智能化帶式輸送機系統在煤礦中的應用研究
2019-11-25 03:38:22王建楠李曉華鄭功勛王曉東王春華
中國煤炭 2019年10期
王建楠 李曉華,3 鄭功勛 王曉東 王春華
(1.貴州省煤礦設計研究院有限公司,貴州省貴陽市,550025;2.貴州省礦山安全科學研究院,貴州省貴陽市,550025;3.河南理工大學安全學院,河南省焦作市,454003)
貴州省煤炭儲量豐富,其中大多數煤礦是地下開采方式,主要應用帶式輸送機進行運輸,帶式輸送機已然成為煤礦生產中的大動脈,發揮著重要作用[1]。目前貴州省大多數煤礦的運輸系統采用傳統的現場管理方式,每條帶式輸送機機頭配備1名司機和1名巡檢人員,帶式輸送機的啟停很多時候需要監控室調度員通過電話來協調,而且經常不能及時發現膠帶打滑、跑偏、斷裂和撕裂等情況,極大地影響了生產和安全。有人值守的控制方式大大增加了人工成本,并且由于人為因素的不確定性較大,可能會出現啟停帶式輸送機不及時而造成較大的經濟損失和安全事故[2-3]。
為了滿足煤礦企業的需求,我國的煤礦科研工作者利用先進的SCADE組態軟件技術和PLC技術成功的研發了一套智能化帶式輸送機系統。本文將結合已經完成智能化帶式輸送機系統改造的大運煤礦對該系統進行研究分析,為其他同類型的礦山智能化建設提供參照,促進貴州省煤礦機械化和智能化改造。
1 升級改造方案
1.1 現狀分析
本次帶式輸送機系統改造范圍為主平硐帶式輸送機和主斜井帶式輸送機,主平硐選用的帶式輸送機型號為DTL100/50/2×90,采用阻燃膠帶,寬度為1 m,速度為2.5 m/s,長度為705 m;主斜井帶式輸送機選用的帶式輸送機型號為DTL100/50/2×75,采用阻燃膠帶,寬度為1 m,長度為420 m;驅動系統選用2臺YBS-75型電動機,功率為75 kW。
(1)啟停調度現狀。每條帶式輸送機的機頭配備1名固定的司機,專門負責帶式輸送機的啟停,帶式輸送機開啟為順煤流喊話,逆煤流開啟,很多時候需要調度員電話調度。目前的帶式輸送機啟動方式自動化程度較低,且成本和勞動強度較大。
(2)保護系統現狀。煤流運輸沿線保護系統過于簡單,系統無通訊接口,無法融入控制系統中,自動化程度較低,故障發生時無法做到自動處理和及時停車,存在一定的安全隱患。轉載點堵煤等運行故障主要依賴人工檢測,不能在故障發生后立即停車,容易使故障擴大化。
1.2 系統架構
智能化帶式輸送機系統以PLC控制系統為核心,與上位機、防爆PLC控制站、帶式輸送機保護傳感器等組成PLC分布式監控系統[4]。智能化帶式輸送機系統的架構可以分4層,即傳感執行層、控制層、網絡傳輸層和監控信息層,其中以太網傳輸層屬于井下部分,監控信息層屬于地面部分[5]。智能化帶式輸送機系統架構如圖1所示。
(1)傳感執行層。傳感執行層包括帶式輸送機相關數據的采集和命令的執行,其采集和執行功能是通過在帶式輸送機上安裝的相關傳感器(溫度、速度、載荷等8大傳感器)來實現。傳感器實時監測相關數據和帶式輸送機的相關狀態。當出現膠帶跑偏或緊急情況時可以拉下急停開關,急停閉鎖帶式輸送機。
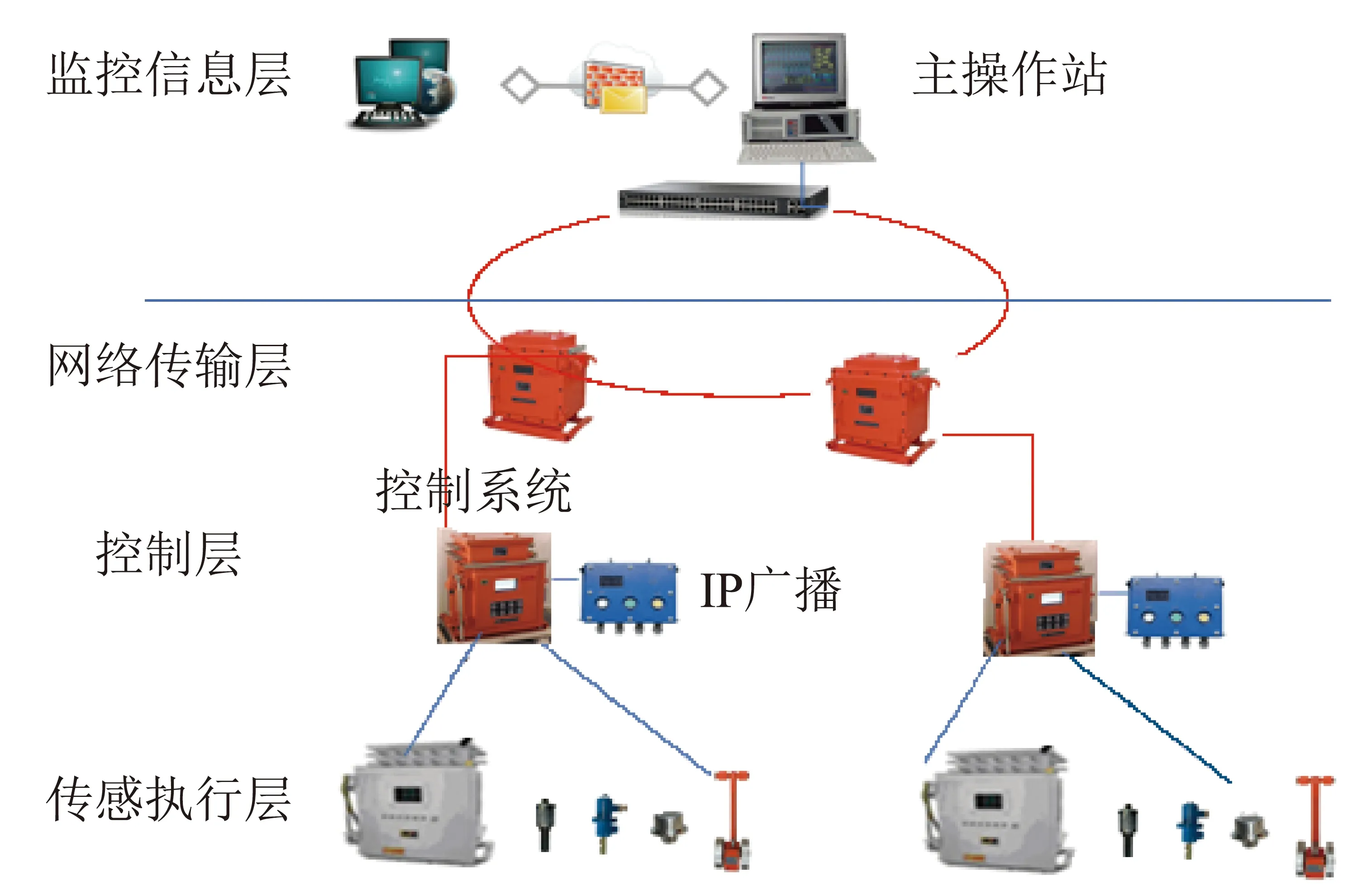
圖1 智能化帶式輸送機系統架構
(2)控制層。該層主要由PLC控制系統組成,實現帶式輸送機的控制、設備運行信息的上傳及控制指令的執行。一般是在帶式輸送機機頭安裝1臺控制箱,來實現接入設備的控制及相關信息的處理,應用先進的PLC編程軟件將程序寫入PLC,實現智能化控制功能,監測帶式輸送機的狀態。
(3)網絡傳輸層。該層指的是工業環網,由井下環網交換機和地面環網交換機等組成,形成一個閉合的環,井下和井上通過環網上傳數據和下發命令。
(4)監控信息層。在集控室實現對帶式輸送機系統設備的實時監測、集中控制和統一調度。
1.3 系統功能
1.3.1 控制功能
(1)遠程控制。調度室操作員在集控室遠程集中控制各帶式輸送機運行。地面調度室將命令經環網下發到井下PLC控制器,自動按預定程序啟動帶式輸送機。
(2)就地自動控制。由井下操作員在控制箱上實現一鍵啟停單設備,此時帶式輸送機與前級存在聯鎖關系。
(3)就地手動控制。該控制方式將保護功能全部甩掉,使其處于離線狀態,便于檢修。
1.3.2 監測保護功能
(1)具有煙霧、堆煤、跑偏、速度(打滑、超速)保護、溫度、沿線急停閉鎖等檢測保護功能以及傳感器數據監測顯示功能。
(2)帶式輸送機沿線需要安裝信號裝置,可實現帶式輸送機啟動報警、打點信號聯絡和語音通訊功能。
(3)地面和井下帶式輸送機機頭可實現語音對講功能。
1.3.3 系統管理功能
為了系統的安全運行,設置了操作系統登錄界面,針對不同職務的人員對其賬號設置不同的權限。
2 工程應用實例
2.1 地面監控系統
大運煤礦地面監控系統由監控主備機、監控軟件及服務器等組成。上位機軟件應用的是目前最先進的SCADA組態軟件[6],該軟件有兩個層面(服務器層面和客戶端層面),服務器體系結構可以進行監測點數據的采集和處理(如單位轉換、報警檢測、計算、事件處理和儲存等),客戶端體系結構通過與服務器之間的通訊功能來獲取數據并用于人機交互,實時監測傳感器的狀態,并可以進行帶式輸送機啟停延時時間等參數的設置;客戶端界面上的高清數字攝像頭可以實時監控井下情況;服務器體系結構可以對運行的數據進行長期的儲存,利用SCADA軟件在上位機上可以對歷史數據曲線和歷史事件進行實時調取[7-8]。智能化帶式輸送機系統部分歷史曲線如圖2所示。
SCADA軟件可以根據需要,對操作界面上設備的顏色、尺寸、位置和形狀進行修改。系統采用動畫的形式對設備運行狀態進行呈現,效果形象逼真、富有動感;在主界面中一般應用不同的顏色表示設備不同的運行狀態,灰色表示未投入運行,綠色代表投入運行,紅色代表故障[9];當設備故障時系統界面會有語音報警和文字報警并顯示具體故障位置。智能化帶式輸送機系統主界面如圖3所示。
2.2 井下PLC控制系統
井下PLC控制系統主要由PLC控制箱、溫度傳感器、IP廣播(調度室可以直接與帶式輸送機機頭喊話)、堆煤傳感器(監測皮帶上堆煤高度)、跑偏開關(檢測是否跑偏有一級和二級之分)、閉鎖開關、速度傳感器(檢測膠帶速度)、煙霧傳感器、噴水電磁閥、載荷裝置(監測帶式輸送機上的煤流)等設備組成。PLC控制箱主要由觸摸屏、PLC模塊和輔助電器設備等組成。PLC部分由電源模塊、CPU、輸入模塊、輸出模塊和模擬量模塊組成。其作用是接收傳感器所采集的信號和發出命令信號,控制相關設備并采集滾筒溫度、帶式輸送機速度等數據。本次改造采用的是西門子公司生產的SIMATIC S-1200型PLC控制箱,該型號PLC是設計緊湊、節省空間、成本低廉且功能強大的模塊化控制器[10]。井下PLC調試應用的是與西門子公司生產的PLC配套的博圖軟件(TIA Portal V14),采用梯形圖(LAD)創建程序代碼。智能化帶式輸送機控制系統結構如圖4所示。
2.3 系統工作流程
2.3.1 就地自動控制
就地自動控制模式通過現場帶式輸送機機頭控制主機,現場操作控制模式旋鈕F4左旋至就地位置,此時智能化帶式輸送機系統控制界面右上角的狀態欄顯示“就地”,之后在旋轉開關旋鈕帶式輸送機一鍵啟停。
2.3.2 遠程自動控制
現場操作控制模式旋鈕F4右旋遠程位置,此時智能化帶式輸送機系統控制界面右上角的狀態欄顯示“遠控”,此時操作員通過點擊帶式輸送機的啟動按鈕就可以啟動帶式輸送機。操作員可以根據帶式輸送機上的堆煤情況選擇帶式輸送機的啟動方式。
(1)逆煤流啟動。在主斜井帶式輸送機上有煤的情況下,為了防止順煤流啟動堆煤,一般選擇逆煤流啟動,即先啟動主平硐帶式輸送機,之后再啟動主斜井帶式輸送機。
(2)順煤流啟動。在主斜井帶式輸送機沒有存煤的情況下,為了節省電能,一般可以選擇順煤流啟動,即先啟動主斜井帶式輸送機,之后再啟動主平硐帶式輸送機。
操作員通過點擊帶式輸送機的停止按鈕,即可停止帶式輸送機。操作員可以根據需要選擇停止方式,一般選用順煤流停止。順煤流停止的時間根據膠帶長度除以膠帶速度計算,將計算好的時間在SCADA組態軟件智能化帶式輸送機系統主界面進行設置,以確保帶式輸送機上不會留煤也不會空載。
2.3.3 無人值守
點擊“無人值守”按鈕,系統彈出確定窗口,例如主斜井帶式輸送機在“遠控”狀態,點擊切換投入“無人值守”模式,此時主平硐帶式輸送機無煤后會自動停止,主斜井帶式輸送機運行并且有煤運輸到機頭后會自動啟動主平硐帶式輸送機。
3 效益分析
2018年4月,大運煤礦對主平硐帶式輸送機和主斜井帶式輸送機進行的智能化改造完成并正式運行。改造后的智能化帶式輸送機系統在社會效益、經濟效益和煤礦安全等方面都為企業帶來了可觀的效益。在7個月的運行中處置了一起膠帶斷裂事故和多起膠帶跑偏事故;智能化帶式輸送機系統運行后減少了故障檢測時間,大大提高了工作效率,減少了運輸時間(根據統計大約減少18%的運輸時間),提高了運輸效率。
3.1 社會效益
(1)智能化帶式輸送機系統提升了大運煤礦井下運輸系統的整體管理水平,促進了同類型煤礦實施智能化礦山的進程。
(2)智能化帶式輸送機系統改變了傳統生產方式,優化了生產流程,提高了礦井自動化程度,進一步改善了工人的勞動環境。
3.2 安全效益
智能化帶式輸送機系統運行后,建立了以安全和生產為中心的企業管理機制安全生產控制體系,加強了集團公司對下級企業的監管力度,使安全和生產的投入效益發生最優化,產生最大效益。
3.3 經濟效益
智能化改造前,大運煤礦的帶式輸送機系統共需要現場工作人員12人,智能化改造后,帶式輸送機系統只需配備巡檢人員3人,按照每人月薪5000元計算,一年可節約工資54萬元,降低了人工成本。
4 結論與建議
(1)智能化帶式輸送機系統改造完成后,調度員和生產指揮人員能夠直觀、準確地掌握煤流運輸過程的實際情況,便于調度指揮。系統對重要數據進行記錄,為處理事故提供了真實依據,可有效指揮生產、處理和解決生產中出現的各種問題和事故,達到了建設預期和建設目的。
(2)智能化帶式輸送機系統經過長時間運行,系統運行穩定,提高了工作效率,降低了生產成本,從安全和經濟方面都給企業帶來了可觀的效益,證明智能化帶式輸送機系統值得在煤礦企業中大力推廣。
(3)智能化帶式輸送機系統改造完成后,建議礦山企業至少配備具有一定的計算機和網絡知識人員3人和操作員3人,以便解決系統運行過程中出現的常規問題和故障,保證系統安全高效運行。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
印刷工業(2020年4期)2020-10-27 02:45:52
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國交通信息化(2017年4期)2017-06-06 07:21:52
工業設計(2016年4期)2016-05-04 04:00:23
能源(2015年8期)2015-05-26 09:15:56
現代企業(2015年8期)2015-02-28 18:55:34
