分布式驅動電動汽車電液復合ABS控制研究*
2019-11-26 07:17:40潘勁潘浩裴曉飛陳禎福張杰
汽車技術 2019年11期
潘勁 潘浩 裴曉飛 陳禎福 張杰
(1.浙江萬向精工有限公司,杭州 311202;2.武漢理工大學,現代汽車零部件湖北省重點實驗室,武漢 430070;3.武漢理工大學,汽車工程學院,武漢 430070)
1 前言
電液復合制動由電機回饋制動和液壓制動組成,是電動汽車提高續駛里程和優化制動安全性能的關鍵技術[1]。分布式驅動電動汽車可為每個車輪提供可調易控、高精度的回饋制動力矩,是研究電液復合ABS 控制的理想載體。電液復合ABS 可以充分利用電機制動響應快、控制準的特點,具備以下潛在優勢:通過目標制動力矩的精確響應,提高滑移率控制精度;液壓制動力矩可以在ABS受控時間內維持在穩定范圍,減少液壓制動執行器工作狀態的頻繁切換;回收部分制動能量,改善車輛能量利用率和續駛里程。
很多學者在新能源汽車的電液復合ABS 控制領域做了大量的研究工作。Tur等[2]設計了一種由直流無刷電機參與的再生ABS,在緊急制動工況下的控制效果明顯優于傳統液壓ABS。Peng 等[3]針對混合動力汽車提出復合ABS 方案,基于邏輯門控制實現液壓制動,利用模糊控制動態調節再生制動。趙國柱等[4]提出一種融合電機再生制動的低速ABS 控制方法,基于模糊邏輯完成滑移率的動態跟蹤。金賢建等[5]提出一種基于滑模變結構的并聯HEV防抱死制動和再生制動協調控制策略,回饋制動力矩受控于模糊邏輯動態調節策略。Oleksowicz[6-7]分析了再生制動和防抱死制動之間存在的潛在制約關系,針對后軸驅動電動汽車設計了3種防抱死制動力矩分配策略。趙治國等[8]針對四驅混合動力汽車設計了協調防抱死控制策略,當判斷抱死情況即將發生時,維持當前再生制動力矩,調節液壓制動力矩來完成滑移率控制。Wang[9]以獲取最優滑移率為目的,為復合ABS設計了一種魯棒控制器,并基于李雅普諾夫方法驗證控制器的穩定性。
對于分布式驅動電動汽車的復合ABS 技術,Solliec[10]針對后輪輪轂電機驅動汽車,提出了前輪純液壓ABS 和后輪復合ABS 的組合防抱死控制策略。楊鵬飛等[11]針對四輪輪轂電機驅動汽車,設計了由上層滑模廣義力控制和下層二次規劃法優化分配組成的復合ABS 分層控制器。Ivanov[12-13]圍繞輪邊電機驅動汽車提出一種由前饋控制和反饋控制組成的連續滑移率控制策略,期望制動力矩由再生制動和液壓制動共同完成。Huang[14]提出了一種基于非線性模型預測控制的復合制動協調控制器,根據期望車速跟隨和制動能量回收最大化兩個目標構建成本函數,以車輪滑移率為約束,以制動安全性為優化目標搜索全局最優解。
本文提出電液復合ABS的分層控制結構,在車輪滑移率控制中,根據車輪運動狀態確定各輪的期望制動力矩,在多模式力矩分配控制中,實現四輪液壓制動與回饋制動力矩的協調分配,并通過聯合仿真完成復合ABS策略的可行性驗證。
2 總體控制策略
電液復合ABS控制的總體框架分為4個部分,包括車輛狀態與路面識別模塊、制動模式判斷模塊、滑移率控制模塊、電液制動力矩分配模塊,如圖1所示。首先,在車輛狀態和路面識別模塊中分別估計縱向參考車速和路面附著系數,以便獲得實際滑移率和理想滑移率。縱向車速估計和路面識別方法可參考文獻[15]、文獻[16],這里假設參考車速和路面附著系數已知。然后,在制動模式判斷模塊中,確定當前是否觸發ABS 功能,并輸出相應的標志位。一旦進入ABS控制,車輪的實際滑移率需始終保持在目標值附近,為此,采用分層控制結構。其中:滑移率跟隨模塊為上位控制器,獲得各車輪總的制動力矩需求;電液制動力矩分配模塊為下位控制器,根據車輛行駛狀態、電機和電池工作特性,將車輪總制動力矩合理分配為電機回饋力矩和液壓制動力矩,并分別通過CAN總線發送給輪轂電機控制器和電液制動控制器,最終由分布式驅動電動汽車的底層執行機構實現力矩控制指令。
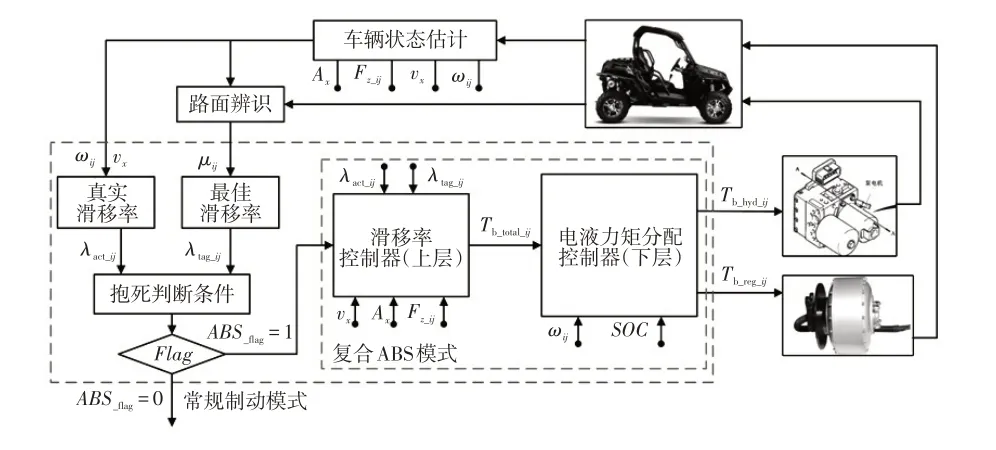
圖1 復合ABS控制結構示意
3 上層滑移率控制
上層滑移率控制器的輸入為目標滑移率與實際滑移率之間的偏差,輸出為輪邊所需的總制動力矩。本文參考文獻[11]、文獻[17]采用廣泛使用的滑模控制,定義滑模面s為滑移率偏差e(t):

式中,λdes為目標滑移率,與路面附著條件有關;λ為實際滑移率。
實際滑移率的定義式為:

式中,u為參考車速;r為車輪半徑;ω為車輪轉動角速度。
此外,對滑模面進行修正,引入積分項,以削弱外部擾動的影響,改進后的滑模面為:

式中,c>0為積分常數;t為系統運行時間。
當系統在滑模面運動時,滿足以下關系:

對式(2)求導后,得:

同時,根據車輪旋轉的動力學方程,有:

式中,Fz為車輪垂向載荷;Iw為車輪轉動慣量;μ為路面附著系數;Tbrk為輪邊制動力矩。
聯立式(4)~式(6),滑模面存在以下形式:

采用帶有飽和函數的指數趨近律,可表達為:

式中,k·s為指數項,保證系統狀態迅速到達滑動模態;sat(s)為飽和函數,具體形式為:
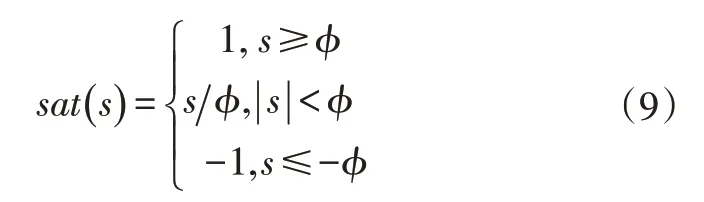
式中,φ為邊界層厚度。
因此,結合式(7)~式(9),可得車輪制動力矩的表達式為:

從式(10)可以看出,車輪制動力矩與路面附著條件、滑移率偏差、參考車速和車輪垂向載荷有關。通過調整積分系數c、邊界層厚度φ、趨近律系數ε和k,能夠使系統狀態快速到達滑模面,并消除滑模面兩側的抖振,實現滑移率控制目標。
4 下層制動力矩分配控制
4.1 力矩分配總體設計
對于分布式驅動電動汽車而言,單輪回饋制動能力有限,同時,回饋力矩受車速、電機工作特性、電池充電功率及荷電狀態(State Of Charge,SOC)等多重因素影響。因此,下層制動力矩分配策略的總體設計思路為:
a.液壓制動力矩提供絕大部分的目標力矩,并在控制過程中盡量穩定在一定值,避免液壓制動力矩的高頻、大幅度波動。
b.電機回饋制動力矩補償目標力矩的剩余部分,如果上層滑移率控制器輸出的總制動力矩出現變化,優先選擇電機回饋力矩進行快速調節,從而滿足目標力矩的動態需求。
為此,基礎液壓力矩Thyd_wen應該設置在總制動力矩穩態值附近,最大限度減少液壓制動力矩在滑模控制中的變化:

式中,μmax為路面峰值附著系數。
一次電液復合ABS 的制動力矩變化曲線如圖2 所示,由圖2可知,在ABS控制過程中,回饋制動力矩始終跟隨總需求力矩進行調節,而液壓制動力矩只在回饋制動力矩到達最大限值后才發生變化。
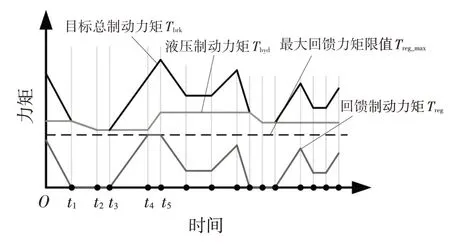
圖2 復合ABS制動時力矩變化示意
4.2 液壓制動力矩階梯增減邏輯
為了降低目標液壓制動力矩頻繁調節對滑移率控制的影響,保證制動過程的舒適性,本文參考傳統ABS中的階梯增/減壓邏輯[18],設置了增/減矩門限值。對于總制動力矩增大/減小的工況,當回饋制動力矩達到最大值/最小值后,只有當計算出的液壓制動力矩補償值大于增矩/減矩門限ΔTincr/ΔTdecr的絕對值后,液壓制動力矩值才增大/減小,否則保持不變。
圖3 顯示了典型的液壓制動力矩調節過程,包括5種常見的調節情況,即快速增加、緩慢增加、快速減小、緩慢減小以及輕微波動。圖3中,Tint為計算出的液壓制動力矩補償值,Tmod為階梯增減邏輯修正后的液壓制動力矩補償值。

圖3 液壓制動力矩階梯增/減壓示意
t0~t1為緩降階段,t2~t3為緩增階段,此時的力矩需求增大或減小速度較慢,只有當力矩變化值到達相應的門限值后才進行一次動作,呈現明顯的階梯變化。
t3~t4為快增階段,t5~t6為快減階段,此時的力矩需求在短時間內快速調節,力矩變化值很容易到達門限值,呈現連續階梯變化,Tmod輸出曲線與Tint輸出曲線間重合度較好,說明階梯增減邏輯能滿足力矩的快速變化。
t1~t2為力矩輕微波動階段,此時的力矩需求總體穩定在某個范圍內,并伴有小幅波動,但其中絕大多數波動沒有到達力矩變化門限值,階梯邏輯會作出力矩保持原值不變的判斷,Tmod輸出曲線相對平穩,說明階梯增減邏輯可以消除液壓制動力矩補償值中的波動,避免執行器工作狀態的頻繁切換。
4.3 力矩分配的模式切換
為了實現液壓制動力矩和電機回饋力矩間協調定量的分配,本文借鑒有限狀態機理論以及傳統ABS的邏輯門限值控制,將復合ABS的電液力矩分配劃分為7種模式。
首先,定義當前的目標制動力矩Tbrk與前一時刻液壓制動力矩Thyd的差值為力矩調節需求量ΔT:

根據力矩調節需求量的大小,可將力矩分配劃分為兩類情況討論,即ΔT<0和ΔT≥0。
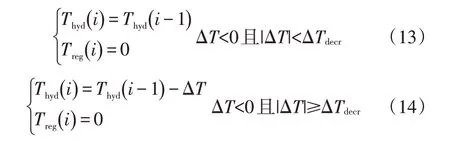
4.3.1 力矩調節需求量為負
此時的目標制動力矩需求正在快速下降,即使回饋制動完全退出,前一時刻的液壓制動力矩仍然過大,因此液壓制動必須減小以跟隨總制動力矩的變化。根據力矩調節需求量與液壓制動減矩門限值間的關系制定規則:
4.3.2 力矩調節需求量為非負
此時的目標制動力矩需求增大,電機回饋制動力矩優先調節以滿足總力矩需求的變化,但是回饋制動力矩受多因素制約,存在最大值Tmax_MotBat。此外,為了避免回饋制動力矩長期工作在最大值狀態,設置調節系數ζ,使回饋制動力矩調節有一定預留量。定義回饋制動力矩調節最大值TΔ_MotBat,以預留一定的回饋制動力矩調節空間給下一個控制周期,充分利用回饋制動快速響應的特點:

因此,根據ζ、ΔT、Tmax_MotBat和TΔ_MotBat的關系可以制定以下5種規則:
a.0≤T<ζ·Tmax_MotBat時:
b.ζ·Tmax_MotBat≤ΔT<Tmax_MotBat且ΔT-ζ·Tmax_MotBat≥ΔTincr時:

c.ζ·Tmax_MotBat≤ΔT<Tmax_MotBat且ΔT-ζ·Tmax_MotBat<ΔTincr時:

d.Tmax_MotBat≤ΔT且ΔT-Tmax_MotBat≥ΔTincr時:
e.ΔT≥0且Tmax_MotBat≤ΔT且ΔT-Tmax_MotBat<ΔTincr時:
綜上所述,下位控制器根據調節系數、力矩調節需求量、回饋制動力矩最大值以及液壓制動減矩門限值等參數之間的關系,開展制動模式切換。
5 仿真驗證
對電液復合防抱死控制策略開展包括多模式力矩分配和高、低附著路面下的ABS仿真研究。分布式驅動整車動力學模型選取CarSim 中的B 級車,電控制動(Electronic Controlled Braking,ECB)系統液壓執行器模型參照文獻[19]中的系統結構在AMESim 中搭建,多模式力矩分配模塊在Stateflow 中搭建,其余模塊在Simulink環境中完成。
此外,本文中輪轂電機采用無刷直流(Brushless Direct Current,BLDC)電機,參數如表1 所示。仿真中的電機模型基于試驗數據采用三維查表方式搭建。通過圖4 所示的電機輸出特性圖獲取其在特定轉速和轉矩輸出下的工作效率。考慮到輪轂電機直接驅動車輪轉動,因此在電機模型中默認電機輸出轉速即為車輪輪速。
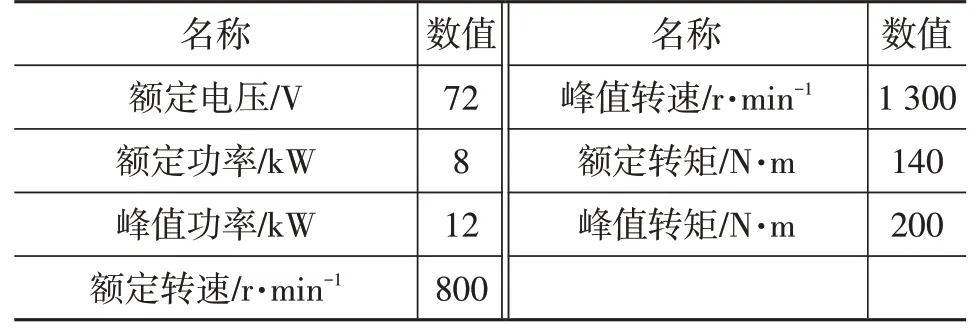
表1 輪轂電機參數
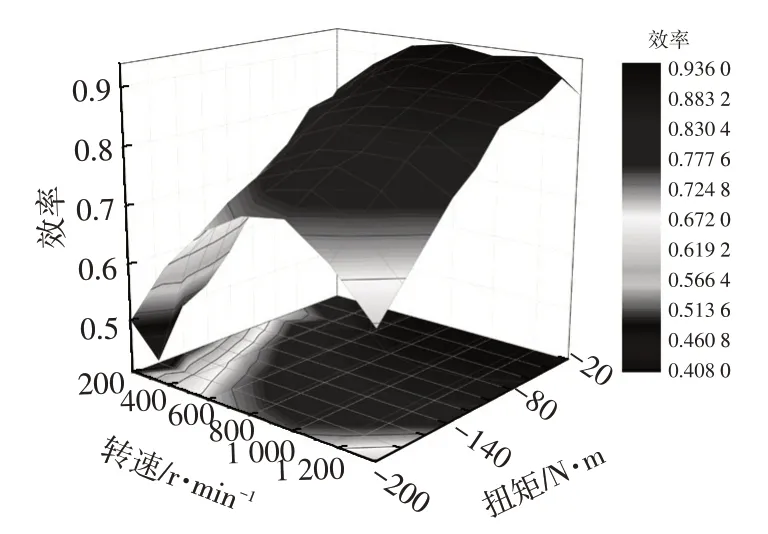
圖4 輪轂電機特性圖
5.1 下層力矩分配控制策略驗證
為驗證電液復合制動力矩分配的控制效果,進行如下的工況設置:路面附著系數為0.4,初始車速為72 km/h,期望滑移率為0.14~0.17。
如圖5 所示為下層控制策略對應的制動力矩分配曲線。從圖5可以看出,對于多模式電液復合制動力矩分配,當滑移率進入穩態階段,力矩分配模式會穩定在某一狀態,總制動力矩和前、后制動力矩也維持在穩定值,一旦總制動力矩目標值出現波動,回饋制動力矩可以迅速調節滿足需求。
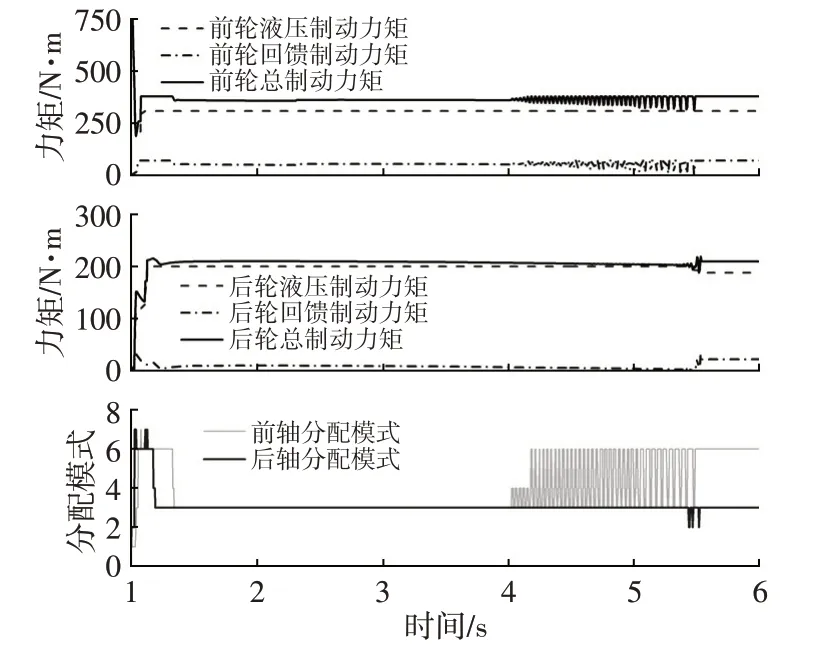
圖5 基于模式切換的電液制動力矩分配變化曲線
5.2 高附著路面復合ABS仿真分析
在高附著路面條件下(附著系數為0.8),將期望滑移率設為0.15~0.17,進行初速度為108 km/h的電液復合ABS 制動仿真,結果如圖6 所示。由圖6b 可知,在防抱死控制介入后,滑移率曲線經過短暫抖動后進入穩定狀態,直至車速低于10 km/h后退出防抱死控制。由圖6c可知,高速工況下復合ABS的制動力矩大部分由液壓制動提供,由于力矩受限,電機回饋制動力矩相對很小。仿真結果表明:通過電機回饋制動和液壓制動的協調分配,電液復合ABS策略能夠實現精準的滑移率控制。
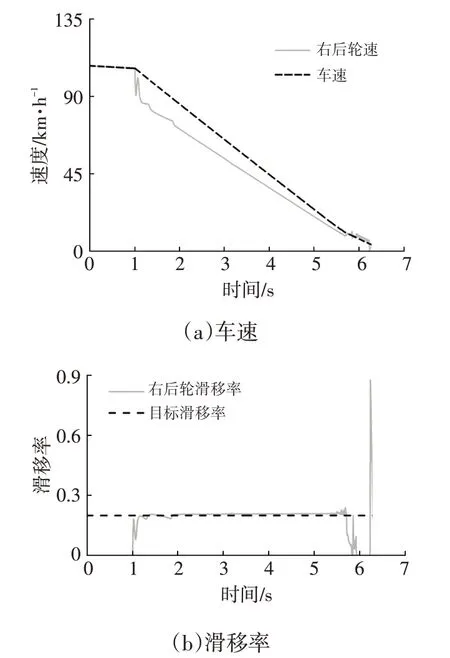

圖6 高附著路面下108 km/h電液復合ABS仿真結果
5.3 低附著路面復合ABS仿真分析
在附著系數為0.2 的低附著路面條件下,將期望滑移率設為0.12~0.14,初速度為54 km/h 的電液復合ABS 仿真結果如圖7 所示。由圖7b 可知,在第1.5 s 時滑移率經過約0.5 s 的輕微抖動后進入穩態階段,并能夠維持在0.12~0.14 的理想值區間內。從圖7c 中可以看出,在ABS 觸發后的0.5 s 內液壓制動力矩有短期振蕩,這是由于ABS 啟動后液壓制動力矩目標值迅速下降,液壓系統滯后引發制動力矩跟隨上的波動,當總制動力矩進入穩態值之后,電機回饋制動力矩和液壓制動力矩均保持在一定的穩定區間內。此外,滑移率控制進入滑模面之后,由于外界干擾使得總制動力矩出現了一段時間的小幅波動,此時對應的電機回饋制動在可調范圍內快速變化,從而使液壓制動力矩保持穩定值。7 s 后,由于車速低于10 km/h,系統退出防抱死控制。對比圖6c 和7c 可以看出,相較于低附著路面工況,高附著路面工況下的電液制動力矩曲線在動態調節時沒有出現高頻低附抖振,這是因為高附路面的制動力矩抗干擾能量更強,制動力矩的微調不易引起滑移率的抖振,進而制動力矩曲線穩態區域更為平滑。
6 結束語
本文圍繞面向防抱死制動的電液復合制動協調控制策略,充分利用分布式電動汽車四輪回饋制動和液壓制動均獨立可調的優點,設計了由基于積分滑模的滑移率控制和基于模式切換的力矩分配控制構成的分層策略。多種工況下復合ABS 的仿真結果表明:所提出的復合防抱死控制策略可以提高滑移率控制精度,減小液壓制動執行器工作狀態的調節頻率,為先進控制算法在防抱死系統上的應用進行了有益嘗試。未來考慮在分布式驅動試驗車上進一步完成復合ABS 的道路測試。
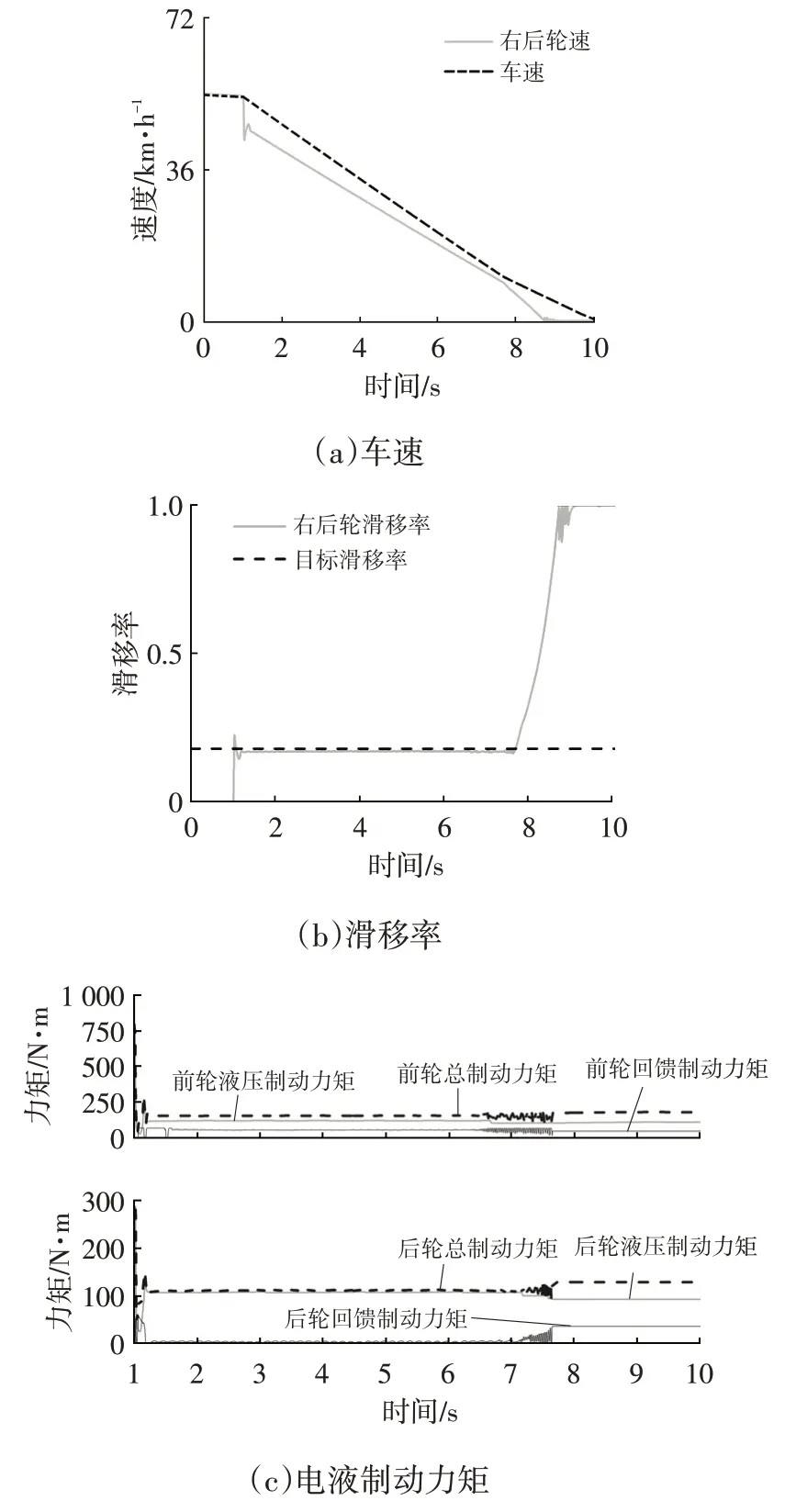
圖7 低附著路面下54 km/h電液復合ABS仿真結果
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
