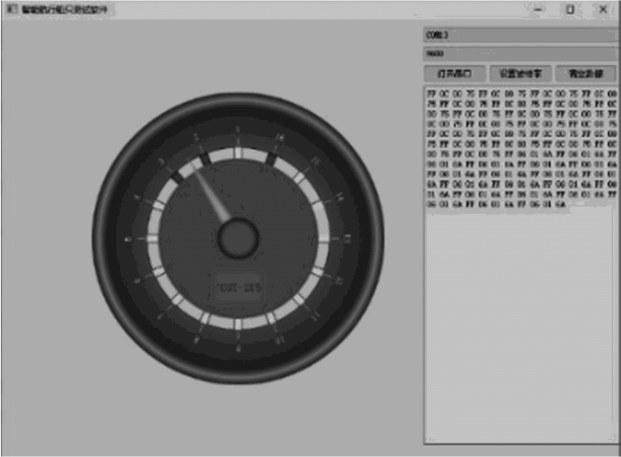
為了方便智能船模的調試,采用基于NRF24L01的短距離無線數據通信模塊,在船模航行過程中通過上位機監測船模對紅外信號的檢測和濾波處理情況,為船模參數的調試提供參考[10]。圖5為船模航行過程中某一時刻信號的采集和濾波處理情況,綠色指針代表濾波處理后輸出的方位角。船模改造完成后先進行了各模塊的功能測試,功能測試通過后又在船模智能航行比賽系統中進行了整體測試。測試結果表明,本文給出的設計結果滿足船模智能航行比賽要求。
圖5 ?上位機紅外信號監測
3 ?結 ?語
根據全國海洋航行器設計制作大賽艦船智能航行比賽規則,從船模控制系統的可靠性、穩定性、精確性出發研制了一套軟硬件結合基于紅外引導的智能航行船模。智能航行船模的關鍵是紅外引導信號的采集與處理,系統采用雙向比較分析方法有效確保紅外信號方位判斷的正確性。通過上位機在線監測控制系統變量信息,經過多次試驗對PID參數進行整定,獲得了較好的航向航速協同控制效果。基于上述設計方案完成的船模參加了多屆全國海洋航行器設計與制作大賽智能航行比賽,獲得優秀成績,證明了本文給出的設計方案穩定可靠。
參考文獻
[1] 中國造船工程學會.第七屆全國海洋航行器設計與制作大賽評分細則[EB/OL].[2017?04?28].http://www.csname.org.cn/qghyhxqds/323955.htm.
Chinese Society of Naval Architecture and Marine Engineering. The seventh national ocean navigator design and production competition rules [EB/OL]. [2017?04?28]. http://www.csname.org.cn/qghyhxqds/323955.htm.
[2] 高正中,趙晨暉,宋森森.基于STC15 MCU的微型四軸飛行器設計[J].現代電子技術,2016,39(24):145?148.
GAO Zhengzhong, ZHAO Chenhui, SONG Sensen. Design of micro four?axis vehicle based on STC15 MCU [J]. Modern electronics technique, 2016, 39(24): 145?148.
[3] 胡發煥,邱小童,蔡咸健.基于場效應管的大功率直流電機驅動電路設計[J].電機與控制應用,2011,38(4):21?24.
HU Fahuan, QIU Xiaotong, CAI Xianjian. Design of high?power driver for DC motor base on MOSFET [J]. Motor and control applications, 2011, 38 (4): 21?24.
[4] 陳柯,李媛媛,方璇.單片機驅動電機的設計與實現[J].實驗室研究與探索,2016,35(3):119?122.
CHEN Ke, LI Yuanyuan, FANG Xuan. Design and implementation of driving motor based on MCU [J]. Laboratory research and exploration, 2016, 35(3): 119?122.
[5] 劉海旗,何軍紅.基于AVR單片機的紅外導航無人船的設計與實現[J].工業儀表與自動化裝置,2015(4):47?50.
LIU Haiqi, HE Junhong. Design and implementation of infrared navigation unmanned ship based on AVR [J]. Industrial instrument and automation device, 2015(4): 47?50.
[6] 朱春華,顧雪亮.基于紅外反射式傳感器TCRT5000的循跡小車設計[J].現代電子技術,2018,41(18):143?146.
ZHU Chunhua, GU Xueliang. Track car design based on infrared reflective sensor TCRT5000 [J]. Modern electronics technique, 2018, 41(18): 143?146.
[7] 史曉娟,李松博.基于AVR單片機的嵌入式可編程控制系統[J].儀表技術與傳感器,2017(6):54?58.
SHI Xiaojuan, LI Songbo. Embedded programmable control system based on AVR MCU [J]. Instrument technology and sensors, 2017(6): 54?58.
[8] 馬婭婕,彭攀來,劉國慶,等.基于梯度下降法和雙環PID的四旋翼飛行器的研究與設計[J].現代電子技術,2017,40(18):11?14.
MA Yajie, PENG Panlai, LIU Guoqing, et al. Research and design of Four?rotor aircraft based on gradient descent method and double?loop PID [J]. Modern electronics technique, 2017, 40(18): 11?14.
[9] 王祎晨.增量式PID和位置式PID算法的整定比較與研究[J].工業控制計算機,2018,31(5):123?124.
WANG Yichen. Comparison and research on setting of incremental and positional PID algorithms [J]. Industrial control computer, 2018, 31(5): 123?124.
[10] 胡鄧華,馮剛,孫際哲.基于STC單片機的數字采控電路設計[J].現代電子技術,2018,41(8):53?56.
HU Denghua, FENG Gang, SUN Jizhe. Design of digital acquisition and control circuit based on STC single chip computer [J]. Modern electronics technique, 2018, 41(8): 53?56.
