基于TECS的艦載機軌跡角控制研究
2019-11-28 15:47:09劉濤蒙澤海白榮強
科技創新與應用 2019年31期
劉濤 蒙澤海 白榮強

摘? 要:艦載機進近著艦時多面臨軌跡穩定性的問題。軌跡穩定性的下降和飛機進入第二平飛狀態時阻力急劇增大有關,此時飛機的軌跡變化和操縱期望不匹配,突出表現為飛機總能量的急劇發散。對此基于總能量控制(TECS)的思路,設計了艦載機在軌跡不穩定性情況下的軌跡角控制器,經同常規動力補償系統(APCS)的對比和蒙特卡洛拉偏仿真,表明基于TECS設計的軌跡角控制器,對于解決軌跡不穩定問題,有重要的工程意義。
關鍵詞:軌跡穩定性;平飛范圍;總能量控制;動力補償系統
中圖分類號:V212.1? ? ? ? 文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2019)31-0015-03
Abstract: Carrier-based aircraft's approach landing state often faces flight path stability problems. The decline of flight path stability is related to the dramatic increase of drag force when the aircraft enters the second level flight area, where mismatch between aircraft longitudinal control and actual trajectory changes appear, and mainly manifested by the sharp divergence of the total energy of the aircraft. Based on the idea of Total Energy Control System (TECS), a path angle controller for carrier-based aircraft under flight path instability is designed. Compared with conventional Automatic Power Compensation System (APCS) and Monte Carlo simulation, it shows that the path angle controller designed by TECS has good application value and has important engineering significance for solving the problem of flight path instability.
Keywords: flight path stability; second level flight area; TECS; APCS
引言
同陸基飛機相比,艦載機由于常常存在軌跡穩定性差的情況,導致其進場著艦困難。軌跡穩定性指駕駛員僅通過俯仰操縱來控制飛機飛行軌跡(高度)時的閉環穩定性情況[1-2]。軌跡穩定性下降甚至失穩常常發生在低速飛行狀態,進入違反常規駕駛習慣的“反操縱區”,也就是飛機阻力曲線的“背區”[3-4],此時駕駛員難以實現軌跡的精確跟蹤,甚至會為進場著陸飛行帶來風險。因此,采取控制措施,解決軌跡不穩定帶來的進場著艦難題,提高著艦安全性,是十分必要的。
為解決艦載機進場著陸時的軌跡穩定性問題,早在1948年,美國海軍就提出了建立動力補償系統(Approach Power Compensation System, APCS),實現全自動著艦(Automatic Carrier Landing System, ACLS)的構想,經過多年發展已經形成了成熟的艦載機自動著艦技術,并在F/A-18上得到成功應用[5-8]。在我國國內,對動力補償技術的研究也已非常廣泛,常規的APCS技術也已成熟。但對于航母發展仍處于起步階段的我國,艦載機進近著艦時的軌跡穩定性和軌跡控制,仍需進一步探索研究。
本文立足前人研究基礎,首先簡要介紹軌跡穩定性的原理和判據,其次采用總能量控制TECS方法,建立艦載機著艦時的軌跡角控制方案,最后對比在艦載機上常規使用的基于迎角恒定的APCS方法和TECS方法的控制效果,并進行蒙特卡洛拉偏仿真。結果表明,采用TECS控制方法,可以使飛機的姿態和軌跡解耦,規避軌跡不穩定問題,并相比APCS方法獲得更好的軌跡角控制收益。
1 軌跡穩定性概述
飛機的平飛需用推力曲線可以反映軌跡穩定性。在第二平飛范圍,也就是阻力曲線的“背區”,飛機的阻力隨速度減小而增大。當飛機的飛行速度處于這一區域時,如果駕駛員意圖拉桿使飛機爬升,同時保持油門桿不動,雖然在短時間內飛機會抬頭并減速,軌跡向上,但同時阻力隨速度減小而迅速增大,飛機最終將因為剩余功率不足而轉為下滑。這種拉桿-減速-軌跡向下的運動,就是由軌跡不穩定導致的非預期現象。
軌跡角對空速的變化率d?酌/dV常作為軌跡穩定性的判據[9]。該參數可由軌跡角和速度對升降舵的傳遞函數推導得到,經簡化也可表達為式(1)。
即
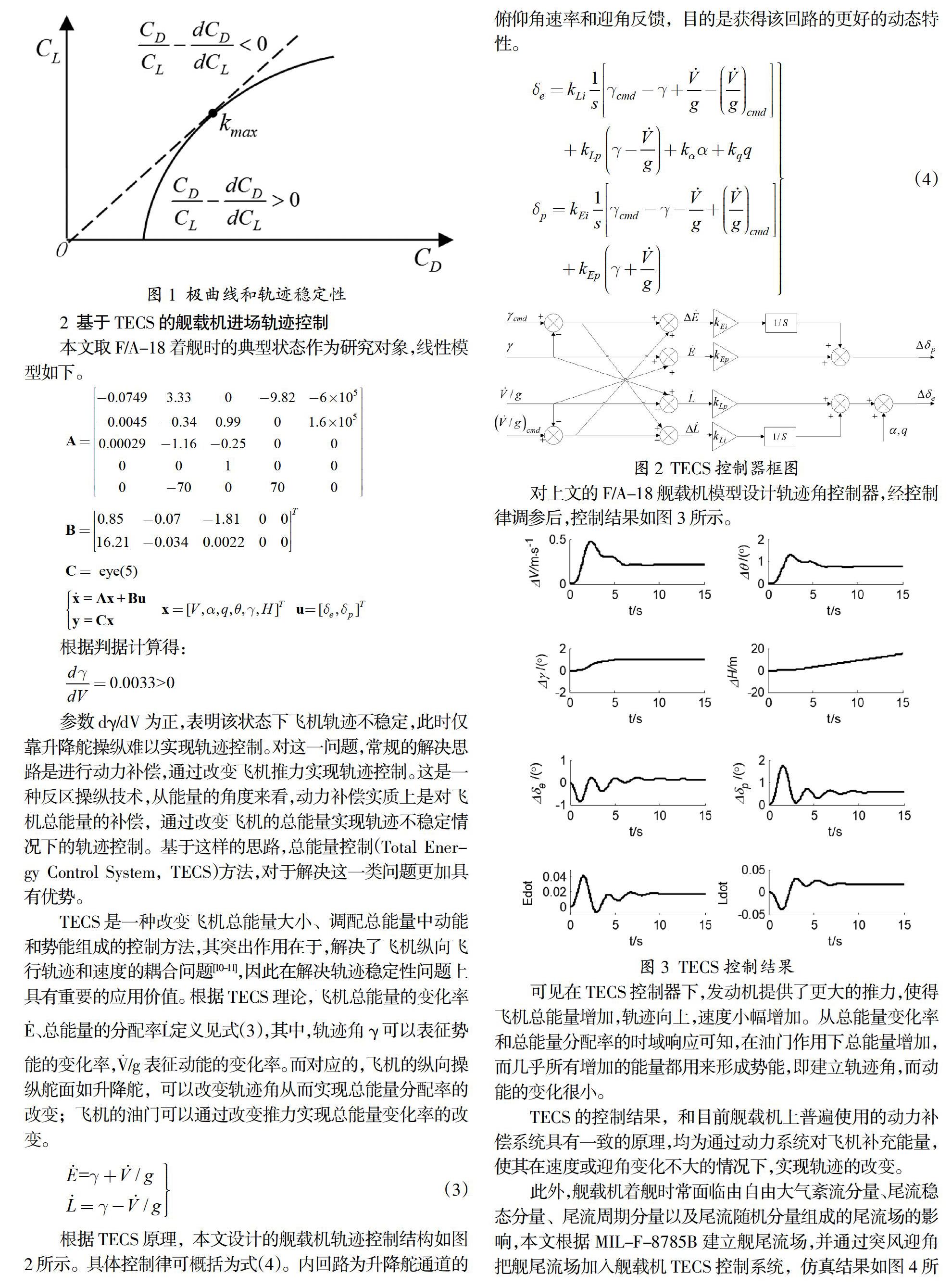
式(2)指出了軌跡穩定性和極曲線的關系,如圖1所示。以最大升阻比為界,分為軌跡穩定和不穩定兩個區域。
軌跡穩定性屬于飛行品質要求的一部分,對此軍民用飛機有著不同的規定。對比MIL-F-8785C和CCAR-25的相關條款,簡要而言,軍機允許軌跡不穩定現象的存在,但不得“過于不穩”,也不得下降過快;而民機則不允許存在軌跡不穩定的情況,且必須表明具有足夠的軌跡穩定性裕度。
飛機的軌跡穩定性常通過飛行試驗表明。飛機以進場著陸構型,在最小使用速度左右取不同速度進行直線下滑,記錄數據并繪制V-?酌曲線,從而得到d?酌/dV信息, 最終對軌跡穩定性作出定量判斷。
2 基于TECS的艦載機進場軌跡控制
本文取F/A-18著艦時的典型狀態作為研究對象,線性模型如下。
根據判據計算得:
參數d?酌/dV為正,表明該狀態下飛機軌跡不穩定,此時僅靠升降舵操縱難以實現軌跡控制。對這一問題,常規的解決思路是進行動力補償,通過改變飛機推力實現軌跡控制。這是一種反區操縱技術,從能量的角度來看,動力補償實質上是對飛機總能量的補償,通過改變飛機的總能量實現軌跡不穩定情況下的軌跡控制。基于這樣的思路,總能量控制(Total Energy Control System, TECS)方法,對于解決這一類問題更加具有優勢。
TECS是一種改變飛機總能量大小、調配總能量中動能和勢能組成的控制方法,其突出作用在于,解決了飛機縱向飛行軌跡和速度的耦合問題[10-11],因此在解決軌跡穩定性問題上具有重要的應用價值。根據TECS理論,飛機總能量的變化率■、總能量的分配率■定義見式(3),其中,軌跡角γ可以表征勢能的變化率,■/g表征動能的變化率。而對應的,飛機的縱向操縱舵面如升降舵,可以改變軌跡角從而實現總能量分配率的改變;飛機的油門可以通過改變推力實現總能量變化率的改變。
根據TECS原理,本文設計的艦載機軌跡控制結構如圖2所示。具體控制律可概括為式(4)。內回路為升降舵通道的俯仰角速率和迎角反饋,目的是獲得該回路的更好的動態特性。
對上文的F/A-18艦載機模型設計軌跡角控制器,經控制律調參后,控制結果如圖3所示。
可見在TECS控制器下,發動機提供了更大的推力,使得飛機總能量增加,軌跡向上,速度小幅增加。從總能量變化率和總能量分配率的時域響應可知,在油門作用下總能量增加,而幾乎所有增加的能量都用來形成勢能,即建立軌跡角,而動能的變化很小。
TECS的控制結果,和目前艦載機上普遍使用的動力補償系統具有一致的原理,均為通過動力系統對飛機補充能量,使其在速度或迎角變化不大的情況下,實現軌跡的改變。
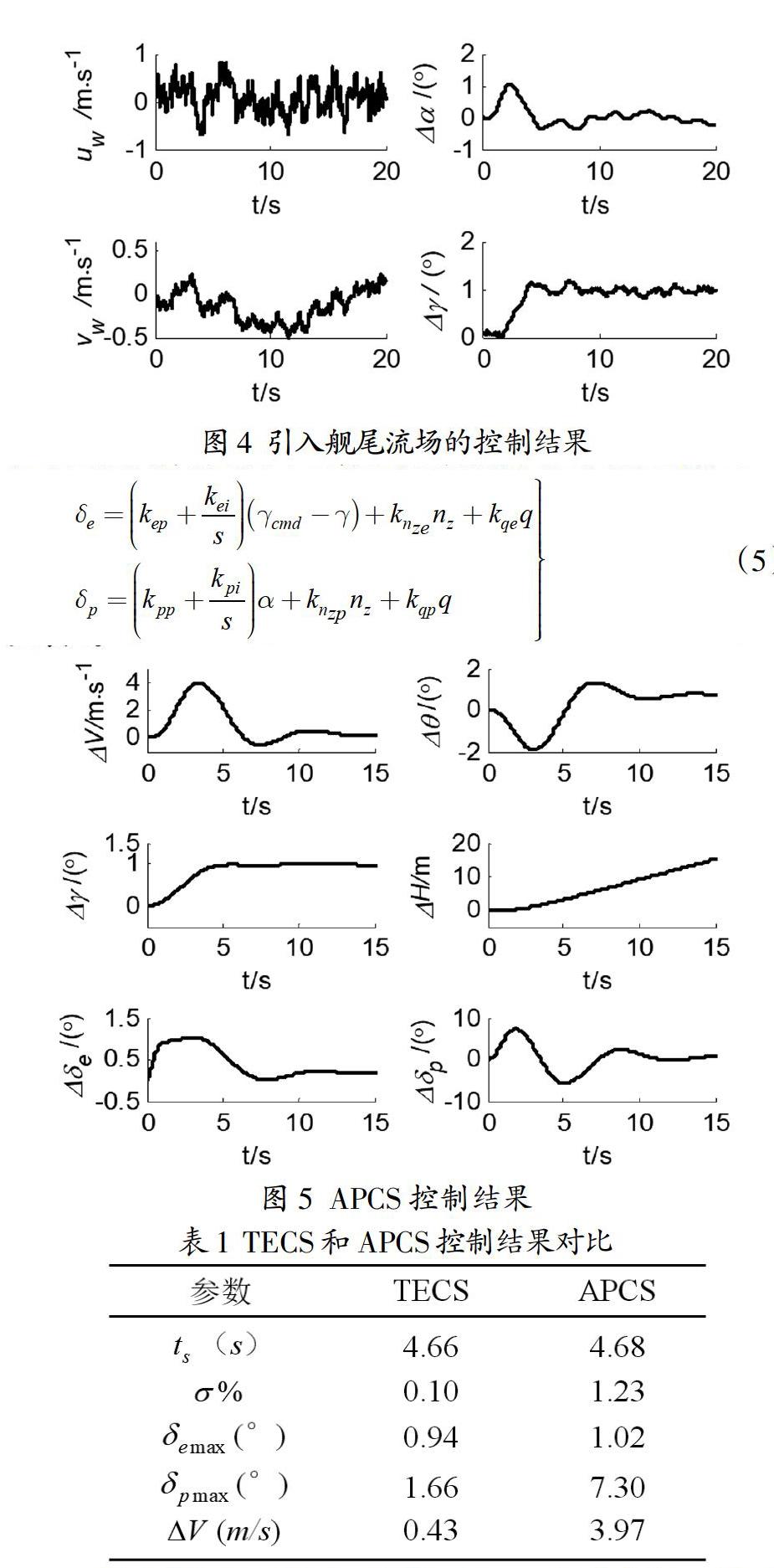
此外,艦載機著艦時常面臨由自由大氣紊流分量、尾流穩態分量、尾流周期分量以及尾流隨機分量組成的尾流場的影響,本文根據MIL-F-8785B建立艦尾流場,并通過突風迎角把艦尾流場加入艦載機TECS控制系統,仿真結果如圖4所示。
結果表明,TECS控制系統在艦尾流場下,軌跡角響應的超調量不超過20%,調節時間基本不變,存在小幅振蕩,依然可以實現控制目標。
3 TECS和APCS的控制性能比較
為進一步確定TECS控制器對艦載機進場著艦時軌跡控制的優勢,本文對比了其與保持迎角恒定的APCS系統的控制結果。保持迎角恒定的APCS控制律如式(5)所示。該控制系統在油門通道加入迎角、法向過載和俯仰角速度的反饋,意在通過油門保持迎角不變,同時改善油門通道的動態特性。
對同樣的飛機狀態點設計迎角恒定的APCS,各狀態量的時域響應曲線如圖5所示,APCS同TECS的控制性能對比見表1。
可見在調節時間相當的情況下,TECS的超調量、用舵量以及速度變化量均明顯降低,尤其是大幅減少了油門桿偏角,保證了艦載機能有足夠的動力裕度應對其他突發事件。
進一步,本文通過基于拉丁超立方抽樣的蒙特卡洛拉偏,檢驗了TECS和APCS的魯棒性。設置模型內各參數的不確定度均為20%,拉偏次數為30,軌跡角的拉偏結果如圖6所示。可見TECS經拉偏后,雖然存在小幅度振蕩情況,但調節時間、超調量等無顯著增大,軌跡角的響應沒有出現明顯惡化;而APCS拉偏結果存在超調增大、調節時間增長的現象,控制性能明顯下降。因此在本文條件下,APCS的魯棒性不及TECS。
4 結束語
本文介紹了軌跡穩定性的概念和判據,并就艦載機軌跡穩定性差的問題,分別利用TECS和APCS設計了解決軌跡不穩定問題的控制方案。所得結論如下:
(1)軌跡穩定性主要和飛機的升阻特性有關,并主要受阻力特性主導,當飛機處于第二平飛范圍時,軌跡穩定性下降并失穩。(2)軌跡不穩定體現為飛機總能量的發散,這為采用TECS控制飛機軌跡提供了思路,這也與常規解決軌跡不穩定的動力補償系統控制思路一致;(3)TECS控制可以實現飛機在軌跡不穩定情況下的軌跡角控制,且相比于APCS,具有更好的控制收益和魯棒性。
參考文獻:
[1]桑雨生.飛行軌跡穩定性應用的分析[J].飛行力學,1999(2):72-77.
[2]范立欽.飛行軌跡穩定性[J].飛行力學,1983(1):235-244.
[3]方振平,陳萬春,張曙光.航空飛行器飛行動力學[M].北京:北京航空航天大學出版社,2012:51-52.
[4]王新華,楊一棟,朱華.低動壓著艦狀態下飛機的操縱特性研究[J].飛行力學,2007(4):29-32.
[5]崔玫. 艦載機全自動著艦引導飛控系統設計[D].哈爾濱工程大學,2014.
[6]T S Durand, G L Teper.? An Analysis of Terminal Flight Path Control in Carrier Landing[R].? AD-606040, 1964.
[7]S J Craig, R F Ringland, I H Ashkenas.? An Analysis of Navy Approach Power Compensator Problem and Requirements[R]. AD-722025, 1969.
[8]唐大全,畢波,王旭尚,等.自主著陸/著艦技術綜述[J].中國慣性技術學報,2010(5):550-555.
[9]Background information and user guide for MIL-F-8785B(ASG), Military Specification Flying Qualities of Piloted Airplanes.[M] AFFDL-TR-69-72. 1969.
[10]吳樹范,蔡維黎,沈勇璋,等.飛機總能量控制系統的研究Ⅰ——原理分析與系統設計[J].航空學報,1993(7):355-361.
[11]Lambregts A A. Vertical Flight Path and Speed Control Autopilot Design Using Total Energy Principles. AIAA 83-2236CP.
