低空攝影測量飛機(jī)慣導(dǎo)姿態(tài)精度評(píng)估技術(shù)
2019-11-15 07:10:40胡丙華張虎龍張杰
中國測試 2019年5期
胡丙華 張虎龍 張杰


摘要:針對(duì)試飛試驗(yàn)中飛機(jī)慣導(dǎo)系統(tǒng)的姿態(tài)數(shù)據(jù)精度評(píng)估問題,從航空攝影測量控制定位理論出發(fā),基于POS輔助空中三角測量和光束法區(qū)域網(wǎng)平差理論與方法,充分利用各種傳感器特性和地面控制條件,實(shí)現(xiàn)攝影瞬間飛機(jī)慣導(dǎo)系統(tǒng)姿態(tài)參數(shù)的高精度測量,并與飛機(jī)慣導(dǎo)系統(tǒng)實(shí)際獲取的姿態(tài)數(shù)據(jù)進(jìn)行殘差計(jì)算和精度對(duì)比分析,進(jìn)而實(shí)現(xiàn)對(duì)飛機(jī)慣導(dǎo)系統(tǒng)姿態(tài)數(shù)據(jù)精度的評(píng)估。飛行試驗(yàn)證明:利用低空攝影測量的密集控制網(wǎng)光束法區(qū)域平差方法,能夠獲取精度高于慣導(dǎo)數(shù)據(jù)一個(gè)等級(jí)以上的姿態(tài)數(shù)據(jù),可充分實(shí)現(xiàn)對(duì)慣導(dǎo)數(shù)據(jù)精度的合理評(píng)估。
關(guān)鍵詞:試飛試驗(yàn);慣導(dǎo)系統(tǒng);姿態(tài)精度評(píng)估;POS輔助空中三角測量;光束法區(qū)域網(wǎng)平差
中圖分類號(hào):V217.31 文獻(xiàn)標(biāo)志碼:A 文章編號(hào):1674-5124(2019)05-0145-06
收稿日期:2018-05-21;收到修改稿日期:2018-09-14
作者簡介:胡丙華(1986-),女,湖北赤壁市人,高級(jí)工程師,碩士,主要從事攝影測量研究與應(yīng)用以及光電測試工作。
0 引言
慣性導(dǎo)航系統(tǒng)(inertial navigation system,INS)是一種不依賴于任何外部信息,也不向外部輻射能量的完全自主式導(dǎo)航系統(tǒng),具有隱蔽性好,提供的導(dǎo)航參數(shù)多,抗干擾性強(qiáng)和適用條件寬等優(yōu)點(diǎn),因此成為航天、航空和航海等領(lǐng)域中一種廣泛使用的主要導(dǎo)航系統(tǒng)[1]。
新型慣性導(dǎo)航系統(tǒng)要在真實(shí)飛行環(huán)境中才能完成其設(shè)計(jì)定型/鑒定,進(jìn)而投入使用。在對(duì)INS的位置、姿態(tài)角精度的設(shè)計(jì)定型/鑒定試飛中,曾采用簡化過的航空攝影測量方法進(jìn)行INS位置精度的鑒定,還采用過航空攝影測量中的解析空中三角測量的方法進(jìn)行慣性導(dǎo)航系統(tǒng)位置、速度和姿態(tài)角精度的鑒定,由于解析空中三角測量方法的環(huán)節(jié)多、技術(shù)復(fù)雜、工作量大、周期長,特別是要檢校出平臺(tái)式慣導(dǎo)系統(tǒng)的物理平臺(tái)與攝影影像平面的姿態(tài)角誤差的技術(shù)難度也很大。同時(shí)隨著INS姿態(tài)角測量精度的提高,該法又難于滿足其姿態(tài)角精度鑒定的要求,因此在后來的INS鑒定的試飛中,采用高精度的INS進(jìn)行對(duì)比試飛[2]。隨著全球衛(wèi)星定位技術(shù)的出現(xiàn)和發(fā)展,國產(chǎn)INS技術(shù)的提高,此時(shí)采用國外進(jìn)口的INS進(jìn)行對(duì)比試飛已不能滿足其精度鑒定的要求。目前,INS姿態(tài)角測量精度的考核評(píng)估則是以地面轉(zhuǎn)臺(tái)試驗(yàn)為主,即采用高精度的地面轉(zhuǎn)臺(tái)來評(píng)估其姿態(tài)角的精度[3-5]。但是,地面試驗(yàn)畢竟不能替代空中真實(shí)飛行條件下的飛行試驗(yàn)鑒定,因此本文提出一種新的試飛鑒定方法——基于低空攝影測量的飛機(jī)慣導(dǎo)姿態(tài)精度評(píng)估。該方法通過航攝系統(tǒng)對(duì)某測區(qū)進(jìn)行拍攝,獲取地面控制場數(shù)據(jù)、POS數(shù)據(jù)和航攝影像數(shù)據(jù),經(jīng)數(shù)據(jù)預(yù)處理、影像自動(dòng)匹配、自由網(wǎng)平差、光束法區(qū)域網(wǎng)平差、慣導(dǎo)數(shù)據(jù)精度分析等處理,實(shí)現(xiàn)飛機(jī)慣導(dǎo)系統(tǒng)姿態(tài)數(shù)據(jù)的動(dòng)態(tài)精度評(píng)估。
1 飛機(jī)慣導(dǎo)系統(tǒng)姿態(tài)評(píng)估方法
基于低空攝影測量的飛機(jī)慣導(dǎo)姿態(tài)精度評(píng)估方法是在飛行平臺(tái)上集成高分辨率航測相機(jī)、POS系統(tǒng)、被試慣導(dǎo)系統(tǒng)等設(shè)備,并在飛行過程中實(shí)施對(duì)地?cái)z影,利用航空攝影測量領(lǐng)域的相關(guān)理論與方法,精確求解出攝影瞬間飛機(jī)的姿態(tài)航向參數(shù),通過與飛機(jī)慣導(dǎo)系統(tǒng)實(shí)際獲取的姿態(tài)數(shù)據(jù)進(jìn)行系統(tǒng)分析和比較,科學(xué)地評(píng)測出民用飛機(jī)慣導(dǎo)系統(tǒng)所輸出姿態(tài)航向數(shù)據(jù)的實(shí)際精度,進(jìn)而實(shí)現(xiàn)慣導(dǎo)系統(tǒng)的精度評(píng)估。技術(shù)路線如圖1所示。其中,為減少評(píng)估飛行試驗(yàn)的經(jīng)費(fèi)需求,采用地面控制場密集布設(shè)與航線高重疊度的設(shè)計(jì),結(jié)合附加參數(shù)的自檢校光束法區(qū)域網(wǎng)平差技術(shù),實(shí)現(xiàn)POS系統(tǒng)輔助的空中三角測量[6]與系統(tǒng)檢校工作的同步開展。該方法的核心是POS輔助的航空影像區(qū)域網(wǎng)構(gòu)建、POS輔助的光束法區(qū)域網(wǎng)平差和慣導(dǎo)系統(tǒng)姿態(tài)精度評(píng)估。
1.1 POS輔助的航空影像區(qū)域網(wǎng)構(gòu)建
POS輔助的航空影像區(qū)域網(wǎng)構(gòu)建是將GPS/IMU的觀測數(shù)據(jù)進(jìn)行嚴(yán)格的聯(lián)合數(shù)據(jù)后處理(動(dòng)態(tài)卡爾曼濾波),將其作為航攝相機(jī)的空間位置和姿態(tài),以輔助多影像匹配,實(shí)現(xiàn)特征點(diǎn)的自動(dòng)量測和自動(dòng)轉(zhuǎn)點(diǎn);利用該數(shù)據(jù)能有效提高影像匹配的效率、準(zhǔn)確性和可靠性。其實(shí)現(xiàn)流程如圖2所示。
1)GPS/IMU數(shù)據(jù)預(yù)處理
GPS的基本定位原理是衛(wèi)星不間斷地發(fā)送自身的星歷參數(shù)和時(shí)間信息,用戶接收到這些信息后,經(jīng)過差分計(jì)算求出接收機(jī)的三維位置、三維方向、運(yùn)動(dòng)速度和時(shí)間信息。INS姿態(tài)測量主要是利用慣性測量單元(IMU)來感測飛機(jī)或其他載體的加速度,經(jīng)過積分等運(yùn)算,獲取載體的速度和姿態(tài)(如位置及旋轉(zhuǎn)角度)等信息。
GPS/IMU數(shù)據(jù)預(yù)處理主要是將原始GPS、IMU數(shù)據(jù)轉(zhuǎn)換為以航攝相機(jī)透視中心為原點(diǎn)的空間坐標(biāo)系下的位置和姿態(tài)數(shù)據(jù)。預(yù)處理結(jié)果作為GPS/IMU觀測值。
2)影像預(yù)處理
影像預(yù)處理主要是利用內(nèi)定向參數(shù)對(duì)影像進(jìn)行預(yù)處理,即先消除影像的像主點(diǎn)偏移、畸變差,將影像糾正為無畸變的標(biāo)準(zhǔn)影像;然后將彩色影像轉(zhuǎn)為灰度影像,并進(jìn)行影像增強(qiáng)。
3)特征提取和影像匹配
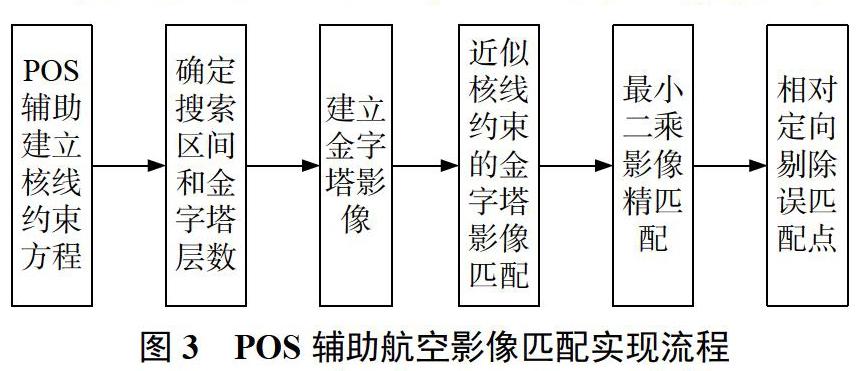
首先采用Harris算子[7]提取出特征點(diǎn),然后在GPS/IMU導(dǎo)航數(shù)據(jù)的約束下,采用最小二乘匹配方法實(shí)現(xiàn)子像素級(jí)別的影像匹配。采用POS輔助影像匹配方法[8-9]自動(dòng)量測像點(diǎn),可以大幅提高自動(dòng)轉(zhuǎn)點(diǎn)中的匹配率和匹配效率,改善某些影像旋角過大、影像紋理不明顯、地形起伏較大等難以匹配的影像必須通過手工加點(diǎn)實(shí)現(xiàn)轉(zhuǎn)點(diǎn),進(jìn)而實(shí)現(xiàn)交互量測的難題。同時(shí)在匹配過程中引入基于數(shù)據(jù)探測的粗差分析技術(shù),進(jìn)行粗差觀測值的自動(dòng)探測和剔除,保證大范圍區(qū)域影像間精確關(guān)系的穩(wěn)定構(gòu)建。其中POS輔助航空影像匹配方法的實(shí)現(xiàn)路線女口圖3所示。
4)自由網(wǎng)平差
自由網(wǎng)平差是利用影像自動(dòng)匹配獲取的連接點(diǎn)進(jìn)行相對(duì)定向,實(shí)現(xiàn)攝影區(qū)域自由網(wǎng)的構(gòu)建[10]。相對(duì)定向結(jié)果精度需達(dá)到一個(gè)像素以內(nèi),以確保影像間連接強(qiáng)度比較穩(wěn)定,自由網(wǎng)構(gòu)建結(jié)果良好。
1.2 POS輔助的光束法區(qū)域網(wǎng)平差
光束法區(qū)域網(wǎng)平差是以一幅影像所組成的一束光線作為平差計(jì)算的基本單元,以中心投影的共線方程作為平差的基礎(chǔ)方程[11]。通過各個(gè)光線束在空間的旋轉(zhuǎn)和平移,使模型之間的公共點(diǎn)(亦稱連接點(diǎn))的光線實(shí)現(xiàn)最佳的交會(huì),并使整個(gè)區(qū)域最佳地納入到已知點(diǎn)的坐標(biāo)系統(tǒng)中。在具有多余觀測的情況下,由于存在像點(diǎn)坐標(biāo)的量測誤差,要使得相鄰影像公共點(diǎn)的坐標(biāo)相等和控制點(diǎn)的加密坐標(biāo)與地面測量的控制點(diǎn)坐標(biāo)一致,這就需要采用最小二乘光線束法平差計(jì)算,使獲得的光線束(影像平面)的外方位角元素和線元素達(dá)到最好的精度。具體實(shí)現(xiàn)流程如圖4所示。
1)光束法區(qū)域網(wǎng)平差的基本原理
光束法區(qū)域網(wǎng)平差的核心是共線條件方程:
式中:(x,y)、(x0,y0)像點(diǎn)和像主點(diǎn)在影像坐標(biāo)系下的坐標(biāo);
fx、fy——x,y兩個(gè)方向的焦距;
P(X,Y,Z)——地面點(diǎn)坐標(biāo);
(XS,YS,ZS)——影像的外方位線元素;
ai、bi、ci(i=1,2,3)——影像的外方位角元素φ、ω、κ所確定的旋轉(zhuǎn)矩陣中的各元素;
(△x,△y)——系統(tǒng)誤差改正數(shù);
(X,Y,Z)——中間變量。
2)慣導(dǎo)系統(tǒng)誤差改正模型
設(shè)機(jī)載GPS接收機(jī)天線相位中心A在地面坐標(biāo)系M-XYZ中的坐標(biāo)為(XA,YA,ZA),若A點(diǎn)在空間輔助坐標(biāo)系S-uvw中的坐標(biāo)為(u,v,w),則利用像片姿態(tài)角φ、ω、κ所構(gòu)成的正交變換矩陣R,可得GPS系統(tǒng)誤差改正模型公式+;如下:
式中:aX、aY、aZ、bX、bY、bZ——GPS攝站漂移系統(tǒng)誤差改正參數(shù);
t0——參考時(shí)刻,其余參數(shù)意義同上。
IMU數(shù)據(jù)與矩陣R滿足以下等量關(guān)系:
式中:RIG(φ',ω',κ')——IMU坐標(biāo)系到物方空間坐標(biāo)系的變換矩陣;
RPI(△φ',△ω',△κ')——像空間坐標(biāo)系到IMU坐標(biāo)系之間的變換矩陣;
φ'、ω'、κ'——IMU獲取的姿態(tài)參數(shù);
△φ'、△ω'、△κ'——IMU坐標(biāo)系與像空間輔助坐標(biāo)系之間的誤差[11-12]。
其中,aφ、aω、aκ、bφ、bω、bκ為IMU系統(tǒng)誤差改正參數(shù),其余參數(shù)意義同上。
3)帶附加系統(tǒng)誤差參數(shù)的誤差方程構(gòu)建
以像點(diǎn)坐標(biāo)、GPS攝站坐標(biāo)和IMU姿態(tài)角為觀測值,視物點(diǎn)地面坐標(biāo)、影像外方位元素以及各種系統(tǒng)誤差改正參數(shù)為待定參數(shù),依據(jù)共線條件方程和POS系統(tǒng)誤差改正模型,構(gòu)建POS輔助光束法區(qū)域網(wǎng)平差的誤差方程。依照像點(diǎn)坐標(biāo)、GPS攝站坐標(biāo)和IMU姿態(tài)角的測量精度,分別給予3類觀測值不同的權(quán),用最小二乘平差方法求解物點(diǎn)的三維地面坐標(biāo)和影像外方位元素的最或是值。由于誤差方程中考慮了POS系統(tǒng)觀測值的累積誤差,引入了適當(dāng)?shù)南到y(tǒng)誤差補(bǔ)償模型,可在平差過程中同時(shí)解求系統(tǒng)誤差改正參數(shù)。當(dāng)平差迭代收斂時(shí),就能自檢校并自消除POS系統(tǒng)定位測姿所產(chǎn)生的位置平移和隨時(shí)間的線性漂移誤差,提高了影像外方位元素的測定精度。
4)病態(tài)方程求解
當(dāng)矩陣的條件數(shù)很大時(shí),其性態(tài)通常較差,直接求逆經(jīng)常會(huì)出現(xiàn)數(shù)值不穩(wěn)定。在很多情況下可以將病態(tài)矩陣的求逆問題轉(zhuǎn)化為求解多個(gè)相應(yīng)的病態(tài)代數(shù)方程問題。矩陣奇異值分解(singular valuedecomposition,SVD)算法可以有效地解決量測方程的病態(tài)問題[13]。雙邊JACOBI算法[14-15]作為廣泛應(yīng)用的奇異值分解算法,可用于上述帶附加系統(tǒng)參數(shù)的誤差方程求解。
5)粗差探測與定位
選權(quán)迭代粗差檢驗(yàn)的基本思想仍從慣用的最小二乘法開始,但在每次平差以后,根據(jù)其殘差和其他有關(guān)參數(shù),按所選擇的權(quán)函數(shù)計(jì)算每個(gè)觀測值在下步迭代計(jì)算中的權(quán)值。如果權(quán)函數(shù)選擇得當(dāng),且粗差可定位時(shí),則含粗差的觀測值的權(quán)將愈來愈小。迭代中止時(shí),相應(yīng)的殘差將直接指出粗差的數(shù)值,而平差結(jié)果將不再受粗差的影響。這樣,便實(shí)現(xiàn)了粗差的自動(dòng)定位和改正。根據(jù)參與平差的數(shù)據(jù)特點(diǎn),選擇合適的權(quán)函數(shù),經(jīng)試驗(yàn)驗(yàn)證,采用基于改進(jìn)丹麥法的選權(quán)迭代[16],能夠很好地完成粗差探測與定位,以及剔除處理。
1.3 慣導(dǎo)姿態(tài)精度評(píng)估
經(jīng)區(qū)域網(wǎng)整體平差后,根據(jù)控制點(diǎn)殘差統(tǒng)計(jì),計(jì)算獲得未知數(shù)單位權(quán)中誤差,進(jìn)而根據(jù)協(xié)方差陣計(jì)算各未知數(shù)中誤差。當(dāng)各未知數(shù)中誤差遠(yuǎn)小于慣導(dǎo)系統(tǒng)姿態(tài)精度時(shí),可將區(qū)域網(wǎng)平差獲得的姿態(tài)數(shù)據(jù)進(jìn)行安裝偏差量修正后作為真值,與慣導(dǎo)系統(tǒng)導(dǎo)航數(shù)據(jù)進(jìn)行對(duì)比分析,根據(jù)兩種方式獲得的姿態(tài)數(shù)據(jù)較差分布情況,剔除異常值,再采用均方根誤差評(píng)價(jià)慣導(dǎo)系統(tǒng)姿態(tài)精度;當(dāng)各未知數(shù)中誤差大于慣導(dǎo)系統(tǒng)姿態(tài)精度的1/3時(shí),無法進(jìn)行慣導(dǎo)系統(tǒng)姿態(tài)精度的可靠性評(píng)估,需要對(duì)試驗(yàn)設(shè)計(jì)、試驗(yàn)實(shí)驗(yàn)與數(shù)據(jù)處理等環(huán)節(jié)進(jìn)行檢查和重新規(guī)劃設(shè)計(jì),以實(shí)現(xiàn)高精度的空中三角測量處理。
2 試驗(yàn)驗(yàn)證
對(duì)西安地區(qū)1:1000的404張地面分辨率為0.059701m的UCXP影像進(jìn)行了空中三角測量處理,影像像素大小為0.006mm。測區(qū)分為4條南北飛行、4條東西飛行和1條S型飛行,共計(jì)9條航帶。空中三角測量處理過程中將南北飛行4條航線單獨(dú)劃分為測區(qū)一,將東西飛行及S型飛行航線劃分為測區(qū)二。對(duì)兩個(gè)測區(qū)分別進(jìn)行影像處理、自動(dòng)匹配、自由網(wǎng)平差,然后對(duì)兩個(gè)測區(qū)數(shù)據(jù)進(jìn)行區(qū)域網(wǎng)整體平差,平差后根據(jù)誤差方程殘差統(tǒng)計(jì)計(jì)算各未知數(shù)中誤差,如表1所示。
由表1比較得出,平差后角元素精度水平高于慣導(dǎo)數(shù)據(jù)解算精度一個(gè)量級(jí),可以將空中三角測量結(jié)果作為真值,將兩結(jié)果之差視為GPS/IMU組合導(dǎo)航數(shù)據(jù)的誤差。在計(jì)算出所有航帶各曝光時(shí)刻不同姿態(tài)參數(shù)的差值之后,去除明顯的錯(cuò)誤數(shù)據(jù),剩余的姿態(tài)誤差值可認(rèn)為滿足隨機(jī)誤差分布的規(guī)律,用均方根誤差來評(píng)價(jià)其精度。所有航帶各曝光時(shí)刻不同姿態(tài)參數(shù)的誤差和統(tǒng)計(jì)均方根如表2所示。其中Mean是指單航帶姿態(tài)參數(shù)誤差的均值;max和min是指單航帶姿態(tài)參數(shù)誤差的最大值和最小值,有正負(fù)區(qū)別;rmsError是指所有誤差統(tǒng)計(jì)的均方根,無正負(fù)區(qū)分。
由表2可以看出,IMU在每個(gè)航帶內(nèi)姿態(tài)誤差變化較小,從而評(píng)估IMU姿態(tài)數(shù)據(jù)的穩(wěn)定可靠性;同時(shí)可整體評(píng)估得出IMU姿態(tài)角精度為:航向角0.095°,俯仰角0.014°,橫滾角0.016°;與POS系統(tǒng)標(biāo)稱精度:航向0.05°,俯仰與橫滾0.008°相比,飛行試驗(yàn)校準(zhǔn)得出的精度評(píng)估偏低,說明慣導(dǎo)系統(tǒng)經(jīng)過一段時(shí)間的使用,未經(jīng)過系統(tǒng)誤差精確檢校,其實(shí)際精度很難達(dá)到系統(tǒng)標(biāo)稱精度。
3 結(jié)束語
基于低空攝影測量的飛機(jī)慣導(dǎo)姿態(tài)精度評(píng)估技術(shù)是通過航空攝影測量手段獲得更高精度位姿數(shù)據(jù)來進(jìn)行慣導(dǎo)系統(tǒng)姿態(tài)精度的評(píng)估。POS輔助的空三平差系統(tǒng)能對(duì)GPS和IMU數(shù)據(jù)的常量偏移、航帶漂移、線性漂移3個(gè)系統(tǒng)誤差進(jìn)行有效改正。利用1:1000控制網(wǎng)相對(duì)定向-絕對(duì)定向結(jié)果,結(jié)合空三平差系統(tǒng)的精確平差,獲取能夠高于慣導(dǎo)數(shù)據(jù)等級(jí)的外方位元素?cái)?shù)據(jù),達(dá)到檢校INS系統(tǒng)精度的目的。該方法為我國慣導(dǎo)系統(tǒng)飛行試驗(yàn)動(dòng)態(tài)精度鑒定、評(píng)估提供了一種有效技術(shù)手段。
參考文獻(xiàn)
[1]王文明.基于圖像匹配的導(dǎo)航方法研究[D]西安:西北工業(yè)大學(xué),2006.
[2]PAYTSAR M,JENNIFER S H,F(xiàn)EIQIN X,et al.GPS/INSnavigation precision and its effect on airborne radiooccultation retrieval accuracy[J].GPS Solutions,2011,15(3):207-218.
[3]PARAS K,LASKY T A,RAVANI B.Design andimplementation of a mechatronic,all-accelerometer inertialmeasurement unit[J].IEEE/ASME Transactions onMechatronics,2007,12(6):640-650.
[4]張和杰,李京書.基于雙軸轉(zhuǎn)臺(tái)的捷聯(lián)慣導(dǎo)系統(tǒng)姿態(tài)精度評(píng)定算法[J].艦船電子工程,2015,35(4):51-55.
[5]王浩,劉秀娟,齊建宇.捷聯(lián)慣導(dǎo)動(dòng)態(tài)角精度實(shí)時(shí)測試評(píng)定技術(shù)[J].計(jì)算機(jī)工程與應(yīng)用,2017,53(13):266-270.
[6]鄒勇平.POS輔助航空攝影測量應(yīng)用方法研究與誤差分析[D].西安:西安電子科技大學(xué),2010.
[7]張永軍.基于序列圖像的視覺檢測理論與方法[M].武漢:武漢大學(xué)出版社,2008.
[8]SUPANNEE T,IMPYEONG L.Using GPS/INS data toenhance image matching for real-time aerial triangulation[J].Computers&Geosciences,2014,72(11):244-254.
[9]袁修孝,季順平,昊珍麗.POS輔助航空影像匹配方法:200810246336.0[P].2009-06-24.
[10]張劍清,潘勵(lì),王樹根.攝影測量學(xué)[M].武漢:武漢大學(xué)出版社,2003.
[11]楊少文.IMU/DGPS輔助航空攝影新技術(shù)在鐵路勘測中的應(yīng)用[J].鐵道勘察,2011,37(5):25-29.
[12]郭大海,昊立新,王建超,等.機(jī)載POS系統(tǒng)對(duì)地定位方法初探[J].國土資源遙感,2004,16(2):26-31.
[13]盧波.病態(tài)問題的奇異值分解算法與比較[J].測繪信息與工程,2011,36(4):19-22.
[14]HAN Q,ZENG L.FPGA implementation for low-rankchannel estimation of OFDM[J].Journal of Networks,2012,7(10):1631-1638.
[15]MA W,KAYE M E,LUKE D M,et al.An FPGA-basedsingular value decomposition processor[C]//Electrical andComputer Engineering,2006.
[16]王晏民,胡春梅.一種地面激光雷達(dá)點(diǎn)云與紋理影像穩(wěn)健配準(zhǔn)方法[J].測繪學(xué)報(bào),2012,41(2):266-272.
(編輯:商丹丹)
